Antipiretici za djecu propisuje pedijatar. Ali postoje situacije hitne nege groznice, kada dete treba odmah da lek. Zatim roditelji preuzmu odgovornost i primenjuju antipiretičke lekove. Šta je dozvoljeno dijete? Kako možete smanjiti temperaturu kod starije dece? Koji su lekovi najsigurniji?
Šema motora.
Motorni krug paralelno uzbuđenje prikazan je na Sl. 1.25. Namotavanje armature i navijanje uzbude su paralelno povezani. U ovoj šemi: I je struja koju motor koristi iz mreže, ja je struja armature, I c je struja ekscitacije. Iz prvog Kirchhoffovog zakona sledi da sam = I n + I c.
Prirodne mehaničke karakteristike. Prirodna mehanička karakteristika je opisana formula (1.6).
U praznom hodu, M = 0 i n x = U / C ∈ F.
Ako je Φ = const, onda je jednačina mehaničke karakteristike u obliku:
n = n x– bM, (1.8)
gde je b = R π / C ∈ F.
Od (1.8) slijedi da je mehanička karakteristika (slika 1.26, direktna jedan.) - ravno sa nagiba padine i b. Od motora direktna struja R je mali, a onda sa povećanim opterećenjem na vratilu, brzina rotacije n varira neznatno - karakteristike ovog tipa nazivaju se "kruto".
Struja koja se troši motorom iz mreže praktično povećava srazmerno trenutnom opterećenju. Zaista, M »Mm = Cm I i F, a pošto je motor paralelnog uzimanja F = const, onda I n ~ M.
Kontrola brzine.
kontrola brzine je moguće (1.6) na tri načina: varijacije magnetnih polova glavnog toka F, promjena u otpornosti krug R I armature i promjene primijeniti na napon armature kola U (n promijeniti zbog promjene u trenutku M koncept regulacije opterećenja nije uključen).
 Regulacija n promjenom magnetnog fluksa Φ se vrši pomoću prilagođavajućeg reostata R p. Sa rastućom otpornošću reostata, struja ekscitacije Ic i magnetni fluks glavnih polova 0 se smanjuje. Ovo prvo dovodi do povećanja brzine niskog napona n x i, drugo, povećanja koeficijenta b, tj. na povećanje ugla nagiba mehaničke karakteristike. Međutim, b ostaje mala i održava se krutost mehaničkih karakteristika. Na sl. 1.28 pored prirodnih karakteristika 1, što odgovara maksimalno magnetnog fluksa F, pokazuje porodica mehaničkih karakteristika 2-4 uzeti po sniženoj magnetnog fluksa. Iz karakteristika proizlazi da promenom magnetnog fluksa samo povećava frekvenciju rotacije u odnosu na prirodnu karakteristiku. Praktično takav način može povećati brzinu ne više od 2 puta, jer je povećanje brzine dovodi do pogoršanja u prebacivanju, pa čak i mehanička oštećenja na aparatu.
Regulacija n promjenom magnetnog fluksa Φ se vrši pomoću prilagođavajućeg reostata R p. Sa rastućom otpornošću reostata, struja ekscitacije Ic i magnetni fluks glavnih polova 0 se smanjuje. Ovo prvo dovodi do povećanja brzine niskog napona n x i, drugo, povećanja koeficijenta b, tj. na povećanje ugla nagiba mehaničke karakteristike. Međutim, b ostaje mala i održava se krutost mehaničkih karakteristika. Na sl. 1.28 pored prirodnih karakteristika 1, što odgovara maksimalno magnetnog fluksa F, pokazuje porodica mehaničkih karakteristika 2-4 uzeti po sniženoj magnetnog fluksa. Iz karakteristika proizlazi da promenom magnetnog fluksa samo povećava frekvenciju rotacije u odnosu na prirodnu karakteristiku. Praktično takav način može povećati brzinu ne više od 2 puta, jer je povećanje brzine dovodi do pogoršanja u prebacivanju, pa čak i mehanička oštećenja na aparatu.
Drugi način kontrole brzine povezan je sa uključivanjem regulacionog reostata R np u seriji sa armaturu (početni reostat Rn je neprikladan za ovu svrhu, jer je dizajniran za kratkoročnu upotrebu). U ovom slučaju formula (1.6) ima oblik:
n =  ,
,
što znači da je brzina u praznom hodu za bilo kakav otpor R ya.r identični, a koeficijent b, a time, nagib mehaničkih karakteristika 5-7 povećava (sl. 1.26). Prilagođavanje brzine rotacije ovom metodom rezultira smanjenjem brzine rotacije u odnosu na prirodne karakteristike. Osim toga, to je neekonomično, jer je povezan s velikim gubicima snage (R ya.r I) u prilagođavanju Reostat na kojoj je cijeli armaturu struja teče.
 Treći način regulisanja brzine je promena napona koji se isporučuje na armaturu bez promjene. Moguće je samo u slučaju kada se armatura motora napaja iz odvojenog izvora, pri čemu se napon može podesiti. Kao primjenjuje poseban regulirano napajanje, posebno dizajniran za motor-generatori ili kontrolirati ventile (thyratrons, živa ispravljači, tiristori). U prvom slučaju se formira sistem mašina gD (generator-motor), (Slika 1.27). Koristi se za glatku kontrolu nad širokim spektrom brzine rotacije snažnih DC motora i u sistemima automatskog upravljanja. Kontrolni sistem sa kontrolisanim HC ventilom (slika 1.28) koristi se za kontrolu brzine rotacije manjih motora. Njegova prednost je sjajna ekonomija.
Treći način regulisanja brzine je promena napona koji se isporučuje na armaturu bez promjene. Moguće je samo u slučaju kada se armatura motora napaja iz odvojenog izvora, pri čemu se napon može podesiti. Kao primjenjuje poseban regulirano napajanje, posebno dizajniran za motor-generatori ili kontrolirati ventile (thyratrons, živa ispravljači, tiristori). U prvom slučaju se formira sistem mašina gD (generator-motor), (Slika 1.27). Koristi se za glatku kontrolu nad širokim spektrom brzine rotacije snažnih DC motora i u sistemima automatskog upravljanja. Kontrolni sistem sa kontrolisanim HC ventilom (slika 1.28) koristi se za kontrolu brzine rotacije manjih motora. Njegova prednost je sjajna ekonomija.
Regulacija brzine rotacije mijenja U praktične mjere samo prema dolje, jer je porast napona iznad nazivne neprihvatljiv zbog brzo prebacivanje propadanja. Od (1.9) slijedi da kada napon se smanjuje u praznom hodu brzina n x, nagib od mehaničkih karakteristika 8-10 nepromijenjene (vidi. Sl. 1.26), oni ostaju težak čak i na niski naponi. Kontrolni opseg (n max / n min) na ovaj način je 6: 1-8: 1. Može se značajno proširiti upotrebom posebnih šema sa povratnim informacijama.
Karakteristika prilagođavanja.
Karakteristika podešavanja n = f (I c) paralelnog motora za uzbunu je prikazana na Sl. 1.29.
Njegov karakter je određen odnos (1.5), iz kojih proizlazi da je učestalost rotacije je obrnuto proporcionalna magnetnog fluksa, a time i struja uzbude I C. Kada disk struja I a = 0, koja može biti na loma pobude krug, zaostala magnetnog fluksa je F, a brzina rotacije stop postaje toliko visoka da se motor može mehanički uništene - ovaj fenomen se zove razmak motora.
Fizički fenomen razdvajanja zbog činjenice da je moment (1.2) za smanjenje magnetskog toka naizgled treba smanjiti, međutim, armature struja I = (U - E) / R I je znatno povećan, jer je smanjena E (1.1), a razlika U - E se u većoj meri povećava (obično E »0,9 U).
 Modovi kočnica.
Modovi kočnica.
Modovi kočenja motora odvijaju se kada elektromagnetni momenat koji razvija motor deluje protiv smera rotacije armature. Mogu se pojaviti tokom rada motora kada se uslovi rada mijenjaju ili stvaraju stvarno, kako bi se brzo smanjio brzina, zaustaviti ili obrnuti motor.
Paralelni motor za uzbunu ima tri načina kočenja: kočenje agregata sa povratkom snage na mrežu, kočenje pomoću suprotnog i dinamičkog kočenja.
Generator kočenje nastaje kada brzina armature n postaje veća od brzine rotacije za idealan (i.e., kada M = 0, itd) praznom x n (n\u003e n x). Prelazak na ovaj način način je motor moguće, na primjer, prilikom spuštanja tereta kada je moment u produkciji opterećenja, primjenjuju na armaturu u istom smjeru kao i elektromagnetskog momenta motora, i.e., kada obrtni momenat obrađuje prema elektromagnetnom momentu motora i dobija brzinu veću od n x. Ako je n\u003e nx, zatim E\u003e U c (gdje je U C - mrežni napon) i struja motora promjene potpisati (1.4) - elektromagnetska moment moment postaje kočnica i uređaja iz rad motora postaje energetski generator režim i transfere na mrežu ( energetski oporavak). Prelazak mašine iz motora u mod generatora ilustrovan je mehaničkom karakteristikom (slika 1.30). Pustite u pogonskom modu 1-radnu tačku; on odgovara trenutku M. Ako je povećana učestalost rotacije, radna tačka duž karakteristika kvadrant 1 do kvadrantu I nastavlja II, na primjer, u radnoj tački 2, što odgovara okretaja n i moment kočenja - M.
Kočenje opozicijapojavljuje se u pokretnom motoru kada se smer struje u armaturi ili struja ekscitacije prebace u suprotno. Elektromagnetni momenat menja znak i postaje inhibitoran.
Motor sa suprotnim pravcem rotacije odgovara mehaničkim karakteristikama koje se nalaze u kvadrantu II i III (na primjer, prirodna karakteristika 2 na slici 1.30).
Brzo prelazak na ovu karakteristiku je gotovo neprihvatljiv, jer je pratio preterano veliki strujni kočni moment. Iz tog razloga, istovremeno sa prebacivanjem jednog od namotaja u krug armature, dodan je dodatni otpor R ext, što ograničava struju armature.
Mehanička karakteristika režima sa R ext ima veliki nagib (ravna linija 3). Prilikom prelaska u opozicioni režim, brzina n se ne može promeniti u prvom trenutku (zbog inercije armature), a radna tačka sa pozicije a 1 prelazi na položaj a 3 na novoj karakteristici. Zbog izgleda torusa, brzina rotacije n će pasti brzo dok se radna tačka 3 ne ode u položaj a 4 koji odgovara zaustavljanju motora. Ako u ovom trenutku motor nije isključen iz izvora napajanja, armatura će promeniti pravac rotacije. Mašina će početi da radi u režimu vožnje novim pravcem rotacije, a njegova operativna tačka a 5 će biti na mehaničkoj karakteristici 3 u kvadrantu III.
 Dinamičan kočenjese javlja kada je armatura motora odvojena od mreže i zaključana na dinamički otpor kočenja R dt. Jednačina karakteristike (1.6) ima oblik:
Dinamičan kočenjese javlja kada je armatura motora odvojena od mreže i zaključana na dinamički otpor kočenja R dt. Jednačina karakteristike (1.6) ima oblik:
n = 
što odgovara porodici linija 4 (za različite R dt) koji prolaze kroz poreklo. Kada se prebacuje na ovaj režim, operativna tačka a 1 prelazi u jednu od karakteristika 4, na primer, do tačke a 6, a zatim se kreće duž pravougaone linije 4 na nulu. Motorna armatura se usporava do potpunog zaustavljanja. Promjenom otpornosti R dt, moguće je prilagoditi struju armature i brzinu usporavanja.
Motori direktne struje, u zavisnosti od načina njihovog uzimanja, kao što je već napomenuto, podeljeni su na motore sa nezavisnim, paralelno (šant), konzistentno (serijska) i mešovita (složena) ekscitacija.
Nezavisni motori uzbude, zahtevaju dva napajanja (Slika 11.9, a). Jedan od njih je potreban za nabavku namotaja armature (zaključci I1 i H2), a drugi - da stvori struju u lijevanju uzbude (navojne provodnike Š1 i Sh2). Dodatni otpor Rd u armaturi namotajnog kruga je neophodno za smanjenje udarna struja motor u trenutku uključivanja.
C nezavisno uzbuđenje najmoćniji elektromotori radi boljeg i ekonomičnog upravljanja strujom struje. Presek žice za namotavanje polja određuje se u zavisnosti od napona njegovog izvora napajanja. Karakteristika ovih mašina je nezavisnost struje ekscitacije i, prema tome, glavni magnetni fluks, od opterećenja na osovini motora.
Motori sa nezavisnim uzbuđenjem u svojim svojstvima skoro poklapaju sa motorima paralelnog uzimanja.
Paralelni pokretni motori uključeni su u skladu sa šemom prikazanom na slici 11.9, b. Stege I1 i H2obratite se namotaju armature i stezaljkama Š1 i Sh2 - do navijanja uzbude (do lijevog lanca). Varijable otpornosti Rd i Rvnamijenjeni su promjeni struje u namotaju armature i u polju navijanja, respektivno. Uzdužni navijanje ovog motora izveden je iz velikog broja obrtaja bakarna žica relativno mali poprečni presek i ima značajan otpor. To vam omogućava da ga povežete na pun napon mreže navedenu u pasošu.
Jedna od karakteristika ovakvih motora jeste da tokom njihovog rada zabranjeno je isključivanje navijanja uzbude iz sidrenog lanca. U suprotnom, kada se otvori navijanje ekscitacije, u njemu se pojavljuje neprihvatljiva EMF vrijednost, što može dovesti do otkaza motora i oštećenja osoblja za održavanje. Iz istog razloga, nemoguće je otvoriti navijanje uzbuđenja kada je motor isključen kada se njegova rotacija još nije zaustavila.
Sa rastućom brzinom, dodatni (dodatni) otpor Rd u krugu armature treba da se smanji i kada se postigne brzina stabilnog stanja, izlazi u potpunosti.



Fig.11.9. Vrste uzbuđenja DC mašina,
a - nezavisna ekscitacija, b - paralelno uzbuđenje,
c - uzastopno uzbuđenje, r - mešano uzbuđenje.
OVSH - shunt polje navijanje, SMF - pobudnog namotaja seriesnaya "DMS - nezavisne uzbude navijanje, Rd je komplementarna otpor u armaturu namotaja Rv- dodatnu otpornost na spoj polje navijanje.
Nema dodatnih otpora u armaturu navijanje u starter motora može izazvati veliku udarnu struju koja prelazi nazivne struje armature 10 ... 40 puta .
Važna osobina paralelnog motora za uzbunu je njegova praktična konstantna brzina kada se opterećenje na vratilu armature promijeni. Dakle, kada se opterećenje menja od praznog hodanja do nominalne vrednosti, brzina rotacije se smanjuje samo sa (2.. 8)% .
Druga karakteristika ovih motora je ekonomična kontrola brzine, u kojoj može biti odnos najveće brzine do najniže brzine 2:1 , i sa posebnim dizajnom motora - 6:1 . Minimalna brzina je ograničena zasićenja magnetskog kruga koji ne dozvoljava već da se poveća magnetnog fluksa mašine, a gornja brzina rotacije granica određena stabilnost mašine - sa znatnim slabljenjem magnetnog fluksa motor može ići "racing".
Motori serijske ekscitacije (serija) uključene su u skladu sa šemom, (Slika 11.9, c). Zaključci C1 i C2 odgovaraju serijskom (sekvencijalnom) navijanju uzbude. Izvodi se iz relativno malog broja okreta u uglavnom bakarnoj žici velikog poprečnog preseka. Namotavanje navoja je serijski povezano sa navojem armature. Dodatni otpor Rd u lancu armature i navoja ekscitacije omogućava smanjivanje startne struje i regulisanje brzine motora. Kada je motor uključen, mora imati vrednost kod koje će startna struja biti (1,5 ... 2,5) I n. Nakon što motor dostigne stabilnu brzinu, dodatni otpor Rd izlaz, tj. postavljen na nulu.
Ovi motori pri startovanju razvijaju velike startne momente i moraju se pokrenuti sa opterećenjem od najmanje 25% od njene nominalne vrijednosti. Motor se može uključiti sa manjom snagom na osovini i, još više, u režimu praznog hodanja nije dozvoljeno. Inače, motor može razviti neprihvatljivo visoku brzinu, što će uzrokovati njegov neuspjeh. Motori ove vrste se široko koriste u mehanizmima transporta i podizanja, u kojima je potrebno promeniti brzinu rotacije unutar širokih granica.
Motori mešovite eksitacije (spoj), zauzimaju srednju poziciju između motora paralelnog i sekvencijalnog uzimanja (slika 11.9, d). Njihov veliki afinitet za ovu ili onu vrstu zavisi od odnosa delova glavnog fluksa uzroka nastalog paralelnim ili sekvencijalnim navojem uzbude. Kada je motor uključen, dodatni otpor se dodaje na navoj armature kako bi se smanjila struja ulaska Rd. Ovaj motor ima dobre karakteristike vuče i može raditi u praznom hodu.
Direct (bezreostatanoe) uključivanje DC motora svih vrsta uzbude snage nije dozvoljeno više od jednog kilovata.
Oznaka DC mašina
Trenutno su najšire korišćene mašine DC serije generalne namjene 2P i najnoviju seriju 4P. Pored ove serije, motori se proizvode za dizalice, bagere, metalurške i druge pogone serije D. Izrađuju se motori i specijalizovane serije.
Serije motora 2P i 4Psu podijeljeni duž osi rotacije, kao što je uobičajeno za asinhronne motore naizmenična struja serije 4A. Serije mašina 2P imaju 11 dimenzija, različita po visini rotacije osi od 90 do 315 mm. Raspon kapaciteta mašina ove serije kreće se od 0,13 do 200 kW za elektromotore i od 0,37 do 180 kW za generatore. Motori serije 2P i 4P se izračunavaju za napon 110, 220, 340 i 440 V. Njihova ocijenio brzina rotacije su 750, 1000, 1500,2200 i 3000 okr / min.
Svaka od 11 dimenzija mašina iz serije 2P ima okvir od dve dužine (M i L).
Električne mašine serije 4P imaju najbolje tehničke i ekonomske pokazatelje u poređenju sa serijom 2P. intenzitet rada proizvodnih serija 4P u poređenju sa 2P smanjen za 2,5 ... 3 puta. Istovremeno, potrošnja bakra je smanjena za 25 ... 30%. Na brojnim funkcijama dizajna, uključujući metod hlađenja, zaštitu od vremenskih uticaja, upotrebu pojedinačnih delova i jedinica serije mašina 4P objedinjen sa asinhroni motori serije 4Ai AI .
Oznaka DC mašina (generatora i motora) je sledeća:
PH1H2HZH4,
gde 2P - serija DC mašina;
XI - izvršenje tipa zaštite: N - zaštićen self-ventilacijom, F - zaštićen sa nezavisnim ventilaciju, B - zatvoren sa prirodnim hlađenjem, O - zatvoren izvana sa puše ventilator;
X2 - visina osi rotacije (dvocifreni ili trocifreni broj) u mm;
HZ- konvencionalna dužina stora: M - prva, L - druga, G - sa tahogeneratorom;
Primer je oznaka motora 2PN112MGU - DC serije motora 2P, zaštićeno izvršenje pomoću samo-ventilacije H,112 visina osi rotacije u mm, prva veličina stora M, opremljen je tahogeneratorom D, koristi se za umerenu klimu Da.
Po kapacitetu, električne DC mašine se mogu uslovno podeliti u sledeće grupe:
Micromachines ........................... ... manje od 100 W,
Male mašine ........................... od 100 do 1000 W,
Mašine niske snage ............ .. od 1 do 10 kW,
Mašine srednje snage ......... .. od 10 do 100 kW,
Velike mašine ........................ .. od 100 do 1000 kW,
Mašine velike snage ......... više od 1000 kW.
Prema nominalnim naponima, električne mašine su konvencionalno podeljene na sledeći način:
Niski napon ................ Manje od 100 V,
Srednji napon ............. Od 100 do 1000 V,
Visoki napon ............... je veći od 1000V.
Brzinom DC mašine se može predstaviti kao:
Nisko brzina ................ Manje od 250 o / min,
Prosečna brzina ......... od 250 do 1000 o / min,
Visoka brzina ............. Od 1000 do 3000 o / min.
Superfast motori ... .. više od 3000 o / min.
Zadatak i metodologija rada.
1. Proučiti uređaj i svrhu pojedinačnih delova električnih mašina DC.
2. Utvrdite zaključke DC mašine koja se odnosi na namotavanje armature i na navijanje uzbude.
Zaključak koji odgovara određenoj namotaji može se odrediti megohmetrom, ommetrom ili uz pomoć sijalica. Kada koristite megger, jedan od njegovih krajeva je povezan sa jednim od provodnika namotaja, a drugi se alternativno dodiruje drugim. Izmereni otpor, jednak nuli, ukazuje na korespondenciju dva terminala jednog navoja.
3. Prepoznati navijanje armature i navijanje na elektrode. Odredite vrstu navoja polja (paralelno uzbuđenje ili serije).
Ovaj eksperiment se može izvesti pomoću električne žarulje, spojene u seriju sa namotajima DC napon treba hraniti glatko i postepeno napadu na određenu nominalnu vrijednost u pasošu mašina.
Uzimajući u obzir malu otpornost navoja armature i zavojnicu serijske ekscitacije, sijalica će se osvjetliti, a njihovi otpor mjereni pomoću megger (ili ohmmetra) biće praktično nula.
Sijalica koja je povezana u seriji sa paralelnim navojem uzbude će slabije osvetliti. Vrednost otpora paralelno sa navojem polja mora biti unutar 0,3 ... 0,5 kOhm .
Zaključci sidrenog navoja mogu se prepoznati postavljanjem jednog kraja megahmmera na četke, a dodirujući svoj drugi kraj na priključke namotaja na štitnici električnog uređaja.
Zaključci navoja električnih mašina treba navesti na uslovnoj etiketi zaključaka prikazanih u izvještaju.
 Izmerite otpor namotaja i otpor izolacije. Otpor namotaja se može meriti pomoću kola ampermetra i voltmetra. Otpor izolacije između namotaja i namotaja u odnosu na kućište proverava megahmetar procenjen na 1 kV. Otpor izolacije između namotaja armature i namotaja ekscitacije i između njih i kućišta ne sme biti niži 0,5 MΩ . Podaci iz mjerenja prikazani su u izvještaju.
Izmerite otpor namotaja i otpor izolacije. Otpor namotaja se može meriti pomoću kola ampermetra i voltmetra. Otpor izolacije između namotaja i namotaja u odnosu na kućište proverava megahmetar procenjen na 1 kV. Otpor izolacije između namotaja armature i namotaja ekscitacije i između njih i kućišta ne sme biti niži 0,5 MΩ . Podaci iz mjerenja prikazani su u izvještaju.
Da bi uslovno prikazali u poprečnom preseku glavne polove sa navojem uzbude i armaturu sa okretima navijanja, koji su pod polovima (kao na slici 11.10). Samostalno uzmite smer struje u navojima strujanja i armature. Navedite smer rotacije motora pod ovim uslovima.
Fig. 11.10. Dvopolna DC mašina:
1 - krevet; 2 - sidro; 3 - glavni polovi; 4 - navijanje ekscitacije; 5-polni saveti; 6 - navijanje armature; 7 - kolektor; F je glavni magnetni fluks; F je sila koja deluje na provodnike namotaja armature.
Kontrolisati pitanja i zadatke za samopripravu
1: Objasnite uređaj i princip rada motora i generator DC.
2. Objasnite svrhu kolektora DC mašina.
3. Dajte pojam podelu polova i dajte izraz za svoju definiciju.
4. Navesti glavne vrste namotaja koji se koriste u DC mašinama i znaju kako ih izvoditi.
5. Navedite glavne prednosti paralelnih motora za uzbunu.
6. Šta su karakteristike dizajna navijanje paralelnog uzimanja u odnosu na navijanje uzastopnog uzbuđenja?
7. Koja je karakteristika startnih DC motora serijske ekscitacije?
8. Koliko paralelnih grana ima jednostavnu talasnu i jednostavnu vezivanje navoja DC mašina?
9.Kako označavamo DC mašine? Dajte primer zapisa.
10.What vrednost je otpor izolacije između namotaja DC mašina i između namotaja i kućišta?
11. Koja vrijednost može struja doći u momentu pokretanja motora u odsustvu dodatnog otpora u sklopu namotaja armature?
12. Koja je vrednost startne struje motora?
13. U kojim slučajevima je dozvoljeno pokretanje DC motora bez dodatnog otpora u sklopu namotaja armature?
14. Zbog čega možete promijeniti emf generatora nezavisne eksitacije?
15. Koja je svrha dodatnih polova DC mašine?
16. Za koje opterećenja dozvoljen je serijski motor za uzbunu?
17. Kako je određena vrednost glavnog magnetnog fluksa?
18. Napišite izraze za emf generatora i obrtni moment motora. Dajte koncept konstitutivnih delova.
LABORATORIJSKI RAD 12.
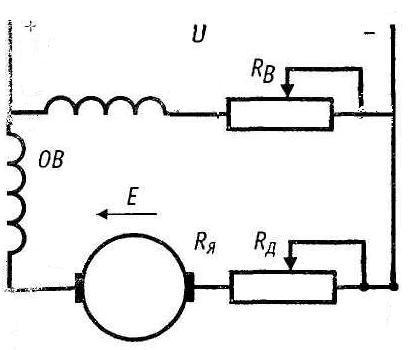
Postoji nekoliko mogućih verzija konstrukcije elata koji rade iz konstantnog izvora napona. Princip njihove akcije je isti, a razlike su u karakteristikama vezivanja navijanja uzbude (OB) i armature (I).
Njegovo ime je motor jednosmerne struje sa paralelnim uzbuđenjem, jer je njegovo navijanje I i OB na ovaj način povezano jedni sa drugima. Elektromotor ove vrste obezbeđuje neophodne modove, nadmašujući proizvode sekvencijalnih i mešanih tipova, kada je potrebna praktična konstantna brzina njegovog funkcionisanja.
- Zaključak
Izgradnja motora i njegovog područja primjene
Krug motora ovog tipa je prikazan ispod.
Iz ovoga sledi:
- ukupna struja izvući iz električnog izvora motor je I = I + sam B, gdje sam ja, ja B - struja kroz armature polje navijanje, odnosno;
- istovremeno I B ne zavisi od I Ja, to ne zavisi od opterećenja.
Princip električnog motora određuje njegove karakteristike vuče. Uređaj se primjenjuje kada je start-up ne zahtijeva daje veliki obrtni moment, koji je, kada je rad načina pogonskih mehanizama ne uključuju stvaranje velike početne opterećenja. Ovo je tipično za mašine i ventilatore.
U praktične svrhe, takvi korisni parametri vučenja takvih mehanizama kao što su
- stabilnost rada pod fluktuacijama opterećenja;
- visoka ekonomija zbog činjenice da ne propuštam OM.
Pokretanje sa nedovoljnim obrtnim momentom obezbeđuje se prebacivanjem na mešani tip kola.
Ponašanje elektromotora pod različitim opterećenjima
Mehanička karakteristika pokazuje stabilnost motora u širokom rasponu promjena opterećenja, opisuje zavisnost obrtnog momenta generiše E motora, brzina rada vratila.
Karakteristike vučenja mehanizma ovog tipa omogućavaju nam da zadržimo veliku obrtni momenat sa značajnom promjenom broja rotacija vratila. Tipično, parametri vučenja jedinice treba da obezbede redukciju ovog parametra za ne više od 5%. Jednostavna studija pokazuje: pokazatelji inhibicije zbog reverzibilnosti procesa su slični. Ove odredbe primjenjuju se i na slučaj mješovitog uzbuđenja.
Drugim rečima, za takav motor karakteristična je karakteristika. Ova vrsta posla smatra se važnom prednostom jedinice vrste koja se razmatra.
Varijante pristupa za kontrolu brzine
Princip rada paralelno uključivanje navijanje obezbeđuje glatko startovanje u kombinaciji sa velikim brojem promjena u broju osovina u procesu rada sa reostatima. Oni takođe obezbeđuju normalan pokretanje motora ograničavajući struju.
Za agregate paralelnog tipa, metode se koriste za kontrolu brzine rada menjanjem:
- magnetni tok glavnih polova;
- otpor sidrenog lanca;
- napon se primjenjuje na njega.
Cilj djelovanja je lijevanje uzbude, navijanje armature, njegov radni napon.
Promjena magnetskog fluksa se vrši preko serijskog otpornika R R. Kada povećava otpornost RH prolazi manje struje, što je praćeno smanjenjem magnetnog fluksa. Spoljna manifestacija ove akcije je povećanje broja okreta u idle. Studija pokazuje da postoji povećanje nagiba karakteristika.
Drugi princip se zasniva na uključivanju u lancu snabdevanja armature dodatnog reostatskog resekta. Pošto se otpor povećava, brzina rotacije I smanjuje, a njegova prirodna mehanička svojstva stiču veći nagib. Zbog serije vezu s glavnim navijanje reostatom dodatnu otpornost, koji rasipa značajnu snagu, tu je značajan pad u efikasnosti.
Treći princip je praćen izvesnom komplikacijom rešenja za kola i zahteva upotrebu zasebnog regulisanog izvora energije uz održavanje mogućnosti odvojene kontrole. U slučaju njegove primjene u stvarnim uslovima, moguće je samo smanjiti brzinu rotacije vratila.
Motor sa nezavisnom ekscitacijom
DC motor nezavisnog uzbuđenja ostvaruje treći pristup regulaciji i zanimljiv je u tome što se OV i M napajaju iz različitih izvora, a shema je predstavljena u nastavku.

Za motore u ovom utjelovljenje I u istom setu, a samo mijenja napon na M. je praćena promjena brzine vratila u stanju mirovanja, ali karakteristike krutost promjene ne prolaze.
Princip rada takvog agregata je komplikovaniji zbog nezavisnog funkcionisanja dva izvora. Međutim, njegova primena daje takve važne prednosti u praksi kao što su
- glatka, ekonomična kontrola radne brzine s velikom dubinom;
- startuje motor smanjenje napona bez reostata.
U slučaju da se start pojavi pri normalnom naponu, reostat ograničava vrednost I c.
Studija pokazuje da je maksimalna vrijednost broja obrtaja ograničena samo otporom M, a minimalnim uslovima za uklanjanje toplote proizvedene tokom rada.
Karakteristike u pogledu potrošnje energije i brzine odziva kontrolnog sistema poboljšane su u slučaju sekvencijalnog aktiviranja M različitih tiristorskih regulatora. Da bi se utvrdio broj rotacija vratila i njihova stabilizacija u procesu pokretanja različitih mehanizama, koriste se različite metode. Njihova zajednička karakteristika je uključivanje thyristor regulatora u krug frekventnih negativnih povratnih informacija. Pokretanje takvog agregata zahtijeva primjenu posebnih procedura.
Zaključak
Paralelni motor za uzbunu je veoma fleksibilan pogonski mehanizam i može se koristiti u veoma velikom broju područja gdje veliki momenti nisu potrebni prilikom startovanja. Ima jednostavne i pouzdane krugove za kontrolu brzine, lako je pokrenuti.
Namotavanje polja je povezano sa nezavisanim izvorima. Karakteristike motora su iste kao kod motora sa stalnim magnetima. Brzina rotacije kontroliše otpor u lancu armature. I to se podešava reostat (podešavanje otpora) u krugu igrališta navijanje, ali prekomjernog smanjenja njegove veličine ili u slučaju prekida armature trenutne povećava do opasne vrijednosti. Motori sa nezavisnom ekscitacijom se ne mogu pokrenuti u praznom hodu ili sa malim opterećenjem na vratilu. Brzina rotacije dramatično će se povećati i motor će se oštetiti.
Šema nezavisnog uzbuđenja
Druge šeme nazivaju se kola sa samosvjetom.
Paralelno uzbuđenje
Vijci rotor i ekscitacija su paralelno povezani sa jednim izvora napajanja. Sa ovim uključivanjem, struja preko navoja ekscitacije je nekoliko puta manja nego kroz rotor. Karakteristike elektromotora su teške, što im omogućava da se koriste za vožnju mašina, ventilatora.
Podešavanje brzine rotacije omogućeno je uključivanjem reostata u sklop rotor ili u seriji sa navojem uzbude.

Shema paralelnog uzimanja
Sekvencijalno uzbuđenje
Lijevanje uzbude je povezano u seriji sa sidrom, ista struja protiče kroz njih. Brzina ovakvog motora zavisi od opterećenja, ona se ne može uključiti na brzini rada u praznom hodu. Ali ima dobre početne karakteristike, tako da se kolo sa sekvencijalnim uzbuđenjem koristi na elektrificiranom transportu.

Sekvencijalni strujni krug
Mešano uzbuđenje
U ovoj šemi se koriste dva eksluciona zavojnica, koja se nalaze u parovima na svakom polu motora. Mogu se povezati tako da se njihovi tokovi ili sabiraju ili oduzimaju. Kao rezultat, motor može imati karakteristike kao kod serijskog ili paralelnog strujnog kola.
Shema mešovite eksitacije
Da promenite smer rotacije promenite polaritet jednog od navoja uzemljenja. Da bi kontrolisali pokretanje elektromotora i brzinu njegovog okretanja, prebacivanje stepena otpora
33. Karakteristike dpt sa nezavisnom ekscitacijom.
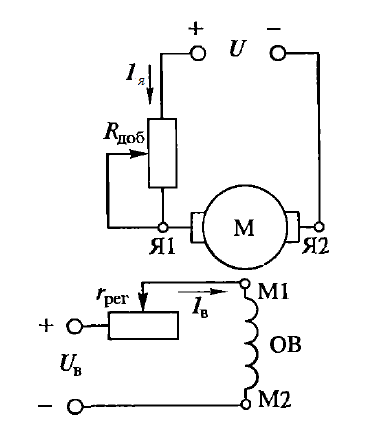
DC motor nezavisnog uzimanja (DWT HB) U ovom motoru (slika 1), namotavanje polja priključeno je na zasebno napajanje. Zavojnice kolo pobude uključeni podešavanje reostatom r reg, i sidreni lanac - produžetak (pokretač) otpornika R n. Karakteristična karakteristika DWT HB-a je njegova struja ekscitacije Ja sam nezavisno od struje armature Ja sam pošto je nabavka polja namotaja nezavisna.
Šema DC motora nezavisnog uzimanja (DWT HB)
 Slika 1
Slika 1
Mehanička karakteristika DC motora nezavisnog uzimanja (dpt nv)
Jednačina mehaničke karakteristike DC motora nezavisnog uzimanja ima oblik

gdje: n 0 - broj obrtaja motora u praznom hodu. Δn - promeni brzinu motora pod mehaničkim naprezanjem.
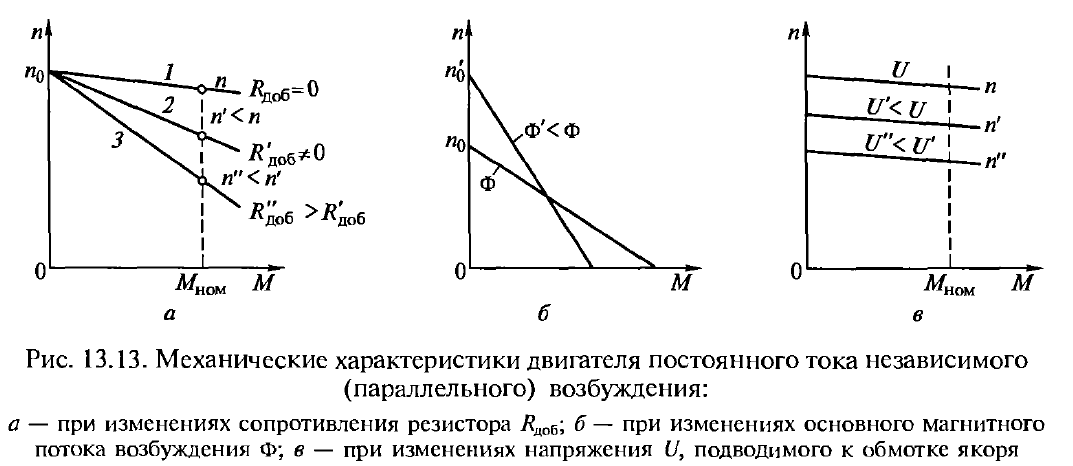
Iz ove jednadžbe proizlazi da mehaničke karakteristike motora posebno uzbuđeni DC (HB DTP) su ravne i seku osi ordinata u praznom hodu n 0 (slika 13.13 a) sa promjenom u brzini motora Δn, zbog promene mehaničkog opterećenja, proporcionalan je otpornosti sidrenog lanca R a = ΣR + R ext. Dakle, uz najmanje otpornost sidrenog lanca, R a = ΣR, kada R dodati = 0 , odgovara najmanju razliku brzine Δn. Istovremeno, mehanička karakteristika postaje kruta (grafikon 1).
Mehaničke karakteristike motora dobiti na nominalne napone na namotaja armature i uzbude i u odsustvu dodatnu otpornost na armaturu krug, pod nazivom prirodno (Slika 7).
Ako bar jedan ovih parametara motora se mijenja (napon preko namotaja armaturu ili pobude razlikuju od nominalne vrijednosti, ili modifikovani otpor armature u uvođenju R dodati), onda se nazivaju mehaničke karakteristike veštački.
Artificial mehaničke karakteristike, dobila uvođenjem dodatnih otpora R od armature kola ADD, koji se naziva i Reostat (grafikona 7, 2 i 3).
Prilikom procene prilagođavanja svojstava DC motora, mehanička svojstva su najvažnija n = f (M). Sa konstantnim opterećenjem obrtnog momenta na vratilu motora sa povećanom otpornošću otpornika R dodati brzina rotacije se smanjuje. Resistor Resistance R dodati da bi se dobila veštačka mehanička karakteristika koja odgovara potrebnoj brzini rotacije n na datom opterećenju (obično nominalnom) za nezavisne motore motora:

gde je U napon napajanja kola motora, V; I n je struja armature koja odgovara datom opterećenju motora, A; n - potrebna brzina, o / min; n 0 - brzina u praznom hodu, o / min.
Brzina praznog hoda n 0 je granična brzina, na kojoj višak motora ide u generatorski mod. Ova brzina prelazi nominalnu brzinu n nom u odnosu na nominalni napon U nom isporučen u krug armature prelazi EMF armature E Ja sam nom pri nominalnom opterećenju motora.

Na oblik mehaničkih karakteristika motora utiče magnituda glavnog fluksa magnetskog polja F. Kada se smanjuje F (Sa povećanjem otpora otpornika r ADJ) povećava brzinu praznog hoda motora n 0 i brzine diferencijal Δn. Ovo dovodi do značajne promjene u rigidnosti mehaničkih karakteristika motora (slika 13.13, b). Ako je promjena napona armature navijanje U (u stalnim R, i R lokal reg) je n promijenjen 0, a Δn ostaje netaknuta [vidjeti. (13.10)]. Kao rezultat toga, mehaničke karakteristike se pomeraju duž oštrine orijentacije, koje ostanu paralelne jedna drugoj (slika 13.13, c). Ovo stvara najpovoljnije uslove za regulisanje brzine motora promjenom napona U, isporučen lancu sidra. Ovakav način kontrole brzine je najrasprostranjeniji i zbog razvoja i široko rasprostranjena primjena kontroliranih napona tiristorski pretvarača.
Glava Deset DC MOTORI
§ 10-1. Opšte informacije o DC motorima
DC motori su naširoko koristi u industrijskim vozila i druge aplikacije koje zahtijevaju širok i laku kontrolu brzine rotacije (valjaonice, snažan alatnih strojeva, električne vuče na kamionu i tako dalje. D.).
Metodom uzimanja DC motori su podijeljeni slično generatorima u nezavisne, paralelne, sekvencijalne i mešovite motore.
Šeme motora i generatora sa ovom vrstom ekscitacije su isti (Slika 9-1). Kod nezavisnih motora uzbude, struje
sidra 1 ai opterećenja / su: / = 1 a,u motorima paralelnog i mešovitog uzimanja I = / a + /, i kod motora uzastopnog uzimanja I = 1 a= / in. Uz nezavisno uzbuđenje iz odvojenog izvora struje, moćni motori se obično izvode radi lakšeg i ekonomičnije regulacije
Slika 10-1 Energetski dijagram paralelnog motora za uzbunu
magnituda struje ekscitacije. Motori nezavisnog i paralelnog uzimanja u svojstvima su gotovo identični, pa stoga prvi navedeni nisu razmatrani odvojeno.
Energetski dijagramparalelnog motora za uzbunu prikazan je na Sl. 10-1. Primarna snaga P xelektrični i troši se iz mreže. Na račun ove moći gubici za uzbunu pc i električnih gubitaka su jednaki pda = P a Rau lancu armature, a preostali deo je elektromagnetna snaga armature P Em = EJ a,koji se pretvara u mehaničku snagu P mx. gubitak P magnetski mg, plus broj mehaničkih i p "x pokrivena mehaničke energije, dok je ostatak moć je koristan mehanički snaga motora P 2 na osovinu.
Slični energetski dijagrami koji ilustruju konverziju energije u motor se mogu konstruisati za druge tipove motora.
Jednačina obrtnog momenta. Elektromagnetni moment motora
koji vozi i deluje u smeru rotacije, troši se na balansiranje momenta kočenja: 1) trenutak M o,što odgovara gubicima p w,p d i p mx, pokriveni mehaničkom snagom [up. jednakost (9-6)]; 2) M v - trenutak učitavanja na osovini, stvoren od strane radne mašine ili mehanizma; 3) M ta- dinamičan trenutak [cf. jednakost (9-7)]. U ovom slučaju,
je statični trenutak otpora.
Kada je režim rada stabilan, kada n= const i stoga
U narednom slučaju, "em" indeks M Em će biti izostavljen. Obično M oje mala u poređenju sa M in,i stoga se može približno pretpostaviti da je u stalnom stanju M e "= Mto je koristan trenutak na vratilu i trenutno je izbalansiran M u.Takođe možete M ouključite na slici M u.
Ističemo da ako se izražavamo Pu ket,q - kroz broj obrtaja u minuti p n n,onda između R, p mi Mu kgs\u003e mpostojaće zavisnost
Jednačine napona i struje.U motorima, smjer djelovanja e. itd. sidra E anasuprot pravcu struje jačine I0 (vidi §1-1), i stoga E atakođe se zove counter-elektromotor

sila sidra. Jednačina napona za strujni krug motora može se napisati na sledeći način:
Ovde R a- impedancija sidrenog lanca [up. jednakost (9-15)]. U režimu motora uvek U>> E a.Iz (10-4) sledi
Brzina rotacije i mehaničke karakteristike.Rešavanje jednačine (10-4) zajedno sa (10-6) u odnosu na n,pronalazimo jednačinu karakteristike brzine n = f (I a)motor:
Odredili smo vrednost 1 ai zamenjujući ga u (10-7), dobijamo jednačinu mehaničke karakteristike n = f (M)motor:
koji određuje zavisnost brzine rotacije motora na razvijenom obrtnom momentu.
Tip mehaničke karakteristike n = f (M)ili M = f (n)at U= const zavisi od toga kako, sa promjenom opterećenja ili Mtok mašine Fe varira, i razlikuje se za motore sa na različite načine uzbuđenje. Isto važi za karakteristike brzine (vidi § 10-4 - 10-6).



§ 10-2. Početak DC motora
Prilikom pokretanja motora u toku kursa potrebno je: 1) osigurati odgovarajuću veličinu startnog momenta i uslove za postizanje potrebne brzine rotacije; 2) sprečiti pojavu prekomerne startne struje, što je opasno za motor.
Postoje tri načina za pokretanje motora: 1) direktno pokretanje, kada je lanac armature direktno povezan sa mrežom na svom punom naponu; 2) startovanje pomoću startnog reostatskog otpora ili startnog otpora, povezanog serijsko sa krugom armature; 3) počevši od smanjenog napona kruga armature.
Kada n= 0 takođe E a =0 i, prema izrazu (10-5),
L = U a / R a. (10-10)
U normalnim mašinama R a ^. -0,02-n 0,10, te stoga na direktnom početku U = U ustruja armature je neprihvatljivo velika:
/ v = (50h-10) / n.
Kao rezultat, direktno pokretanje primenjuje se samo za motore do nekoliko stotina vati, za koje R arelativno je velika i stoga na početku jasg (4 ■ * - 6) / n, a početni proces traje ne više od 1-2 sek.
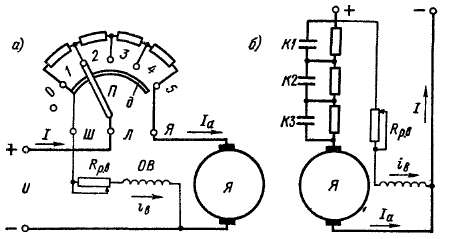
Najčešće se započinje startnim reostatima ili otporima za pokretanje (slika 10-2).
U ovom slučaju, umjesto (10-5), imamo
gde Rn- otpor startnog reostata ili otpočinjanje otpora. Vrednost Rnizabran je tako da u početnom trenutku lansiranja 1 a =(1.4-1.7) / n (u malim mašinama do (2.0-4.5) / n).
Razmotrimo detaljnije početak paralelnog motora uz pomoć reostata (Sl. 10-2, a).
Pre početka (t<; 0) подвижный контакт Ppočetnog reostata je u praznom kontaktu 0 i krug motora je otvoren. U početnom momentu početka rada (t= 0), pokretni kontakt H se prebacuje na kontakt / pomoću ručke, a struja / a, određena jednakošću (10-12), prolazi kroz armaturu. Cirkulacija za navijanje uzbude IApriključen na fiksni kontaktni luk d,na kojoj klizi

kontaktirajte I, tako da tokom startovanja krug struje uvek bude pod punom naponom. Ovo je neophodno da bi se i Bi Fv pri startovanju su bili maksimalni i konstantni, jer u ovom slučaju, prema izrazu (10-8), u datim vrednostima 1 arazvija
Slika 10-2 Shema pokretanja paralelnog motora uz pomoć startnog reostata (a)i startni otpor (b)
najveći trenutak M.Za istu svrhu, podešavanje reostata ekscitacije se postavlja kada se polazi u položaj R str c = 0.
Sa kontaktnim položajem I početnog reostata na kontaktu / (t= 0), pojavljuju se strujanja 1 ai B, kao i trenutak M,i ako M> Mst,onda će motor doći u rotaciju i brzinu nrastuće od n -0 (Slika 10-3). U ovom slučaju, emiter će biti primenjen od strane e. itd. Errni, prema izrazima (10-1J) i (10-8), 1 ai M,kao i stopu rasta nće se smanjiti. Promjena u ovim količinama za M st = const se javlja u skladu sa eksponencijalnim zakonom.
Kada 1 adostigne vrednost Nmin = (N - 1.3) / n, kontakt R početnog reostata se prebacuje na kontakt 2. Zbog smanjenja Rnstruja 1 azbog male induktivnosti lanca, armatura će se skoro odmah povećati, Mtakođe će se povećati, nraste brže i kao rezultat povećanja E amagnitude 1 ai Mopet će se smanjiti (Slika 10-3). Slično tome, proces startovanja se razvija kada se reostat prebaci na pozicije 3, 4 i 5, nakon čega motor dostiže režim rada u stalnom stanju sa vrijednostima f0 i n,određeni uslovima M = M "[Vidi par. Jednačine (10-7) i (10-8)].
Slika 10-3 Zavisnost 1 f Mi nod trenutka kada motor započne
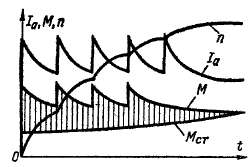
Kada započinje brzinu u praznom hodu M "= M o tome.Struja 1 a - 1 a0u ovom slučaju je mala i obično je 3-8% od / n.
Osenčena na sl. 10-3 ordinati predstavljaju, prema izrazu (10-2), vrednosti viška ili dinamičnog momenta
pod uticajem kojih se povećava n.
Broj stepena početnog reostata i vrijednost njihovih otpornosti se izračunavaju na takav način da se u odgovarajućim intervalima vremena prebacivanja stepena maksimalne i minimalne vrijednosti 1 au svim fazama su bili isti. Prema uslovima zagrevanja, reostatske faze su projektovane za kratkotrajne radove pod strujom.
Zaustavljanje motora se vrši isključivanjem iz mreže sa prekidačem ili drugim prekidačem. Krug na Fig. 10-2 je dizajniran tako da kada je motor isključen, krug namotaja polja se ne otvara, ali ostaje zatvoren kroz armaturu. U ovom slučaju, struja u lijevanju uzimanja nakon isključivanja motora se smanjuje na nulu trenutno, ali sa dovoljno velikom vremenskom konstantom. Zbog toga je sprečena indukcija u navijanju ekscitacije velikih e. itd. samoindukciju, koja može oštetiti izolaciju ovog namotaja.
Takođe je izmenjen u odnosu na sl. 10-2, astartni reostati bez kontaktnog luka e.Kraj strujnog kola može se, na primer, povezati sa kontaktom 2, i kada se motor pokreće u seriji sa navojem uzbude, uključiće se i poslednje faze startnog reostata. Od otpornosti u poređenju sa R B= r B + R str B je mali, ovo nema velikog uticaja na performanse motora.
Automatsko prebacivanje početnog reostata je neugodno. Stoga, u automatizovanim instalacijama, koriste se početni otpornici umesto početnog reostata (slike 10-2, b),koje naizmjenično shunjuju kontakti Kl, K2, KZautomatski radni kontaktori. Da bi se pojednostavila shema i smanjio broj uređaja, pretpostavlja se da je broj koraka minimalan (za motore niske snage, obično 1-2 koraka).
Ni pod kojim okolnostima ne bi trebalo prekinuti lanac paralelnog uzimanja.
U ovom slučaju, strujni tok ne nestaje odmah, već se održava strujnim strujama indukovanim u jaram. Međutim, ovaj tok će brzo smanjivati i brzinu n,prema izrazu (10-7), značajno će se povećati ("razmak" motora). Kao rezultat, struja armature značajno će se povećati i kružno
stoga je moguće oštećenje mašine, a samim tim, posebno u osiguračkim krugovima ne nalaze se osigurači i prekidači.
Ograničenje startne struje takođe se postiže u slučaju napajanja kruga armature kada se pokreće od posebnog izvora struje sa podesivim naponom (odvojeni generator jednosmerne struje, kontrolni ispravljač). Paralelno uzdužni navoj mora biti napajan iz drugog izvora, sa punim naponom, kako bi se imala ukupna struja r na početku. Ovaj metod startovanja se najčešće koristi za moćne motore iu kombinaciji sa regulacijom brzine (vidi § 10-4).
Motori serijskog i mešovitog uzbuđenja započinju se na isti način. Shema za pokretanje motora mešovitog uzimanja se ne razlikuje od startnog kruga paralelnog motora za uzbunu (Slika 10-2), a početni krug sekvencijalnog motora za uzbunu je pojednostavljen eliminacijom paralelnog kola uzbude.
Da biste promenili smer rotacije (preokret) motora, neophodno je promeniti trenutni pravac u armaturi (zajedno sadodatni stubovi i navoj kompenzacije) ili unavijanje (navijanje) uzbuđenje.
§ 10-3. Kontrola brzine i stabilnost motora
Metode regulisanja brzine rotacije motorastrujapratite iz odnosa " (10-7) i (10-9). Postoje tri načina kontrole brzine rotacije.
1. Najprikladniji, široko rasprostranjen i ekonomičan metod je regulacija brzine promjenom fluksa F 6, tj. Struje ekscitacije t B.
Sa smanjenjem Fa, prema ekspresiji (10-7), brzina se povećava. Motori se izračunavaju za rad u nominalnom režimu sa najvećom vrijednošću Fe, tj. Sa najmanjom vrijednošću n.Dakle, praktično možete smanjiti samo ^.
Shodno tome, predmetna metoda vam omogućava da podesite brzinu nagore sa nominalne brzine. Sa ovim prilagođavanjem, efikasnost motora ostaje velika, pošto je snaga uzbude niska, naročito niska snaga reostata za regulisanje struje ekscitacije. Pored toga, sa smanjenjem i Bsnaga uzbude je smanjena.
Gornja granica kontrole brzine ograničena je mehaničkom čvrstinom mašine i njegovim uslovima preklapanja.
Kod velikih brzina, komutacija se pogoršava zbog povećane vibracije aparata za četkice, nestabilnosti kontakta četke i povećanja reaktivne snage. d. e, kao i zbog povećanja maksimalni napon između kolektora ploča kao rezultat slabljenja baze na terenu i na taj način poboljšati iskrivljujući učinak poprečne armature reakcije (vidi. § 5-3).
Da povećate regulacioni opseg noslobađanjem polja u mašinama malih i srednjih snaga sa namotavanjem talasne armature, ponekad se koristi odvojeno hranjenje navojačkih navoja pojedinih polova. U ovom slučaju zadržava se jedna grupa polova i B= const i veliki fluks sa značajnom zasićenjem segmenata magnetnog kola, au drugoj grupi polova t B i smanjenjem fluksa. Iskrivljavajući efekat transverzalne reakcije armature pod prvom grupom polova u ovom slučaju će se manifestovati mnogo slabijim. Pošto u talasnom talasu napon između susednih kolektorskih ploča sastoji se od e. itd. sekcije p uređen po svim polovima (vidi. § 3-5), rezultat tih propisa između ploča će biti više uniformu distribuciju polova stresa toka.
2. Drugi način kontrole brzine je da se serijski pretvara u sidreni lanac reostat ili podesivi otpor R pa,
Umjesto (10-7) imamo

to jest, u reostatici će se izgubiti 47,5% primjenjenog napona i iste snage koja se primjenjuje na armaturu. Iz tog razloga
ovaj metod se uglavnom koristi za motore niske snage, a za snažnije motore retko se koristi i samo za kratko vreme (start-up i podešavanje, itd.).
3. Regulacija brzine se vrši i podešavanjem napona kruga armature. Od rada motora U> U Hneprihvatljivo je, onda proces prema izrazima (10-7) i (10-9), omogućava da se prilagode brzinu i niz od nominalne. Efikasnost motora ostaje velika, jer u motorni krug nisu uvedeni dodatni izvori gubitaka.
Međutim, u ovom slučaju je potreban poseban izvor struje sa podesivim naponom, što povećava troškove instalacije.
Imajte na umu da regulacija brzine promjenjuje 1 anemoguće, iako takva mogućnost na prvi pogled slijedi "iz jednadžbe. (10-7). Činjenica da je, prema jednačini (10-3), brzina rotacije motora na svakom mora razviti određene tačke M,jednak trenutkom otpornosti pogonskog mehanizma M "u datoj vrednosti n.Međutim, u skladu sa izrazom (10-8) za dato vrijednost F 6, količina 1 au motoru će biti na svakoj vrednosti Mtakođe sasvim sigurno.
Različite metode regulacije npogotovo u pogledu motora sa različitim metodama uzbude; razmatraju se u narednim odeljcima.
Uslovi za stabilnost motora.Kada je motor uvijek se javljaju neki poremećaj rada (kratkoročne fluktuacije u naponu napajanja, slučajni kratkoročne promjene moment na osovini utovar i m. D.). Takvi poremećaji su najčešće mala i kratkotrajna, međutim, kada se to dogodi, ali i mala i kratka, povreda ravnopravnosti trenutaka u stabilnom stanju rada [vidjeti. izraz (10-3)], zbog čega se pojavljuje trenutak M wi brzina rotacije se menja.
Do stabilnost motora znači da je mogućnost da se vrate na prvobitni stabilnom stanju rad u malim poremećaja njegovog rada, kada je efekat ovih poremećaja prestala. Drugim riječima, rad motora je rekao da je stabilan ako beskrajno granica u svom radu perturbacija izazvati samo male varijacije kao količina koja karakteriše njegov rad (npr brzina rotacije, armature struje, i tako dalje. D.). Motor je nestabilan u radu, ako takva mala perturbacija dovode do velikih promena u režimu rada. Kod nestabilnog rada, kratkotrajni poremećaji izazivaju ili neprekidnu promenu

rezim (n, I aitd.) u bilo kom smeru, ili dovesti do oscilatornog načina rada sa povećanjem amplitude oscilovanja n, 1 ai tako dalje. Naravno, u uslovima rada potrebno je osigurati stabilan način rada motora. Ako je motor nestabilan, njeno normalno funkcionisanje nije moguće, a obično se javlja nesreća.
Nestabilan rad je takođe moguć sa generatorima. U §§ 9-7 razmatrali smo nestabilnost paralelne operacije generatora mešovitog uzimanja u odsustvu izjednačavajućeg žica. Način self-ekscitacije DC generatora (vidi § 9-4) takođe je u osnovi nestabilan način rada, pošto i Bi Ukontinuirano se menja. Rad paralelnog generatora pobuđivanja R s= R B. Kptakođe je nestabilna, jer ako nešto promenimo vrednost R B,onda napetost Uznačajno će se promeniti, odnosno povećati se do neke konačne vrednosti, ili će skoro pasti na nulu.
Stabilnost motora zavisi od vrste njegovih mehaničkih karakteristika M= f (n)i na obliku zavisnosti od trenutka otpornosti na vratilo na brzini rotacije M st = f (s) Oblik ove poslednje zavisnosti određuju osobine radne mašine koju pogoni motor. Na primer, u mašinama za sečenje metala, ako se podešavanje alata ne menja, M "da const, t.j. Mst ne zavisi od brzine rotacije, a za ventilatore i pumpe M "~ n 2.
Na sl. 10-4, i ja bihprikazana su dva tipična slučaja rada motora. Stalni način rada (M= M ")sa brzinom rotacije n 0odgovara preseku ove dve karakteristike.
Ako zavisnosti M = f (n)i M st = / (n)imaju oblik prikazan na Sl. 10-4, a,onda sa povremenim povećanjem nkao rezultat uznemiravanja na Anu, kočni moment M cgpostati više M (M st> M)i stoga će se motor usporiti, što će dovesti do toga da se rotor vrati na početnu brzinu n 0.Slično tome, ako se, kao rezultat perturbacije, brzina motora smanji za An,to će biti M "< M,pa će rotor ubrzati i ponovo n= n 0.Tako, u razmatranom
Fig. 10-4. Stabilni (a) i nestabilni (b) načini rada motora
slučaj je stabilan. Iz Sl. 10-4, a,u ovom slučaju
što je znak ili kriterijum stabilnosti motora.
Sa zavisnostima M = f(n) i Mst= f (n) oblika sl. 10-4, bposao je nestabilan. Zaista, s povećanjem nod n= n 0do n= n 0+ Biće M\u003e M st, postojaće višak okretnog momenta vožnje, brzina nće početi da se povećava i prekomerni trenutak M- UI ST će povećati još više, nčak i više itd. Ako, kao rezultat uznemiravanja n = n 0- An, onda M< М сг и п будет непрерывно уменьшаться. Поэтому работа в точке M= Msti n = n 0je nemoguće. Iz Sl. 10-4, b,u ovom slučaju
što je znak nestabilnosti motora.
Iz gore navedenog proizilazi da je motor sa ovom mehaničkom karakteristikom M = f (n)mogu raditi stabilno ili nestabilno u zavisnosti od karakteristika Mst= / (n)radna mašina. Pojava nestabilnosti najverovatnije je sa takvim mehaničkim karakteristikama motora M = f (n)ili n = f (M),kada se Mig povećava ili smanjuje istovremeno (Slika 10-4, b). Konkretno, u ovom slučaju rad je nestabilan za Mst = f (s) = const (na primjer, mašine za sečenje metala). Dakle, motori sa takvim mehaničkim karakteristikama nisu izgrađeni.
Prethodno se podjednako odnosi na stabilnost motora za DC i AC, kao i svih vrsta motora.
Promenite režim rada.Motori sa jednosmernim strujama, kao alternativno, AC motori, imaju izuzetnu sposobnost automatski, bez vanjskog regulatornog utjecaja, da se prilagode promenjenim uslovima rada kada se poštuju uslovi stabilnosti. U tom smislu možemo reći da elektromotori imaju svojstvo samoregulacije. Hajde da ovo ilustrujemo primjerom paralelnog motora za uzbunu.
Pretpostavimo da takav motor radi U =const, i e =const i, posledično, Fv «const i momenta učitavanja M ",razvijen od strane radne mašine, sve više. Zatim M< M zr,pojavljuje se M tn< 0 [см. выражение (10-2)] и npočinje da se smanjuje


hatsya. Ali to će takođe smanjiti E a,struja 1 a[Vidi par. izraz (10-5)] i trenutak MGsm. ekspresija (10-8)] će početi da se povećava, a to će se desiti sve dok se ne pojavi balans momenta M= M ".Režim se takođe menja na sličan način, ako M "smanjuje, iu ovom slučaju ja i E aće početi da se povećava, i 1 ai M- Smanjite dok ne bude ponovo M =Mst i M mw =0.
Pretpostavimo da sada uz pomoć reostata R str u (vidi Sliku 10-2) napravljeno je smanjenje i B.U ovom slučaju, FV će se smanjiti, međutim, zbog mehaničke inercije rotora, brzine nu prvom trenutku se neće promeniti. Zatim, prema izrazu (10-6), E asmanjuje i kao rezultat 1 ai Mće se povećati [cf. izrazi (10-5) i (10-8). Biće M\u003e M ", u skladu sa jednakost (10-2) Mmin\u003e 0 i brzinom npočinje da se povećava. To će se, prema istim odnosima, povećati E ai smanjiti 1 ai Msve dok se balans momaka ne postigne M == M "i Mdin = 0 (Slika 10-5). Sa povećanjem i Bfenomeni se razvijaju u suprotnom smeru. Treba istaći drastične promjene i Bna regulaciji je nemoguće priznati, kao Ui E a[Vidi par. izraz (10-5)] su bliske vrednosti i mala promjena u Fv i E adovodi do velikih promena u a i M.
Slično tome, postoji prelazak na novi režim kada se promene drugi spoljni uslovi (na primjer, uvođenje otpora u lanac sidra itd.), Kao iu motorima s drugim metodama uzbude.
Iz gore navedenog proizlazi da je ponašanje motora pod uslovima stabilnog stanja i prelazima u novi radni režim u potpunosti određeno jednačinama momenta ravnoteže (10-2) i napona kruga armature (10-4).
§ 10-4. Paralelni pokretni motori
Prirodna brzina i mehaničke karakteristike.Razmotrimo detaljnije karakteristike paralelnog motora za uzbunu, koji određuju njegove operativne osobine.
Brzina i mehaničke karakteristike motora određuju se jednakosti (10-7) i (10-9) at U =const i i B =const. U odsustvu dodatnog otpora u lancu sidra, ove karakteristike se nazivaju prirodnim.
Fig. 10-5. Prelazak motora
paralelno uzbuđenje
za novi način rada
smanjenje protoka

Ako su četke na geometrijskom neutralnom, sa povećanjem 1 afluks FA će smanjiti donekle zbog efekta transverzalne reakcije armature. Kao rezultat, brzina n,prema izrazu (10-7), imaće tendenciju da se poveća. S druge strane, pad napona R a I auzrokuje smanjenje brzine. Prema tome, moguća su tri tipa brzinskih karakteristika, prikazanih na Sl. 10-6; 1 - sa prevladavanjem uticaja RJ a \\ 2- uz obostranu nadoknadu uticaja RJ ai smanjenje F 6; 3 - sa prevladavanjem efekta smanjenja Fa.
S obzirom na to da je varijacija $ relativno mala, mehaničke karakteristike n = f (M)paralelni motor za uzbunu,
određeni jednakošću (10-9), sa U= const i r = const se podudaraju u obliku sa karakteristikama n = f (I a)(Slika 10-6). Iz istog razloga, ove karakteristike su skoro pravilne.
Karakteristike specifikacije 3 (Slike 10-6) su neprihvatljivi uslovi stabilnosti rada (vidi § 10-3). Dakle, motori paralelnog uzimanja izrađuju se sa blago pada karakteristika oblika / (Slika 10-6). U savremenim mašinama visokog prečišćavanja, zahvaljujući prilično jakoj zasićenosti sidrenih zuba, efekat reakcije poprečne armature može biti toliko velik da je nemoguće dobiti karakteristiku oblika / (Slika 10-6). Zatim, kako bi se dobila takva karakteristika, slabi uzastopni navijanje saglasne ekscitacije se postavlja na polove, n. sa. što je do 10% od n. sa. paralelno sa navijanjem uzbude. U ovom slučaju, smanjenje FB-a pod dejstvom transverzalne reakcije armature je delimično ili potpuno kompenzirano. Ovakav sekvencijalni navoj navođenja naziva se stabilizacijom, a motor sa takvim navojem se i dalje zove paralelni motor za uzbunu.
Promena brzine rotacije An (Slika 10-6) prilikom kretanja u praznom hodu (/ "= 1 a0)do nominalnog opterećenja (1 a-1 au)motor paralelnog uzimanja kada radi na prirodnoj karakteristici je mali i iznosi 2-8% n.Takve karakteristike slabog pada nazivaju se rigidnim. Paralelni motori uzbuđenja sa krutim karakteristikama koriste se u instalacijama u kojima je potrebno da se brzina rotacije sa promenom opterećenja održava približno konstantna (mašine za sečenje metala, itd.).
Fig. 10-6. Tipovi prirodne brzine i mehaničke karakteristike paralelnog motora
Kontrola brzine ublažava magnettokobično se vrši uz pomoć reostata u krugu strujanja /? p (vidi sliku 9-1, b, 10-2). Ako u lancu armature nema dodatnog otpora (R pa= 0) i U =const karakteristike n - \\ (1 a)i n= / (M), definisani jednakostima (10-7) i (10-9), za različite vrednosti R ps, i Bili Φα imaju oblik prikazan na Sl. 10-7. Sve karakteristike n = f (I a)konvergira se na abscisiji (n= 0) u generičkoj tački za vrlo visoku struju 1 a,što je, prema izrazu (10-5), jednako

Fig. 10-7. Mehaničke i brzinske karakteristike paralelnog motora za uzbunu za različite tokove ekscitacije
Ia = U / R a.
Međutim, mehaničke karakteristike prelaze osa abscisa u različitim tačkama.
Donja karakteristika na Sl. 10-7 odgovara nominalnom protoku. Vrednosti nu režimu rada u stalnom stanju odgovaraju tačkama preseka karakteristika koje se razmatraju sa krivom Mst = f (n)za radnu mašinu povezanu na motor (isprekidana linija na slici 10-7).
Motorna prazna tačka (M= M o, 1 a= / a0) leži donekle desno od osovine ordinata na Sl. 10-7. Sa povećanom brzinom rotacije nzbog povećanih mehaničkih gubitaka M oi 1 a0takođe se povećava. Ako u ovom režimu, pomoću spoljašnjeg primjenjenog momenta, počinje da povećava brzinu rotacije n,onda E a[Vidi par. izraz (10-6)] će se povećati i 1 ai Mće se, prema jednačinama (10-5) i (10-8), smanjiti. Kada 1 a= 0 i M= 0, mehanički i magnetni gubici motora pokriveni su mehaničkom snagom koja se isporučuje za osovinu, a uz dalje povećanje brzine I0 i Mće promeniti znak, a motor će ići u generatorski način rada (dijelovi karakteristika na slici 10-7 levo od osovine ordinata).
Motori opće primjene omogućiti uvjete komutaciju kontrolu na terenu brzine slabljenje u rasponu od 1: 2, i proizvoditi motore s promjenjivom brzinom način u rasponu do 1: 5 ili čak 1: 8, ali u ovom slučaju ograničiti maksimalni napon između kolektora ploče (pogledajte (Pogledajte §5-3), neophodno je povećati vazdušni jastuk, regulisati protok po posebnim grupama polova (vidi § 10-3) ili primijeniti nadoknadu namotaja. Cena motora se povećava.
Kontrola brzine otpornosti u krugu armature, veštačke mehaničke i brzinske karakteristike. Ako je dodatni otpor priključen serijski na krug armature R pa(Slika 10-8, a), tada umjesto izraza (10-7) i (10-9) dobijamo

Otpor R pamože biti podesiva i mora biti dizajnirana za dugotrajan rad. Kolo za uzbunu mora biti uključeno na mrežni napon.

Fig. 10-8. Šema za kontrolu brzine rotacije paralelnog motora uz pomoć otpora u krugu armature (a) i odgovarajućih mehaničkih i brzinskih karakteristika (b)
Karakteristike n - f (M)i n = f (I a)za različite vrednosti R pg = const kada U -const i i B =const su prikazane na Sl. 10-8, b (Rpai< Rpaz< ^ р оз)- Верхняя характеристика (R pa= 0) je prirodno. Svaka od karakteristika presjeđuje abscisu (n -0) u tački c
Proširenja ovih karakteristika ispod osovine abscisa na sl. 10-8 odgovara kočenju motora od strane opozicije. U ovom slučaju n< 0, э. д. с. E aima suprotan znak i dodaje se naponu mreže U,zbog čega
i obrtnog momenta motora Mdjeluje protiv smera rotacije i stoga se retardira.
Ako ste u režimu praznog hodanja (1 a = 1 n0)pomoću vanjskog primjenjenog momenta, počnite da povećate brzinu rotacije, a zatim režim 1 a =0, a zatim 1 aće promeniti pravac i mašina će ići u generatorski mod (karakteristične sekcije na slikama 10-8, blevo od koordinatne ose).
Kao što se vidi iz Sl. 10-8, b,kada je omogućeno R pakarakteristike postaju manje krute i za velike vrednosti R pa- strmog padanja ili mekog.
Ako je krivina momenta otpornosti M st = / (n)ima oblik prikazan na Sl. 10-8, bisprekidana linija, vrijednosti nu stalnom stanju za svaku vrijednost R pa

Slika 10-9 Dijagram sklopa generator-motora za regulisanje brzine nezavisnog motora za uzbunu
su određene tačkama preseka odgovarajućih krivina. Što više R pa,manje ni ispod faktora efikasnosti.
Regulacija brzine promenom naponasidramože se obaviti uz pomoć agregata generatora (GD), takođe nazvanog agregat Leonard (Slika 10-9). U ovom slučaju, glavni pokretač PD(naizmenična struja, unutrašnje sagorijevanje itd.) rotira sa konstantnom brzinom generatora jednosmerne struje G.Armature generatora direktno su priključene na armaturu DC motora D,koji služi kao pogon radne mašine RM.Navijalci uzbude generatora VHFi motor ATSse napajaju iz nezavisnog izvora - DC mreže (Slika 10-9) ili od patogena (mali DC generatori) na osovini primarnog motora PD.Regulacija struje ekscitacije generatora t B g treba napraviti praktično nula (na slici 10-9 pomoću reostata uključenog potenciometrijskim krugom). Ako je potrebno obrnuti motor, polaritet generatora mora biti promenjen (na slici 10-9 sa prekidačem I).
Započnite motor Da kontrola njegove brzine vrši se na sledeći način. Najviše r u g i r pri r = 0, počinje primarni motor PD.Zatim se postepeno povećava i g g, i sa malim naponom generatora Umotor Ddolazi u rotaciju. Regulisanjem, dalje, Uunutar U = * U H,svaki motor je ubrzan n= i n. Dalje povećanje nmoguće smanjenjem t B e. Da biste preokrenuli motor, smanjite t B g na nulu, prebacite VHFi ponovo se povećava i B m vrijednosti i B r = 0.
Kada se radi uređaj stvara oštro pulsirajuće opterećenje (npr neki mlinovi) i poželjno vršnog opterećenja potpuno prošli glavni pokretač ili AC mrežu, motor Dmože biti opremljen sa zamajčem (jedinica GDM, ili jedinica Leonhard-Ilgner). U ovom slučaju, kada ntokom vrha opterećenog dela ovog tereta pokrivena je kinetičkom energijom zamajca. Efikasnost zamajca će biti veća sa mekšim performansama motora PDili D.
Nedavno je sve češće motor PDi generator Dzamenjuju se žičanim ili poluprovodničkim ispravljačem sa podesivim naponom. U ovom slučaju, agregat koji se razmatra takođe se naziva gate (jonskim, tiristorskim) izlazom.
Gore navedene jedinice se koriste, ako je potrebno podešavanjem brzine motora sa visokom efikasnošću u širokim granicama - do 1: ... još 10 minuta (veliki alatnih strojeva, valjaonice, itd ...).
Imajte na umu da je promjena Uradi regulisanja nprema šemi na Sl. 9-1, 0> i 10-8, ane daje željene rezultate, jer istovremeno s promenom napona lanca armature varira proporcionalno Utakođe struja ekscitacije. Od regulacije Vmože se vršiti samo od vrednosti U - U Kmagnetni krug će uskoro biti nezasićen, Ui t e će se razlikovati u srazmernosti jedni s drugima. Prema raveevstvu (10-7), ndok se ne menja značajno.
Nedavno se tzv. Regulacija impulsa stacionarnih motora sve više i više širi, dok se kola armature motora napaja iz izvora lemljene struje sa konstantni napon kroz tiristore, koji, periodično, sa frekvencijom 1000-HW hzuključen "i isključivanje. To Smooth pravo", to kriva armature struja na svom terminalima povezan kondenzatora. napon na terminalima sidra u ovom slučaju, je praktično konstantan i proporcionalan odnos vremena od tiristora u vremenu-Nastaviti-teldasti ciklusa. Dakle, pulsirajuće metoda dozvolite
daigatelya žele da pokrenu regulisati brzinu rotacije kada napajanje iz izvora bilježi konstantan napon u širokom rasponu bez Reostat u armaturu kola i značajno bez dodatnih gubitaka. Na isti način, bez startnog reostata i bez dodatnih gubitaka, motor se može pokrenuti.
Pulsni postupak kontrole je ekonomski veoma povoljan za kontrolu motora koji rade u promenljivim brzinama, sa čestim započinjanjem, na primjer, na elektrificiranom transportu.
Karakteristike performansipredstavljaju zavisnost potrošnje energije Rʺʺ< trenutna potrošnja, brzina n,trenutak Mi efikasnost struje sa korisne snage P 2at U= const i nepromenjene pozicije regulacionih reostata. Karakteristike performansi paralelnog pogonskog motora
Fig. 10-10. Karakteristike performansi
paralelni motor za uzbunu
P a= 10 ket, U H =220 in,"N =
950 rpm
snaga u odsustvu dodatnog otpora u lancu armature je prikazana na Sl. 10-10.
Istovremeno s povećanjem snage na osovini P 2, obrtni moment na osovini M.S obzirom da se povećava P%i Mbrzina ntada pada M= P 2 / strraste nešto brže P 2.Povećajte P 2i M,prirodno, prati povećanje struje motora /. Potrošnja energije iz mreže takođe se povećava proporcionalno / RKada je u hodu (P 2 = 0), efikasnost centri= 0, zatim sa povećanjem P 2na početku centriraste brzo, ali pri visokim opterećenjima zbog velikog porasta gubitaka u lancu armature r \\opet počinje da se smanjuje.
§ 10-5. Motori serijske ekscitacije
Prirodna brzina i mehaničke karakteristike, okoaplikacija.U serijskim pogonima struja armatura je istovremeno i struja ekscitacije: r = 1 a= /. Prema tome, protok Φα varira u širokom opsegu, i to možemo da napišemo
Φ 6 = ξ φ /. (10-18)
Koeficijent proporcionalnosti φ u značajnom opsegu opterećenja,< / н, является практически постоянным, и лишь

na /\u003e (0,8 n-0,9) / n usled zasićenja magnetnog kola kfpočinje da se smanjuje.
Kada se koristi omjer (10-18) za seriju uzbude motor umjesto izraza (10-7), (10-9) i (10-8), dobijamo
Karakteristika brzine motora izraz (10-19)), prikazan na Sl. 10-11, je mekan i ima hiperbolični karakter. Za k = const, oblik krive n - f(/) prikazuje isprekidana linija. Kod niske /, brzina motora postaje neprihvatljivo velika. Stoga, rad motora za sekvencijalno uzbuđenje, izuzev najmanjih, nije dozvoljeno da radi u praznom hodu, a korišćenje prenosnog pojasa je neprihvatljivo. Obično je minimalno dozvoljeno opterećenje P 2 =(0,2-0,25) P n.
Prirodna mehanička karakteristika sekvencijalnog motora za uzbunu n= / (M)u skladu sa odnosom (10-20) prikazan je na Sl. 10-13 (kriva 1).
Od paralelnih motora za uzbunu M^ /, dok za uzastopne motore uzimanja M ~ l! i kada je startovanje dozvoljeno / = (1,5-2,0) / n, serije ekscitacionih motora razvijaju znatno veći početni obrtni momenat u poređenju sa paralelnim motorima uzbude. Osim toga, paralelni motori za uzbunu nra const, dok je serija uzbude motora, prema izrazima (10-19) i (10-20), neki (na R a =0)
Pirinač 10-11. Karakteristika prirodne brzine za sekvencijalni motor za uzbunu



i za serijske pogone motora
P 2 = 2nnM ~ VM.
Tako, u motorima serijske ekscitacije sa promjenom u momentu opterećenja, Mst = M inu širokom rasponu, snaga varira manje od paralelnih motora.
Stoga, za motore serijske ekscitacije, preopterećenja obrtnim momentom su manje opasne. U tom smislu, motori serijske ekscitacije imaju značajne prednosti u slučaju teških startnih uslova i promjena obrtnog momenta u širokom opsegu. Oni se široko koriste za električnu vuču (tramvaji, podzemne željeznice, trolejbuse, električne lokomotive i lokomotive na pruzi), kao i za dizalice i transportne instalacije.
Ruin ^ sha Fig. 10-12. Šeme za regulisanje kratkoročnih
Imajte na umu da kada je brzina rotacije povećana, serijski motor za uzbunu ne ide u generatorski mod. Na sl. 10-11, to se ogleda u činjenici da je karakteristika n - f(/) ne preseca osi ordinata. Fizički to objašnjava činjenica da se prilikom prelaska na generatorski režim, za određeni pravac rotacije i određeni polaritet napona, pravac struje treba promeniti u suprotnom pravcu, a pravac e. itd. E aa polaritet polova mora ostati nepromenjen, ali se drugi ne mogu menjati kada se promjena struje u lijevanju uzbude. Zbog toga, da bi se serijski motor za uzbunu prenio u generatorski mod, neophodno je zameniti krajeve polja namotaja.
Kontrola brzine slabljenje polja. Uredbathenkroz slabljenje polja proizvedeno je ili skenjanjem navijanja uzbude sa određenim otporom ^ mv (slike 10-12, a),ili smanjenjem broja okreta rana u navijanju uzbude. U drugom slučaju, potrebno je obezbediti odgovarajuće zaključke iz navođenja uzbuđenja.
S obzirom na to da je otpornost navijanja ekscitacije 7? i pad napona preko njega su mali, onda bi gw-c trebao biti i mali. Gubici

u otporu R m B su takođe mali, a ukupan gubitak uzbuđenja za skenjivanje čak i smanjuje. Kao rezultat toga, efikasnost motora ostaje visoka, a takav metod kontrole se široko koristi u praksi.
Kada je namotavanje ekscitacije šanirano, struja ekscitacije od vrednosti / se smanjuje
i brzinu nshodno tome povećava se. Izrazi za brzinu i mehaničke karakteristike će se dobiti ako
u jednakosti (10-19) ~ i (10-20) zamenjujemo k &na k k 0 B, gde

je koeficijent slabljenja ekscitacije. Kada kontrolišete brzinu promjenom broja obrtaja polja navijanja
Ryas. 40-13. Mehaničke karakteristike »serijskog motora uzbude sa različitim metodama kontrole brzine
Na sl. Prikaz 10-13 (krivine I, 2, 3) karakteristika n = f (M)za ovaj slučaj p &< гулирования скорости при нескольких значениях & ов (значению k 0 = 1 odgovara prirodnoj karakteristici I, kp r,= * = 0,6 - krivulja 2 i k0 .. n = 0,3 - krivulja 5). Karakteristike d £ dzr u relativnim jedinicama i odgovaraju slučaju kada kf»Const i R a x=0,1.
Kontrola brzine pomeranjem sidra. Kada se armatura prebaci (slike 10-12, b), struja i struja pobuđivanja se povećavaju, a "brzina se smanjuje. Od padanja R ^ fmajo, stoga mogu prihvatiti - R B«0, onda otpor R ^ a whish * iskrennalazi se pod punim napetostima mreže, dolina koja je vodeća je značajna, gubici u njemu će biti veliki, a gubici će se znatno smanjiti.
Štaviše, pomeranje sidra je efikasno samo kada magnetni krug nije zasićen. S tim u vezi, retko se koristi ranžiranje sidra u praksi.
Na sl. 10-13 kriva 4 n = f (M)at

Fig. 10-14. Paralelno i sekvencijalno prebacivanje serija motora za uzbunu radi promene brzine rotacije
Kontrola brzine tako što se priključi otpor u krug armature
(Slika 10-12, c).Ova metoda vam omogućava da se prilagodite nu odnosu na nominalnu vrednost. Pošto se istovremeno efikasnost u ovom slučaju značajno smanjuje, takav način kontrole utvrdjuje ograničenu odgovornost.
Izrazi za brzinu i mehaničke karakteristike u ovom slučaju se dobijaju ako smo u (10-20) i (10-21) zamijenili R ana Ra+ Rpa-Karakteristike n = f (M)za ovaj način kontrole brzine R P a *= 0.5 je prikazano na Sl. 10-13 u obliku krive 5.
Regulacija brzine promenom napona.Na ovaj način je moguće regulisati nniz od nominalne vrijednosti, dok održavanje visokih k. n. d. Način predmet regulacije je naširoko koristi u transportnim sistemima, gdje se svaki most instaliran poseban motor i kontrola obavlja prebacivanje motora u paralelnom vezu na serijski mreže (Sl. 10-14) . Na sl. 10-13 kriva 6 je karakteristična n= / (M)za ovaj slučaj sa U = 0,5 U n.
§ 10-6. Motori mešovite eksitacije
Kada se navijanje serije uzbude motora sa mešovitim ekscitacijom uključi u suprotnom pravcu, fluks Φ in će se smanjivati sa povećanim opterećenjem. Kao rezultat toga, karakteristike n ~ f (I)i n= / (M)će imati karakter krive 3 na sl. 10-6. Pošto je rad u ovom slučaju obično nestabilan, motori sa kontra-prekidanjem sekvencijalnog navijanja uzbude ne primenjuju se.
Uz uzastopno uključivanje sekvencijalnog navijanja uzbude, fluks Fb se povećava sa povećanim opterećenjem. Dakle, ovakav mešoviti motor za uzbunu ima mekšu mehaničku karakteristiku u poređenju sa saparalelni motor
uzbuđenje, ali strožije poređenje samotor sekvencijalnog uzimanja (slika 10-15). U zavisnosti od svrhe motora, procenat sekvencijalnog namotaja u stvaranju kompletne n. sa. Uzbuđenje može varirati u širokim granicama.
okretaja motora rotacije mješovitog uzbude se obično pod kontrolom na isti način kao u šant motora, iako je u principu moguće koristiti metode koje se koriste u seriji uzbude motora.
{!LANG-d3bf487f711be01d83ea82782337164a!}
{!LANG-df89fdb7b9c74d14f9d25d4e5a9c04b5!}
{!LANG-1ecb8735856880b789eb0e8949b2a572!}
{!LANG-adce4c4d633da410dd9a9187ea28237a!} {!LANG-2daf15c21ecce0f45a8b93a42807cecd!}{!LANG-0935c18f639452d0a41121336dd60eda!}
{!LANG-15f48f4bde9d81cad894c03f466a774f!}{!LANG-834b46d1849b5cd36bbddd3b1eb3a146!} (1), {!LANG-6fa49574b786257c3affa23edeb8062c!} (3)

{!LANG-4241d61ba5ee1a6b20ab67c90d76fcf5!}
{!LANG-e6f8d57b649e6e55cc36a888f8dbd125!}
{!LANG-45c1f5182e706e739dae2a9b9defd715!} {!LANG-c448ebd8ddef14820eef632ffe833f3c!}at n= 1500 {!LANG-699eedd079d966f6901bea385d7e8c2b!}{!LANG-9322cd851448b7799bead8cd83857ddf!} {!LANG-e7329f819db01e5b0e8aad7393d3a599!}{!LANG-4e941298db16da9f4030b00ced982f8a!}
|
{!LANG-e27775acc12d9de9f6b46e538b95cc19!} |
|||||||||||
|
{!LANG-8f731247bc61fa8a9882c2ddedadfa02!} |
{!LANG-f2dc0c561db2f656faa838862261e747!}
{!LANG-72269e72fba73c0e80acb910d4101868!} {!LANG-0848facf028ba9af4a75aa96666ff4fb!}{!LANG-d31f3ff0e8618418197bfbc09826f31b!} {!LANG-528448bc1119983adf7234438d22c401!}{!LANG-346533cc14033105df19717e5f2c380a!} u{!LANG-fda955e6b24077014f03949370115d8b!} c).{!LANG-612cf7dced69edcd6a0f33ccb2ab5b15!} u{!LANG-8222eb8bcb8b841bfb06e93d32552ac1!} u{!LANG-02029b98bfd626e2948f39f4451e1b59!} {!LANG-c7c0adfa23c095406b73e64cf4b8be7e!}{!LANG-d452dd43aace1ba13214a925df6d8aa1!} {!LANG-47a881f3bdc245a3861f82b9659cc1a1!}{!LANG-af20ffe34c750e3aed5fb9795c1668e1!} {!LANG-f80cb51e2c77eabede81962d7b36e66c!}{!LANG-73d0e898747f644860a4df30fe8c0c77!}
{!LANG-41891901d956cfcbc65d3dd1d5b4a8f5!}
{!LANG-d5a5917a166084e25653754fd3d488f5!}
{!LANG-2f1bdc5419b5832891fd592968b0dcb6!}{!LANG-4d08d542dad9e21910ca6e048cefe4e7!} {!LANG-0aef8a1ea1ed375efee4564c01ae999d!}
|
{!LANG-8ddc90b38622ac740342bc6ee0993636!} |
{!LANG-aa2bd6cf07eb6bb389ef072e2b093521!} {!LANG-1edc564c752c483b6b6333a224194280!} |
{!LANG-915c4df5760e2d5ac9ad9121ab363f9e!} |
{!LANG-a60bbb96ed7e396605cd84158d7e1572!} {!LANG-e1e18cecab683607bb36bd0492525c9e!} |
||||
{!LANG-b3d3d8190c9cb405125566745103dc75!} {!LANG-87753fb3f16ae7bbfef9a10ec9725f46!}{!LANG-53eb4ee6f929399970702eaa70b93ddb!} {!LANG-14100990f193574722b9d9f80203c446!}{!LANG-1ae882503bce65adeb4ea9c4d865f29e!} {!LANG-699eedd079d966f6901bea385d7e8c2b!}{!LANG-c6cd21500b380f0bfd2b5f63618aabdb!} {!LANG-3f4fe977ba26f2dfc4956ac1b55062be!}{!LANG-754663ff66caecb8026b1b1a36ad331b!} {!LANG-d60c0ec70e0e659b7a682dff8c53a90e!}{!LANG-8bbf0d6b594c47880feb7dfb268d6a6f!} {!LANG-8c5306f7187e22867cb6bfefaf6bcf8a!}{!LANG-86730a9110214cc72ce609866a66df32!}
{!LANG-6df2985c3db97793a996f3c7bfe425b5!} {!LANG-e6e747ebb6e278e7d1845f92d60beae1!}= 1450 rpm{!LANG-b7d0b9ff7e05e89e06e5a76a0ce59fb5!} {!LANG-c4b88d964fc6c7796207d06779a17f5f!}
{!LANG-f245a1b7601d6d76761d7bd6a9d461ea!} {!LANG-699eedd079d966f6901bea385d7e8c2b!}{!LANG-aa8a384dc7882bba770ebc6149a4b135!} {!LANG-699eedd079d966f6901bea385d7e8c2b!}
{!LANG-7593d3c5a60e3dec3ceaa2490c56784c!}
{!LANG-e8cc80d3f0962ae6cedbc785874d3ecb!} in,{!LANG-7e315e32e96856580d39a36b8ec384e9!} {!LANG-c448ebd8ddef14820eef632ffe833f3c!}at {!LANG-ea7ed98a874f6aefb1cd042fc9d30aca!}= 300 rpm{!LANG-11ebd54b855c1e677891e595e7dec1dd!} {!LANG-d7f51e3ba262d3e65f03f8aea865e092!}{!LANG-13694e744ecac12b51e6930c194d24d2!} {!LANG-21b38a78767c0569ca265952f5cebc9f!}{!LANG-101958035d1f39ce4116331e17369688!}
{!LANG-e17e53864ac6faed433f5dda5589f24b!}
{!LANG-68fbd541650f6d0674014177d8726c61!} u{!LANG-2adbd4fe60784a1533a68e11cabfe72e!}
{!LANG-e8169d79444397a5379bd63c10f5c604!}
{!LANG-c51422713bd63f62f8dd7cbe80b11ccd!}
{!LANG-c3bf9e808248f9f1fcda2f1c8337fe34!}