Antipyretika für Kinder werden von einem Kinderarzt verschrieben. Aber es gibt Situationen der Notfallversorgung für Fieber, wenn das Kind die Medizin sofort geben muss. Dann übernehmen die Eltern Verantwortung und wenden Antipyretika an. Was darf man Kindern geben? Wie können Sie die Temperatur bei älteren Kindern senken? Welche Medikamente sind am sichersten?
Bei der Auslegung des elektrischen Antriebs muss der Motor so gewählt werden, dass seine mechanischen Eigenschaften den mechanischen Eigenschaften des Produktionsmechanismus entsprechen. Die mechanischen Eigenschaften geben die Wechselbeziehung von Variablen in stationären Regimen an.
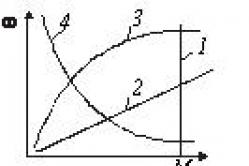
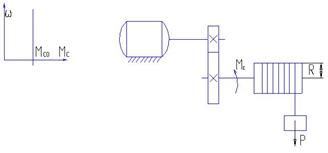
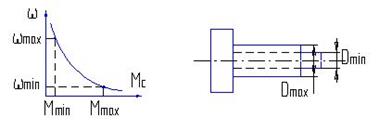
Mechanische Eigenschaft des Mechanismus genannt die Beziehung zwischen der Winkelgeschwindigkeit und dem Widerstandsmoment des Mechanismus, reduziert auf die Motorwelle) ω = f (Mc).
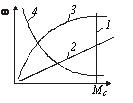
Abb. 1. Mechanische Eigenschaften von Mechanismen
Unter der Vielfalt sind mehrere charakteristische Arten von mechanischen Eigenschaften der Mechanismen:
1. Charakteristik mit dem Widerstandsmoment, unabhängig von der Geschwindigkeit (gerade Linie 1 in Abbildung 1). Die drehzahlunabhängige mechanische Kennlinie wird grafisch durch eine zur Rotationsachse parallele Gerade, in diesem Fall vertikal, dargestellt. Solche Merkmale sind beispielsweise Hubkräne, Winden, Kolbenpumpen mit konstanter Förderhöhe usw.
2. Charakteristik mit dem Widerstandsmoment linear abhängig von der Geschwindigkeit (Gerade 2 in Abbildung 1). Diese Abhängigkeit ist beispielsweise dem Antrieb eines Gleichstromgenerators mit unabhängiger Erregung eigen, der mit einer konstanten Last arbeitet.
3. Charakteristik mit einem nichtlinearen Anstieg des Moments (Kurve 3 in Abb. Typische Beispiele sind die Eigenschaften von Ventilatoren, Kreiselpumpen, Propellern. Für diese Mechanismen hängt das Moment Mc vom Quadrat der Winkelgeschwindigkeit abω
. Dieser sogenannte. parabolische (Lüfter) mechanische Eigenschaft.
4. Charakteristik mit einem nichtlinear abnehmenden Widerstandsmoment (Kurve 4 in Abbildung 1). Hier ist das Widerstandsmoment umgekehrt proportional zur Rotationsgeschwindigkeit. Die Leistung bleibt dabei über den gesamten Betriebsdrehzahlbereich des Mechanismus konstant. Zum Beispiel ändert sich bei den Mechanismen der Hauptbewegung einiger spanender Maschinen (Drehen, Fräsen, Bohren) das Moment Mc umgekehrt zu & ohgr ;, und die durch den Mechanismus verbrauchte Energie bleibt konstant.
Mechanische Eigenschaft des Elektromotors Es fordert seine Winkelgeschwindigkeitsabhängigkeit des Drehmoments ω d = f (M) .Hier sollte verstanden werden, dass das Drehmoment M der Motorwelle unabhängig von der Drehrichtung ist positiv - Antriebsmoment. Zur gleichen Zeit hat der Moment des Widerstands Mc ein negatives Vorzeichen.
Als Beispiele in Abb. 2 zeigt die mechanischen Eigenschaften: 1 - Synchronmotor; 2 - unabhängiger Gleichstrommotor; 3 - der Gleichstrommotor der Serienerregung.
![]()
Abb. 2. Mechanische Eigenschaften von Elektromotoren
Um die Eigenschaften der mechanischen Eigenschaften des elektrischen Antriebs zu bewerten, wird das Konzept der Steifigkeit der Charakteristik verwendet. Die Steifigkeit der mechanischen Eigenschaft wird durch Ausdruck bestimmt
β = dM / dω
wo d M - Ändern Sie das Motordrehmoment; d ω d ist die entsprechende Änderung der Winkelgeschwindigkeit.
Bei linearen Kennlinien bleibt der Wert von β konstant, bei nichtlinearen ist er vom Betriebspunkt abhängig.
Mit diesem Konzept werden die in Abb. 2, kann qualitativ wie folgt bewertet werden: 1 - absolut starr (β = ∞); 2 - steif; 3 - weich.
Absolut starre Eigenschaft - Die Motordrehzahl bleibt unverändert, wenn die Motorlast von Null bis zum Nennwert variiert. Synchronmotoren haben diese Eigenschaft.
Starre Eigenschaft - Die Drehzahl ändert sich geringfügig, wenn sich die Last von Null auf Nominal ändert. Diese Kennlinie hat einen Gleichstrommotor mit paralleler Erregung sowie einen Induktionsmotor im Bereich des linearen Teils der Kennlinie.
Weiche Eigenschaft - Die Motordrehzahl variiert erheblich bei relativ kleinen Laständerungen. Eine solche Charakteristik besitzt ein Gleichstrommotor mit Serien-, gemischter oder paralleler Erregung, jedoch mit einem zusätzlichen Widerstand im Ankerkreis und auch asynchron mit dem Widerstand im Läuferkreis.
Für die meisten Produktionsmechanismen werden Asynchronmotoren mit Kurzschlussläufer verwendet, die eine starre mechanische Eigenschaft haben.
Alle mechanischen Eigenschaften von Elektromotoren sind in natürliche und künstliche unterteilt.
Natürliche mechanische Eigenschaft bezieht sich auf die Betriebsbedingungen des Motors mit Nennwerten der Parameter.
Zum Beispiel kann für einen Motor mit paralleler Erregung eine natürliche Charakteristik für den Fall konstruiert werden, dass die Spannung an dem Anker und der Erregerstrom nominale Werte haben, und es gibt keinen zusätzlichen Widerstand in dem Ankerkreis.
Die natürliche Charakteristik eines Asynchronmotors entspricht der Nennspannung und der Nennfrequenz des dem Stator des Motors zugeführten Wechselstroms unter der Bedingung, dass im Rotorkreis kein zusätzlicher Widerstand vorhanden ist.
So kann für jede Maschine eine natürliche Eigenschaft nur eine, und künstliche - eine unbegrenzte Anzahl gebaut werden. Zum Beispiel hat jeder neue Widerstandswert des Gleichstrommotorankers oder in der Rotorkette eines Asynchronmotors seine eigene mechanische Charakteristik.
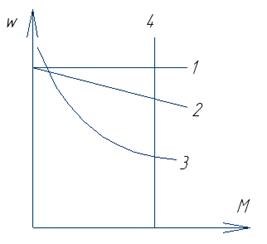
Die statische mechanische Eigenschaft des Motors genannt die Abhängigkeit der Geschwindigkeit vom Drehmoment des Motors. w = | (M). Fast alle Motoren haben die Eigenschaft, dass ihre Drehzahl eine abnehmende Funktion des Motordrehmoments ist. Dies gilt für alle in der Industrie üblichen elektrischen Motoren, also für Gleichstrommotoren mit unabhängiger, sequentieller und gemischter Erregung sowie für asynchrone bürstenlose und Kollektor-Wechselstrommotoren. Der Grad der Geschwindigkeitsänderung bei der Variation des Drehmoments für verschiedene Motoren ist jedoch unterschiedlich und wird durch die sogenannte steifigkeit ihre mechanischen Eigenschaften.
Steifigkeit der mechanischen Eigenschaft des Antriebs- ist das Verhältnis der Zunahme des von der Elektromotorvorrichtung erzeugten Drehmoments mit einer Geschwindigkeitsänderung zu der entsprechenden Differenz der Winkelgeschwindigkeiten des elektrischen Antriebs:
![]()
Typischerweise weisen die mechanischen Eigenschaften der Motoren in Arbeitsbereichen eine negative Steifigkeit von β auf<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Die Steifigkeit der mechanischen Eigenschaft im geometrischen Sinn ist die Steigung der mechanischen Eigenschaft des Motors.
Wenn Sie die Merkmale 1 und 2 vergleichen, ist das Merkmal 1 weicher, weil seine Neigung ist geringer
D 1\u003e D 2 2 b 1\u003e b 2, seit und.
Die mechanischen Eigenschaften von Elektromotoren können in vier Hauptkategorien unterteilt werden:
1. Absolut steife mechanische Eigenschaft (β = ∞) ist die Charakteristik, bei der die Geschwindigkeit mit der Änderung des Moments unverändert bleibt. Synchronmotoren haben diese Eigenschaft (Gerade 1 in Abb. 1).
2. Starre mechanische Eigenschaft Dies ist eine Eigenschaft, bei der die Drehzahl mit der Änderung des Drehmoments zwar abnimmt, jedoch in geringem Maße. Eine starre mechanische Eigenschaft besitzen Gleichstrommotoren mit unabhängiger Erregung sowie Asynchronmotoren innerhalb des Arbeitsteils der mechanischen Kennlinie (Kurve 2 in Fig. 1).
Bei einem Induktionsmotor ist die Steifigkeit an verschiedenen Stellen der mechanischen Charakteristik unterschiedlich. Zwischen den maximalen (kritischen) Werten der Momente in den Motoren Mk, q und den Modi des Generators Mk, r weist die Charakteristik des Induktionsmotors eine relativ hohe Steifigkeit auf.
 3. Weiche mechanische Eigenschaft ist eine Eigenschaft, bei der sich die Geschwindigkeit mit der Änderung des Moments signifikant ändert. Solche Eigenschaften besitzen Gleichstrommotoren mit Serienerregung, insbesondere im Bereich kleiner Momente (Kurve 3 in Fig. 2). Bei diesen Motoren bleibt die Steifigkeit nicht für alle charakteristischen Punkte konstant.
3. Weiche mechanische Eigenschaft ist eine Eigenschaft, bei der sich die Geschwindigkeit mit der Änderung des Moments signifikant ändert. Solche Eigenschaften besitzen Gleichstrommotoren mit Serienerregung, insbesondere im Bereich kleiner Momente (Kurve 3 in Fig. 2). Bei diesen Motoren bleibt die Steifigkeit nicht für alle charakteristischen Punkte konstant.
Gleichstrommotoren mit gemischter Erregung können der zweiten oder dritten Gruppe zugeordnet werden, abhängig von dem Wert der Steifigkeit der mechanischen Charakteristik.
4. Absolut weiche mechanische Eigenschaft (β = 0) ist eine Charakteristik, bei der die Winkelgeschwindigkeit des Motors unverändert bleibt. Solche Eigenschaften sind beispielsweise Gleichstrommotoren mit unabhängiger Erregungsleistung ihrer Stromquelle, oder wenn in beengten Antriebssystemen im Ankerstromstabilisierungsmodus (Linie 4 in Fig. 2) arbeiten.
Mechanische Eigenschaften der Arbeitsmaschine Ist die Abhängigkeit der Geschwindigkeit der Arbeitsmaschine von dem Moment des Widerstands, das sie erzeugt, w = | (M c).
Die mechanischen Eigenschaften beschreiben die Belastung des elektrischen Antriebs.
Klassifizierung typischer Lasten:
1. Das aktive Moment des Widerstands M c = const
Beispiel: Hubwindenantrieb.
Die Ladung kann den Mechanismus selbst aktivieren, daher wird sie als aktiv bezeichnet. Die Parkbremse muss für die Konstruktion vorgesehen sein.
2. reaktives Widerstandsmoment M c = const (Belastung der Art der Momentkonstanz)
Typisch für Mechanismen wie "trockene Reibung".
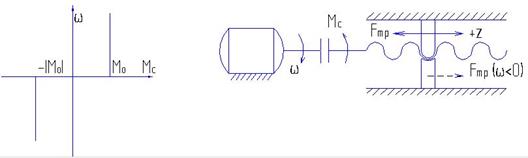
Mc = M 0 Zeichen (w).
w\u003e 0 Þ Mc\u003e 0; w<0 Þ М с <0.
Das reaktive Moment ist eine Reaktion auf die Geschwindigkeit w.
3. Viskose Reibung
Mc = α BTω
Der Widerstandsmoment ist proportional zur Geschwindigkeit.
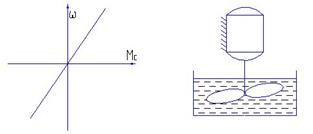
bw ist der Koeffizient der viskosen Reibung.
4. Das Ventilationsmoment
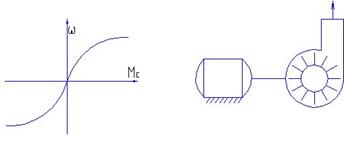
Mc = kw 2 Zeichen (w).
Typisch für Radialventilatoren und Pumpen.
Wenn der Einlass geschlossen ist, sinkt das Lastmoment.
P = M c w ist die Leistung.
5. Konstante Leistung P = const
Wo P c = const.
Es wird oft für die Hauptantriebe von Werkzeugmaschinen verwendet (Drehen, Fräsen, Bohren, Schleifen und andere Maschinen).
w max ∙ M min = w min ∙ M max = const.
Überlegen wir uns umzudrehen:
w = const, F p = const.

Für Planer:
P 1 = v min ∙ F max - Arbeitshub, P 1 = v max ∙ F min - Leerlauf.
P 1 »P 2 = const.
Merkmale der Motorauswahl:
Bei P 1 = 5 kW ergibt sich P dv = 5 ∙ 100 = 500 kW.
Die direkte Auswahl des Motors aus den Grenzwerten führt zu einer Überschätzung der installierten Motorleistung in Dw-Zeiten, wobei D w der Geschwindigkeitsregelbereich ist. Tatsächlich kann die Motorleistung durch Auswählen des Drehzahlsteuerbereichs spezifisch verringert werden.
Bei der DFT ist HB die Drehzahlregelung für Erregerströme.
Mechanische Eigenschaft des Motors genannt die Abhängigkeit der Drehzahl rotor ab dem Moment auf der Welle n = f (M2). Da das Leerlaufmoment unter Last klein ist, ist M2 ∈ M und die mechanische Kennlinie wird durch die Abhängigkeit n = f (M) dargestellt. Wenn wir die Beziehung s = (n1 - n) / n1 berücksichtigen, dann kann die mechanische Charakteristik durch Darstellung der graphischen Abhängigkeit in den Koordinaten n und M erhalten werden (Abb.
Abb. 1. Mechanische Eigenschaft eines Asynchronmotors
Die natürliche mechanische Eigenschaft eines Induktionsmotors entspricht dem Haupt- (Pass) Schema seiner Aufnahme und den nominalen Parametern der Versorgungsspannung. Künstliche Eigenschaftenwerden erhalten, wenn zusätzliche Elemente enthalten sind: widerstände , reaktoren , kondensatoren . Wenn der Motor mit einer Nennspannung betrieben wird, unterscheiden sich die Eigenschaften auch von den natürlichen mechanischen Eigenschaften.
Mechanische Eigenschaften sind ein sehr praktisches und nützliches Werkzeug für die Analyse von statischen und dynamischen Modi des elektrischen Antriebs.
Die wichtigsten Punkte der mechanischen Eigenschaften: kritische Schlupf und Frequenz, maximales Drehmoment, Anlaufmoment, Nennmoment.
Die mechanische Eigenschaft ist die Abhängigkeit des Drehmoments vom Gleiten, oder anders gesagt von der Anzahl der Umdrehungen:
![]()
Vom Ausdruck  es ist ersichtlich, dass diese Abhängigkeit sehr kompliziert ist, da, wie Formeln zeigen)
es ist ersichtlich, dass diese Abhängigkeit sehr kompliziert ist, da, wie Formeln zeigen)  und
und  Schlupf tritt auch in die Ausdrücke für ein Ich 2
und cos? 2. Die mechanische Charakteristik eines Asynchronmotors wird üblicherweise grafisch dargestellt
Schlupf tritt auch in die Ausdrücke für ein Ich 2
und cos? 2. Die mechanische Charakteristik eines Asynchronmotors wird üblicherweise grafisch dargestellt
Der Startpunkt des Merkmals entspricht n = 0 und s = 1: Dies ist der erste Moment des Startens des Motors. Startdrehmoment M n - Ein sehr wichtiges Merkmal der Betriebseigenschaften des Motors. Wenn die M n Klein, kleiner als das Nennbetriebsdrehmoment, kann der Motor nur im Leerlauf oder mit einer entsprechend reduzierten mechanischen Belastung gestartet werden.
Bezeichne durch M np Das entgegenwirkende (Brems-) Drehmoment, das durch die mechanische Belastung der Welle erzeugt wird, bei der der Motor startet. Eine offensichtliche Bedingung für die Möglichkeit, den Motor zu starten, ist: M n > M np . Wenn diese Bedingung erfüllt ist, wird sich der Rotor des Motors bewegen, die Anzahl der Umdrehungen davon n wird zunehmen und gleiten s abnehmen. Wie aus dem obigen Bild ersichtlich ist, steigt das Drehmoment des Motors von ab M n bis zum Maximum M m , entsprechend kritischem Schlupf s kpdaher die überschüssige verfügbare Motorleistung, bestimmt durch den Unterschied in den Momenten M und M np .
Je größer der Unterschied zwischen dem verfügbaren Motordrehmoment (möglich bei einem gegebenen Schlupf in der Betriebscharakteristik) M und entgegengesetzt M np Je einfacher der Startmodus und je schneller der Motor die konstante Drehzahl erreicht.
Wie die mechanischen Eigenschaften zeigen, wird bei einer bestimmten Anzahl von Umdrehungen (bei s = s kp) Das verfügbare Drehmoment des Motors erreicht das für den gegebenen Motor maximal mögliche (bei einer gegebenen Spannung) U ) Werte M t . Ferner erhöht der Motor weiterhin die Drehzahl, aber das verfügbare Drehmoment nimmt schnell ab. Bei einigen Werten n und s das Drehmoment des Motors wird gleich dem Gegenmoment: der Start des Motors wird beendet, seine Geschwindigkeit wird auf den Wert eingestellt, der dem Verhältnis entspricht:
![]()
Dieses Verhältnis ist für alle Lastbedingungen des Motors, dh für alle Werte, obligatorisch M np das maximal verfügbare Motordrehmoment nicht überschreiten M t . Innerhalb dieser Grenzen passt sich der Motor automatisch an alle Lastschwankungen an: Wenn er während des Motorbetriebs seine mechanische Belastung für einen Augenblick erhöht M np wird mehr sein als der Moment, der vom Motor entwickelt wird. Die Motordrehzahl beginnt zu sinken und der Moment wird zunehmen.
Die Rotationsgeschwindigkeit wird auf einem neuen Niveau entsprechend der Gleichheit festgelegt M und M np . Wenn die Last abnimmt, wird der Übergang zum neuen Lastbereich umgekehrt.
Wenn das Lastmoment M np wird überschreiten M t Der Motor stoppt sofort, da bei weiterer Verringerung der Motordrehzahl das Motordrehmoment abnimmt.
Daher das maximale Motordrehmoment M t wird auch der Umsturz oder kritischer Moment genannt.
Wenn in der Moment-Formel ![]() ersetzen:
ersetzen:
dann bekommen wir:
Nehmen wir die erste Ableitung von M indem wir es mit Null gleichsetzen, finden wir, dass der Maximalwert des Drehmoments kommt, wenn:
das heißt mit einem solchen Gleiten s = s kp , bei dem der aktive Widerstand des Rotors gleich dem induktiven Widerstand ist
![]()
Werte s kp Die Mehrzahl der Asynchronmotoren liegt im Bereich von 10 - 25%.
Wenn in der obigen Formel des Augenblicks anstelle des aktiven Widerstandes r 2 Ersetzen Sie das Induktive durch die Formel
![]()
Maximales Drehmoment asynchronmotor ist proportional zu dem Quadrat des magnetischen Flusses (und daher dem Quadrat der Spannung) und umgekehrt proportional zu der Induktivität der Streuung der Wicklung des Rotors.
Wenn die an den Motor angelegte Spannung konstant ist, ist ihr Fluss F bleibt fast unverändert.
Die Streuinduktivität der Rotorkette ist ebenfalls praktisch konstant. Wenn sich der aktive Widerstand in der Rotorschaltung ändert, ändert sich daher der Maximalwert des Drehmoments M t Es wird sich nicht ändern, sondern an verschiedenen Rutschen (mit einem Anstieg des aktiven Widerstandes des Rotors - für große Schlupfwerte) kommen.
Offensichtlich wird die maximal mögliche Belastung des Motors durch seinen Wert bestimmt M t . Der Arbeitsteil der Motorleistung liegt in einem engen Drehzahlbereich von n, das Entsprechende M t bis. Wann? n = n 1 (Endpunkt des Merkmals) M = 0, da bei synchroner Rotordrehzahl s = 0 und I 2 = 0.
Das Nennmoment, das den Wert der Nennleistung des Motors bestimmt, wird üblicherweise als 0,4-0,6 aus genommen M t . So erlauben Asynchronmotoren eine kurzzeitige Überlastung von 2 - 2,5 mal.
Der Hauptparameter, der den Betriebsmodus eines Asynchronmotors kennzeichnet, ist der Schlupf s - die relative Differenz zwischen der Rotordrehzahl des Motors n und seinem Feld no: s = (no - n) / no.
Die Fläche der mechanischen Eigenschaft, die 0 ≤ s ≤ 1 entspricht, ist der Bereich der Motorregime mit s< s кр работа двигателя устойчива, при s > s cr ist instabil. Für s< 0 и s > In 1 ist das Motordrehmoment gegen die Drehrichtung seines Rotors gerichtet (jeweils regeneratives Bremsen und Bremsen durch Gegenrichtung).
Ein stabiler Teil der mechanischen Eigenschaften des Motors wird oft beschrieben die Kloss-Formel Durch Einsetzen der Parameter des Nominalmodus kann der kritische Schlupf s Cr bestimmt werden:
 ,
,
wobei: λ = M kp / M - Überlastfähigkeit des Motors.
Mechanische Eigenschaften gemäß den Verzeichnis- oder Katalogdaten können ungefähr an vier Punkten konstruiert werden (Abbildung 7.1):
Punkt 1 - idealer Leerlauf, n = n 0 = 60 f / p, M = 0, wobei: p - Anzahl der Polpaare des Magnetfeldes des Motors;
Punkt 2 - nominal, Modus: n = n,, М = М = = 9550 P / / н, wobei P - - Motornennleistung in kW;
Punkt 3 - kritischer Modus: n = ncr, M = Mcr = λMn;
Punkt 4 - Startmodus: n = 0, M = M Start = β M N.
Bei der Analyse von Motorbetriebslastbereich zu M n und etwas stabilen Teil können die mechanischen Eigenschaften in etwa durch die Gleichung einer geraden Linie beschrieben werden n = 0 n - in M, wobei der Koeffizient „a“ durch Einsetzen in der Gleichung Parameter leicht bestimmt Nenndrehzahl n N und M n.
Statorwicklung Design. Ein- und zweilagige Schleifenwicklungen.
Je nach Auslegung der Spulen sind die Wicklungen in weiche Spinnspulen und Spulen mit starren Spulen oder Spulen unterteilt. Weiche Spulen bestehen aus einem runden isolierten Kabel. Um die gewünschte Form zu erhalten, werden sie auf den Schablonen vorgewickelt und dann in vereinzelten trapezförmigen Rillen gestapelt (siehe Abbildung 3.4, in der, gund 3.5, in der); Während des Wickelvorgangs werden Zwischenphasendämmmatten installiert. Dann werden die Spulen in den Nuten mit Hilfe von Keilen oder Abdeckungen verstärkt, geben ihnen die endgültige Form (bilden die vorderen Teile), verbinden die Wicklung und imprägnieren sie. Der gesamte Prozess zur Herstellung von V-Wicklungen kann vollständig mechanisiert werden.
Starre Spulen (Halbspulen) bestehen aus einem rechteckigen isolierten Draht. Die endgültige Form wird ihnen vor dem Verfugen gegeben; Gleichzeitig überlagern sie die Isolierung von Körper und Phase. Dann werden die Spulen in vorisolierten offenen oder halboffenen Nuten verlegt , stärken und imprägnieren.
1. Einlagige Wicklungen - am besten geeignet für mechanisierte Verlegung, da in diesem Fall die Wicklung konzentrisch sein muss und gleichzeitig in die Statornuten mit beiden Seiten der Spule passt. Ihre Verwendung führt jedoch aufgrund der beträchtlichen Länge der Frontteile zu einem erhöhten Verbrauch des Wickeldrahtes. Weiterhin ist in solchen Wicklungen ist nicht möglich, eine Verkürzung der Schritte auszuführen, was zu einer Verschlechterung führt form Magnetfeld in dem Luftspalt, zusätzliche Verluste zunehmen, Auftreten von Fehlern in der mechanischen Eigenschaften und in Rauschen zu erhöhen. Wegen ihrer Einfachheit und Billigkeit werden solche Wicklungen jedoch häufig in Asynchronmotoren mit geringer Kapazität von bis zu 10-15 kW verwendet.
2. Zweischichtig Wicklungen- ermöglichen eine Verkürzung des Wicklungsabstands auf eine beliebige Anzahl von Zahnteilungen, wodurch die Form des durch die Wicklung erzeugten Magnetfelds verbessert wird und die höheren Harmonischen in der EMK-Kurve unterdrückt werden. Außerdem wird mit doppelschichtigen Wicklungen eine einfachere Form von stirnseitigen Verbindungen erhalten, was die Herstellung von Wicklungen vereinfacht. Solche Wicklungen werden für Motoren mit einer Leistung von über 100 kW mit starren Spulen verwendet, die manuell verlegt werden.
Statorwicklungen. Ein- und zweischichtige Wellenwicklungen
In den Nuten des Statorkerns ist eine Mehrphasenwicklung angeordnet, die mit dem Wechselstromnetz verbunden ist. Mehrphasensymmetrische Wicklungen mit einer Anzahl von Phasen teinschließen tphasenwicklungen, die mit einem Stern oder Polygon verbunden sind. So zum Beispiel im Fall einer dreiphasigen Statorwicklung die Anzahl der Phasen m =3 und Wicklungen können mit einem Stern oder einem Dreieck verbunden werden. Die Wicklungen zwischen den Phasen sind um einen Winkel von 360 / t Grad; bei einer dreiphasigen Wicklung beträgt dieser Winkel 120 °.
Die Phasenwicklungen bestehen aus getrennten Spulen, die in Reihe, parallel oder seriell parallel geschaltet sind. In diesem Fall spulebedeutet mehrere in Reihe geschaltete Wicklungen der Statorwicklung, die in den gleichen Nuten angeordnet sind und eine gemeinsame Isolation in Bezug auf die Wände der Nut aufweisen. Wiederum spulezwei aktive (dh im Kern des Stators befindliche) Leiter sind in zwei Nuten unter benachbarten gegenüberliegenden Polen angeordnet und in Reihe miteinander verbunden. Leiter, die sich außerhalb des Statorkerns befinden und aktive Leiter miteinander verbinden, werden als vordere Teile der Wicklung bezeichnet. Die geradlinigen Teile der Wicklungen der Wicklungen, die in den Nuten liegen, werden die Seiten der Wicklungen oder Nuten genannt.
Die Statornuten, in denen die Wicklungen gestapelt sind, bilden die sogenannten Zähne an der Innenseite des Stators. Der Abstand zwischen den Mitten zweier benachbarter Zähne des Statorkerns, gemessen entlang seiner dem Luftspalt zugewandten Oberfläche, wird bezeichnet zahnteilungoder schlitzteilung.
Mehrschicht-Zylinderspulenwicklungen (Fig. 3) sind aus einem runden Draht gewickelt und bestehen aus mehrlagigen Scheibenspulen, die entlang der Stange angeordnet sind. Zwischen den Spulen (durch jede Spule oder durch zwei oder drei Spulen) können radiale Kanäle zur Kühlung gelassen werden. Solche Wicklungen werden auf der Hochspannungsseite verwendet, wenn S ≤ 335 kV × A, Ich ≤ 45 A und U l ≤ 35 kV.
Ein- und zweilagige zylindrische Wicklungen (Bild 4) sind aus einem oder mehreren (bis zu vier) parallelen Rechteckleitern gewickelt und werden z S ≤ 200 kV × A, Ich ≤ 800 A und U l ≤ 6 kV.
THEMA DER VORTRÄGE 10
Mechanische Eigenschaften von Elektromotoren
Vortragsplan
1. Natürlich und künstlichmechanische Eigenschaftenelektromotoren
- Härte mechanische Eigenschaften
- Die natürliche mechanische Eigenschaft eines Gleichstrommotors mit paralleler Erregung
- Natürliche mechanische Eigenschaft
- Natürlich
- Mechanische Eigenschaft eines Synchronmotors. Umfang von Synchronmotoren auf Schiffen
Die mechanische Eigenschaft des Motors ist unabhängig von der Art des Stroms die Abhängigkeit der Winkelgeschwindigkeit der Motorwelle ω (nachfolgend als der Motor bezeichnet) von dem elektromagnetischen Moment des Motors, dh der ω (ω) Abhängigkeit.
Hier sollten wir eine wichtige Beobachtung machen: gemäß der Gleichung der Momente, im stationären Zustand =, das elektromagnetische Moment des Motors ausgeglichen statisches Moment (Moment ohm Widerstand) Mechanismus. Dies bedeutet, dass die Größe des elektromagnetischen Moments des Motors hängt vollständig vom Moment des Mechanismus ab?? Je größer das Bremsmoment des Mechanismus ist, desto größer ist das Drehmoment des Motors und umgekehrt.
Also, für jeden Motor ist der Eingangswert das Moment des Mechanismus und der Ausgang?? seine Geschwindigkeit.
Die Drehzahl fast aller Elektromotoren ist eine abnehmende Funktion des Motormoments, dh mit steigendem Drehmoment verringert sich die Drehzahl [Chill 33]. Aber die Rate der Änderung der Geschwindigkeit für verschiedene Elektromotoren ist anders und ist durch einen Parameter gekennzeichnet Steifigkeit der mechanischen Eigenschaften.
Steifheit mechanische Eigenschaften des elektrischen Antriebs β dieses Verhältnis der Differenz der elektromagnetischen Momente des Motors bei verschiedenen Geschwindigkeiten zu der entsprechenden Differenz der Winkelgeschwindigkeiten des elektrischen Antriebs.
β = (¼ 2 ¼ ¼ 1) / (ω2 ω1) = Δ / Δω
Üblicherweise haben die mechanischen Eigenschaften von Elektromotoren in Arbeitsbereichen eine negative Steifigkeit β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Ausgezeichnet natürlich und künstlichmechanische Eigenschaftenund Elektromotoren.
Natürliche mechanische Eigenschaft ?? dies ist die Abhängigkeit ω (), normal genommen Motorbetriebsbedingungen, d.h. bei nominalen Parametern Versorgungsnetz und das Fehlen zusätzlicher Widerständein den Ketten der Wicklungen der Motoren.
Die Parameter der Netzversorgung sind: bei einem konstanten Strom? Spannung, mit Wechselstrom? Spannung und Frequenz des Stromes.
Merkmale unter Bedingungen, anders als normal, künstlich genannt.
Artificial Eigenschaften können durch Änderung der Motorparameter erreicht werden, beispielsweise durch einen Widerstand mit der Gleichstrommotoranker Einführen Schaltung oder in der Induktionsmotorrotor Wicklungsschaltung Wicklung oder der Netzparameter ändern, d.h. Spannung und Frequenz des Wechselstroms.
Jeder Elektromotor hat ein natürlicher und satz von künstlichen Eigenschaften. Die Anzahl der künstlichen Eigenschaften hängt von der Anzahl der Stufen des Regelelements ab, beispielsweise von der Anzahl der Stufen des Regelwiderstands in der Gleichstrommotorankerwicklung. Ist der Motor solcher Stufen? fünf, dann hat dieser Motor sechs Eigenschaften ?? fünf künstliche und eine natürliche.
Künstliche mechanische Eigenschaften werden verwendet, um solche Motorbetriebsmodi wie Geschwindigkeitssteuerung, Rückwärtsfahrt, elektrisches Bremsen usw. zu erhalten.
Betrachten Sie das Natürlicheth mechanische Eigenschaften von Motorenverschiedene Arten.
Abb. 10.1 Natürliche mechanische (a) und Winkel (b) Eigenschaften des Synchronmotors; θ Verzögerungswinkel der Rotorachse von der Achse des Magnetfelds der Statorwicklung
Die natürliche mechanische Eigenschaft eines Synchronmotors
Natürlich mechanischcharakterisierung Synchronmotor(Abbildung 10.1a)? absolut starr?? Das Merkmal, in demdie Geschwindigkeit mit der Änderung des Moments ändert sich nicht, seine Starrheit (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C tabilnost Synchronmotor Rotorwinkelgeschwindigkeit erläutert die Merkmale eines Synchronmotors θ () wie folgt (Fig. 10.1 B), wenn die mechanische Last auf den Rotor nicht angewendet wird, die Rotorachse und dem rotierenden Magnetfeld der Statorwicklungen gleich sind, d.h. θ = 0 ° (Punkt 0 in Abb. 10.1 b). Wenn das elektromagnetische Moment des Motors M = 0 ist, läuft der Motor im Leerlauf.
Wenn Sie die Motorwelle mechanisch belasten und erhöhen, wird der Rotor dem Magnetfeld der Statorwicklung um einen zunehmenden mechanischen Winkel θ nacheilen.
Je größer die mechanische Belastung der Welle ist, desto größer ist dieser Winkel und desto größer ist das rotierende elektromagnetische Moment des Motors.
Dies gleichzeitige Zunahme des Drehmoments Motor, verursacht durch eine Erhöhung des Bremsmoments des Mechanismus einfach bietet Motordrehzahlstabilität (in Abbildung 10.1 a ist der charakteristische Abschnitt von = 0 bis =).
Die Konstanz der Motordrehzahl wird jedoch beibehalten, solange der Winkel θ ≤ 90º ist. Bei θ = 90 ° entwickelt der Motor das kritische (maximale) Moment (Punkt A in Abb. 10.1 a).
Wenn die mechanische Last wieder bei θ = 90º (θ\u003e 90º) erhöht wird, wird das elektromagnetische Moment des Motors abnehmen (Segment AB der Winkelcharakteristik), d.h. Dieses Moment ist kleiner als das Bremsmoment des Mechanismus. Infolgedessen wird die Rotordrehzahl des Motors abnehmen und schließlich wird der Rotor anhalten.
Da die Geschwindigkeit des Rotors geringer ist als die Geschwindigkeit des rotierenden Magnetfelds der Statorwicklung, wird gesagt, dass der Motor aus der Synchronität geraten ist.
Wie aus der Winkelcharakteristik des Motors folgt, ist die Bedingung für den Synchronmotorverlust des Motors: θ ≤ 90º.
In der Praxis beträgt der Nennwinkel θ = 20 ... 40 °.
Umfang der Synchronmotoren: auf Schiffen ?? als Ruderelektromotoren, rotierende Schrauben; am Ufer ?? zum Antrieb leistungsfähiger Mechanismen, beispielsweise Kompressoren an Gaspumpstationen.
Die natürliche mechanische Eigenschaft eines Gleichstrommotors
Natürlich mechanische Eigenschaft eines Gleichstrommotorsparallele Anregung (Abbildung 8.5) ??nun, weil es steif ist
β = Δ / Δω ≤ 10%.
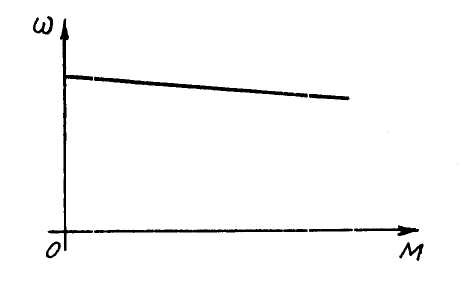
Abb. 10.2 Natürlich mechanische Eigenschaft des Parallel-Gleichstrommotors
Dies bedeutet, dass wenn das elektromagnetische Moment des Motors innerhalb eines weiten Bereichs geändert wird, seine Geschwindigkeit ziemlich stabil ist (d. H. Sich geringfügig ändert).
Solche Motoren werden verwendet, wo, wenn die Last des Mechanismus in weiten Grenzen variiert, die Geschwindigkeit des Motors sich nicht stark ändern sollte? in elektrischen Antrieben von Pumpen, Ventilatoren usw.
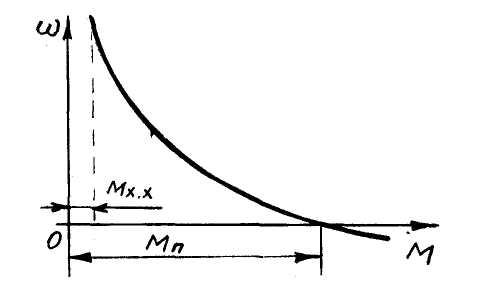
Abb. 10.3 Natürlich mechanische Eigenschaftein Gleichstrommotor
Natürlich mechanische Eigenschaft eines Gleichstrommotors der Serienerregung (Fig. 10.3) ?? weich wegen seiner Starrheit
β = Δ / Δω\u003e 10%.
Dies bedeutet, dass, wenn sich das elektromagnetische Moment des Motors ändert, selbst in einem kleinen Bereich, seine Geschwindigkeit sich signifikant ändert.
Erinnern wir uns an zwei charakteristische Merkmale dieses Motors ein Gleichstrommotor:
- Mit einer Verringerung der mechanischen Belastung der Welle oder deren Fehlen (=)
die Geschwindigkeit des Motors steigt stark an, der Motor "pendelt". Daher kann dieser Motor nicht auf der Welle unbelastet bleiben;
- Beim Start entwickelt der Motor mehr Startmomente als andere Motortypen.
Diese Motoren gelten nicht für die Gerichte, sind aber am Strand zum Beispiel verwendet, in elektrischem Transport, insbesondere in dem Wagen, in denen sie nicht ohne eine Last auf der Welle nach links, und der Notwendigkeit, hohen Startmoment (bei Wagen mit Raum ziehen).
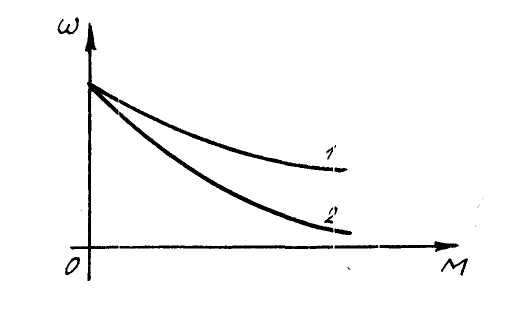
Abb. 10.4 Natürlich mechanische Eigenschaften von Gleichstrommotoren mit gemischter Erregung: 1 s parallel-sequentielle Anregung;
2-s nacheinander parallele Erregung
Natürlich die mechanische Eigenschaft des Mischanregungsgleichstrommotors liegt zwischen den Eigenschaften der Parallel- und Folgemotoren. der magnetische Erregungsfluss wird durch die gemeinsame Wirkung beider Wicklungen erzeugt ?? parallel und seriell.
Es gibt zwei Arten von gemischten Erregungsmotoren:
- mit parallel ?? sequentielle Anregung, bei der der Hauptteil des resultierenden magnetischen Flusses durch eine parallele Wicklung erzeugt wird (bis zu 70%, die restlichen 30% sequentiell);
2. mit der Reihe nach parallele Anregung, bei der der Hauptteil des resultierenden magnetischen Flusses durch eine Serienwicklung erzeugt wird (bis zu 70%, die restlichen 30%parallel.
Daher ist der Graph der mechanischen Eigenschaften des Motors des ersten Typs starrer als der des Motors des zweiten Typs.
Beide mechanischen Eigenschaften?? weich wegen ihrer Starrheit
β = Δ / Δω\u003e 10%.
Auf Schiffen werden in geregelten elektrischen Antrieben Mischanregungsmotoren eingesetzt? Winden, Wasserhähne, Ankerwinden und Turmspitzen.
Die natürliche mechanische Eigenschaft eines Induktionsmotors
Natürlich die mechanische Eigenschaft eines Induktionsmotors hat zwei Abschnitte ?? nicht funktionierende (Booster) AB und ArbeitsflugzeugD (Abbildung 8.8).
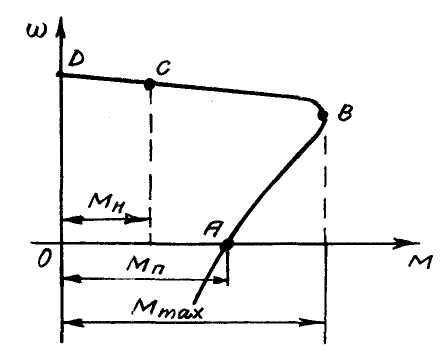
Abb. 10.5 Natürlich mechanische Eigenschaft eines Induktionsmotors
Beim Start entwickelt der Motor das Startmoment(Segment OA), wonach es entlang des Weges ABC zum Punkt C beschleunigt wird. Zur gleichen Zeit im Abschnitt AB sowohl die Geschwindigkeit als auch das Moment erhöhen, am Punkt B entwickelt der Motor das maximale Moment. Auf dem Flugzeugteil nimmt die Geschwindigkeit weiter zu, und der Moment sinkt auf das Nominale (Punkt C). Auf der WebsiteBC der Motor ist überlastet, t. überall in diesem Abschnitt das elektromagnetische Drehmoment des Motors ist größer als das Nenndrehmoment (> >).
Unter normalen Bedingungen läuft der Motor in Abschnitt CD die Starrheit davon
β = Δ / Δω < 10%.
Dies bedeutet, dass sich die Motordrehzahl unwesentlich ändert, wenn sich das Drehmoment über einen großen Bereich ändert.
Asynchronmotoren haben die breiteste Anwendung auf Schiffen mit einem Wechselstromkraftwerk gefunden.
Die Industrie produziert speziell für Schiffe Asynchronmotoren verschiedener Serien, zum Beispiel, 4A ... OM2 (vierte Reihe Asynchronmotoren), MAP (Marine-Asynchron polyusopereklyuchaemy), MTF (c gewickelten Rotor) und andere.
So Motoren einer Serie 4А ?? Single-Speed, MAP-Serie? 2- und 3-fach, MTF-Serie? Die Anzahl der Geschwindigkeiten wird vom Regelkreis bestimmt (bis zu 5 Geschwindigkeiten).
Vorlesung 7.
2.5. Mechanische Eigenschaften eines Gleichstrommotors mit Serienerregung. Motormodus
Das Schema zum Einschalten des Motors ist in Abb. 2.8. Der Motoranker M und die LM-Erregerwicklung sind in Reihe geschaltet und werden von einer einzigen U-Quelle gespeist Ich ich ist auch der Erregerstrom Ich in der . Dieser Umstand bestimmt den einzigen Unterschied in der Konstruktion eines Motors mit sukzessiver Anregung von einem Motor mit unabhängiger Erregung: Die LM-Erregerspule des DCT mit sukzessiver Erregung wird mit einem Leiter des gleichen Querschnitts wie die Ankerwicklung hergestellt.
Abb. 2.8. Diagramm der Aufnahme von DCT mit konsekutiver Anregung.
Mit einem rotierenden Anker in seiner Wicklung wird eine EMK induziert. Rotation ^ E. Auf dem Schema des Einschaltens der Motorrichtung E entgegen der Richtung U, die dem Motorbetriebsmodus entspricht. Wert E ist gleich:
Wo? ?
- Winkelgeschwindigkeit des Motors; F - Motorfluss;  - Konstruktiver Koeffizient der Motordaten für die Berechnung, die in den Fachbüchern angegeben sind. Hier p - Anzahl der Motorstangenpaare; N - Anzahl der aktiven Ankerwicklungsleiter; a - die Anzahl der Paare paralleler Zweige der Ankerwicklung.
- Konstruktiver Koeffizient der Motordaten für die Berechnung, die in den Fachbüchern angegeben sind. Hier p - Anzahl der Motorstangenpaare; N - Anzahl der aktiven Ankerwicklungsleiter; a - die Anzahl der Paare paralleler Zweige der Ankerwicklung.
Richtung des Ankerstroms Ich Ich wie die Richtung E auf dem Anschlussplan wird für die Motorbetriebsart gezeigt.
Zulässiger Wert des Motorankerstroms Ich ich füge hinzu ist durch die Schaltbedingungen und die mechanische Festigkeit des Ankers begrenzt und darf den Nennstrom nicht überschreiten Ich yang mehr als 2,5 mal Ich ich füge hinzu ? 2.5 Ich yang .
In Übereinstimmung mit der Gleichung des Spannungsgleichgewichts im stationären Betrieb des Motors wird die Spannung U, die an die Ankerschaltung des Motors angelegt wird, durch einen Abfall der Spannung in der Ankerkette ausgeglichen Ich ich R ei und induziert in der Ankerwicklung emf. Rotation E:
U = I Я R ЯЦ + Е
Wo? R JC = R Ich + R DP + R KO + R In der + R П - der Gesamtwiderstand der Ankerkette. Hier R Ich - Ankerwicklungswiderstand; R DP - Widerstand der Wicklung zusätzlicher Pole; R KO - Widerstand der Kompensationswicklung; R In der - Widerstand der Erregerwicklung; R П - Widerstand des Startwiderstandes.
Wert Ich Ich im stationären Zustand wird sein:
Im Startmodus ^ E = 0daher wegen des geringen Widerstandes der Wicklungen der Anlaufstrom Ich Ich bin kann den zulässigen Wert überschreiten. Um den Anlaufstrom zu begrenzen, wird ein Anlaufwiderstand verwendet, dessen Widerstand R П ist so gewählt, dass Ich Ich bin ? Ich Ich bin ein DOP
Aus der Gleichung des Spannungsgleichgewichts für die Ankerkette kann ein analytischer Ausdruck für die mechanische Eigenschaft des Motors erhalten werden.
Ersetzt es anstelle von emf. Rotation ^ E sein Wert und die Lösung der resultierenden Gleichung in Bezug auf die Geschwindigkeit, erhalten wir die Abhängigkeit der Motordrehzahl ? vom Ankerstrom Ich Ich ? = f (I Ich ) , die das elektromechanische Merkmal genannt wird:
Da die Erregerwicklung in Reihe mit dem Motoranker geschaltet ist, wird der von ihr erzeugte magnetische Fluss erzeugt ^ Φ ist eine Ankerstromfunktion Ich Ich . Abhängigkeit = F (I Ich ) wird als Magnetisierungskurve bezeichnet und hat einen nichtlinearen Charakter vom Typ "Sättigungszone". Es gibt keine genaue analytische Beschreibung dieser Kurve, daher gibt es auch keine genaue analytische Beschreibung der mechanischen Eigenschaften von DPT mit konsekutiver Anregung. Wenn wir die Sättigung des magnetischen Systems vernachlässigen, nehmen wir eine lineare Beziehung zwischen F und Ich Ich mit einem Koeffizienten der Proportionalität ?, das heißt, Ф =? Ich Ich , dann ist das Drehmoment:
M = k & PHgr; I H = k? I H 2
Daher wird der Wert des Ankerstroms sein:
In der Gleichung der elektromechanischen Eigenschaft wird der Wert für Ich ich , erhalten wir die Gleichung der mechanischen Eigenschaft:
Wo? A = U / k? B = R JC / (k?) - konstante Werte.
Eine Analyse der erhaltenen Gleichung zeigt, dass die Ordinatenachse eine Asymptote für die Kurve ist und dass sie im Bereich kleiner Werte der Momente eine große Steilheit aufweist
Wann? R П =0 und U = U herr der Motor arbeitet auf einer natürlichen Eigenschaft. Um ein natürliches Merkmal zu schaffen, werden die sogenannten universellen Eigenschaften verwendet, die in den Katalogen für jede Motorenreihe angegeben sind. Sie repräsentieren Abhängigkeiten n = f (I Ich ) und M = f (I Ich ) in relativen Einheiten. Wenn man die Nenndaten des Motors kennt, ist es möglich, seine Charakteristik in absoluten Werten zu konstruieren. Diese Eigenschaft ist in Abb. 2.9.
Abb. 2.9. Mechanische Eigenschaften des Gleichstrommotors der Serienerregung.
Ein Merkmal der Charakteristik ist eine starke Zunahme der Geschwindigkeit mit einer Abnahme des Widerstandsmoments M mit dem . Daher kann ein Gleichstrommotor mit Serienerregung nicht in den Fällen gestartet werden, in denen M mit dem herr , da die Motordrehzahl den zulässigen Wert überschreiten kann ?
zusätzlich =2,5 ?
herr . Dieses Merkmal kann erklärt werden, indem die Prozesse betrachtet werden, die im Motor mit einer Verringerung der Last auftreten. Nehmen wir an, dass der Motor an Punkt A auf der natürlichen Eigenschaft gearbeitet hat (siehe Abbildung 2.9). Im stationären Zustand mit der Geschwindigkeit ?
1
. Wenn das Moment des Widerstands vom Wert abnimmt M c1 zum Beispiel bis zu M c2 , erscheint ein positiver dynamischer Moment M D >0
und die Motordrehzahl beginnt zu steigen. Bei unabhängiger Anregung hat dies eine Erhöhung der EMK zur Folge. Rotation  und eine Abnahme des Ankerstroms
und eine Abnahme des Ankerstroms  und Drehmoment
und Drehmoment  . Das Erhöhen der Geschwindigkeit und das Verringern des Motordrehmoments wird bis zum Motordrehmoment fortgesetzt M auf wird gleich werden M c2 und M D wird Null.
. Das Erhöhen der Geschwindigkeit und das Verringern des Motordrehmoments wird bis zum Motordrehmoment fortgesetzt M auf wird gleich werden M c2 und M D wird Null.
Mit sukzessiver Erregung der EMK. Rotation E erweist sich als eine Funktion von zwei Größen - zunehmende Geschwindigkeit ? und abnehmender Fluss F. Als Ergebnis die Menge Eund daher die Quantitäten Ich Ich und M, mit einer Zunahme der Geschwindigkeit wird sich nicht wesentlich ändern, was zur Erhaltung von führt M D >0 und weitere Steigerung der Geschwindigkeit. Wenn der Widerstand des Startrheostats R П >0 , dann sinkt die statische Geschwindigkeit ?? mit dem im gleichen Moment wird der Motor mehr als auf der natürlichen Eigenschaft sein. Daher haben die Rheostateigenschaften eine große Neigung zur Abszissenachse.
Bei sukzessiver Erregung ist das Drehmoment proportional zum Quadrat des Ankerstroms  und Begrenzen des Startstroms auf den Wert Ich Ich bin ein DOP ? 2.5I YaN erlaubt uns viel mehr zu erhalten als mit einer unabhängigen Erregung M DOP = 5 M H . Gleichstrommotor-Überstromfaktor mit Serienanregung durch Drehmoment
und Begrenzen des Startstroms auf den Wert Ich Ich bin ein DOP ? 2.5I YaN erlaubt uns viel mehr zu erhalten als mit einer unabhängigen Erregung M DOP = 5 M H . Gleichstrommotor-Überstromfaktor mit Serienanregung durch Drehmoment
K П = M DOP / M H ist gleich fünf. Diese Überlastfähigkeit besitzt nicht mehr als ein Elektromotor. Dank dieser Eigenschaft werden Motoren mit sequentieller Erregung in elektrischen Transport- und Hebemechanismen verwendet.
Vorlesung 8.
^ 2.6. Mechanische Eigenschaften eines Gleichstrommotors mit Serienerregung. Art der elektrischen Bremsung.
Es gibt zwei Arten der elektrischen Bremsung: dynamisches Bremsen und Bremsen durch Gegenrichtung. Regenerative Hemmung ist nicht möglich, da die emf. Rotation Ees kann nicht mehr als eine Ankerquellenspannung sein U.
^ Dynamisches Bremsen wird auf zwei Arten realisiert: mit Selbsterregung und mit unabhängiger Anregung. Das Schema zum Einschalten des Motors und die mechanischen Eigenschaften für den ersten Fall sind in Abb. 2.10.
Abb. 2.10. a) das Schema des Einschaltens des Motors im Modus des dynamischen Bremsens mit der Selbsterregung;
B) die Eigenschaften des Motors im Modus der dynamischen Bremsung mit Selbsterregung.
Der Motor wird von der Quellenspannung getrennt und die Feldwicklung wird so geschaltet, dass die Richtung des Stromes Ich In der Es war das gleiche wie im Motormodus (siehe Abbildung 2.8). Dieses Beibehalten der Stromrichtung beseitigt die Zerstörung eines kleinen Restflusses, der mit der Magnetisierung des Stators des Motors verbunden ist. Diese Strömung ist der Grund für die Selbsterregung: In der Wicklung des Ankers, der sich unter der Wirkung von Trägheitskräften in der ersten Richtung dreht, wird eine EMK induziert. E, deren Richtung die gleiche wie im Motormodus ist. Unter der Wirkung von E Strom wird in der dynamischen Bremsschaltung, die im Strömungs F, emf führt zu einem Anstieg E und aktuell Ich Ich . Seit dem Strom Ich Ich in Bezug auf das Motorregime hat die entgegengesetzte Richtung, das Motordrehmoment wird hemmend. Der Motor von Punkt A im ersten Quadranten geht nach Punkt B oder C über die Charakteristik der dynamischen Bremsung im zweiten Quadranten. Der Prozess der Selbsterregung verläuft zunächst sehr intensiv und dies führt zu einem Bremsmomentwurf, der im mechanischen Teil des Antriebs Stöße verursachen kann. Daher wird häufiger ein dynamisches Bremsen mit unabhängiger Anregung verwendet. Das Schema zum Einschalten des Motors und die mechanischen Eigenschaften sind in Abb. 2.11.
Abb. 2.11. a) das Schema für das Einschalten des Motors in der Dynamik
Bremsen mit unabhängiger Anregung;
B) die Eigenschaften des Motors in der Dynamik
Bremsen mit unabhängiger Anregung.
Die Motorankerklemmen sind mit dem dynamischen Bremswiderstand kurzgeschlossen R DT und die Feldwicklung ist über den Widerstand mit der Spannung der Quelle verbunden R In der . Der Strom in ihm ist wie im Motormodus gerichtet und wird gleich dem Nennwert eingestellt. Die Eigenschaften sind denen der DCT mit unabhängiger Anregung ähnlich: Sie sind linear, befinden sich im zweiten Quadranten und durchlaufen den Ursprung.
^ Verzögerungsstopp Wie für DPT mit unabhängiger Anregung wird in dem Fall ausgeführt, in dem die Motorwicklungen in einer Drehrichtung enthalten sind, und die Motoranker unter dem Einfluß der Trägheitskräfte bzw. Widerstandsmoment der aktiven in der entgegengesetzten Richtung gedreht wird - die Aufnahme.
Ein reversibles Schema zum Einschalten der DCT mit sukzessiver Anregung ist in Abb. 2.12.
![]()
Abb. 2.12. Umschaltbares Schema zum Einschalten von DCT mit Serienerregung.
Der Zweck der Elemente ist der gleiche wie in der Schaltung in Fig. 2.5. Wenn der Motor von der Ankerseite umgekehrt wird, wird die Stromrichtung in der Erregerwicklung LM beibehalten. Daher sind alle Vorgänge beim Bremsen analog zu denen, die in der Schaltung in Fig. 2.5. Die Eigenschaften des Motors sind in Abb. 2.13.

Abb. 2.13.a) Eigenschaften der DCT mit aufeinanderfolgender Anregung im Verzögerungsmodus durch Antikoinzidenz.
B) ähnliche Eigenschaften mit aktivem M s.
Vorlesung 9.
^ 2.7. Mechanische Eigenschaften von Asynchronmotoren. Motormodus.
Asynchronmotoren (AD) - die häufigste Art von Motoren, weil sie sind einfacher und zuverlässiger im Betrieb, bei gleicher Leistung haben sie eine geringere Masse, Abmessungen und Kosten im Vergleich zu DPT. Schemata für die Aufnahme von Blutdruck sind in Abb. 2.14.
Bis vor kurzem wurde ein kurzgeschlossener Rotor in ungeregelten elektrischen Antrieben verwendet. Mit dem Aufkommen von Thyristor-Frequenzumrichtern (TPR) der Spannung, die die Statorwicklungen von AD versorgt, wurden Kurzschlussläufermotoren in einstellbaren elektrischen Antrieben verwendet. Gegenwärtig werden Leistungstransistoren und programmierbare Steuerungen in Frequenzumrichtern verwendet. Die Methode der Geschwindigkeitsregelung heißt Impuls und ihre Verbesserung ist die wichtigste Richtung in der Entwicklung des elektrischen Antriebs.
Abb. 2.14. a) das Schema des Einschaltens der AD mit einem Kurzschlussläufer;
B) das Schema zum Einschalten des AD mit einem Phasenrotor.
Die Gleichung für die mechanische Eigenschaft des Blutdrucks kann auf der Grundlage des Blutdruckersatzplans erhalten werden. Wenn wir den aktiven Widerstand des Stators in dieser Schaltung vernachlässigen, wird der Ausdruck für die mechanische Eigenschaft wie folgt aussehen:
 ,
,
Wo?  ;
;  .
.
Hier M zu – kritischer Moment; S zu - das entsprechende kritische Gleiten; U f - effektiver Wert der Phasenspannung des Netzwerks; ? 0 = 2? F / p - Winkelgeschwindigkeit des rotierenden Magnetfelds AD (synchrone Geschwindigkeit); f Frequenz der Versorgungsspannung; p - Anzahl der Blutdruckpole; x zu - Kurzschlussfestigkeit der induktiven Phase (bestimmt aus der Ersetzungsschaltung); S = (? 0 -?)/? 0 - Gleiten (Rotordrehzahl relativ zur Drehzahl des Drehfeldes); R 2 1 - gesamter aktiver Widerstand der Rotorphase.
Die mechanische Charakteristik eines AD mit einem Kurzschlussläufer ist in Abb. 2.15.
Abb. 2.15. Mechanische Eigenschaft eines kurzgeschlossenen Rotors.
Es gibt drei charakteristische Punkte darauf. Die Koordinaten des ersten Punktes ( S = 0; ? =? 0 ; M = 0). Er entspricht dem idealen Leerlauf, wenn die Rotordrehzahl gleich der Drehzahl des rotierenden Magnetfeldes. Die Koordinaten des zweiten Punktes ( S = S zu ; M = M zu). Der Motor arbeitet mit dem maximalen Drehmoment. Wann? M mit dem \u003e M zu der Motorrotor wird gezwungen anzuhalten, was für den Motor ein Kurzschluss ist. Daher wird das Drehmoment des Motors an diesem Punkt als kritisch bezeichnet M zu . Die Koordinaten des dritten Punktes ( S = 1; ? = 0; M = M n). An diesem Punkt läuft der Motor im Startmodus: 0 = Rotordrehzahl und der Rotor wirkt auf dem stationären Drehmoment M n . Der Abschnitt der mechanischen Eigenschaft, der zwischen dem ersten und dem zweiten charakteristischen Punkt liegt, wird als Arbeitsabschnitt bezeichnet. Auf ihm läuft der Motor im stabilen Zustand. Mit einem kurzgeschlossenen Rotor, wenn die Bedingungen U = U herr und f = f herr Eine mechanische Eigenschaft wird als natürlich bezeichnet. In diesem Fall gibt es im Arbeitsabschnitt der Kennlinie einen Punkt, der dem Nennbetriebsmodus des Motors entspricht und Koordinaten aufweist ( S herr ; ? herr ; M herr).
Elektromechanische Eigenschaften des Blutdrucks ? = f (I f ) , die in Abb.2.15 als gestrichelte Linie dargestellt ist, fällt im Gegensatz zu den elektromechanischen Eigenschaften der DCT nur in ihrem Arbeitsbereich mit der mechanischen Charakteristik zusammen. Dies liegt daran, dass während der Inbetriebnahme aufgrund der sich ändernden Frequenz der EMK. in der Rotorwicklung E 2 Sie variiert die aktuelle Frequenz und das Verhältnis von induktiven und aktiven Wicklungswiderständen am Anfang der aktuellen Frequenz und großer induktiven Reaktanz mehr aktiv beginnen; mit zunehmender Rotordrehzahl ? die Frequenz des Rotorstroms und damit der induktive Widerstand seiner Wicklung nimmt ab. Daher ist der Einschaltstrom des AD im Direktstartmodus 5-7 mal höher als der Nennwert Ich fn und das Startdrehmoment M n ist gleich dem Nominalwert M herr . Im Gegensatz zu DPT, bei dem es beim Anfahren notwendig ist, den Anlaufstrom und das Anlaufmoment zu begrenzen, muss beim Start des AD der Anlaufstrom begrenzt und das Anlaufmoment erhöht werden. Letzteres ist am wichtigsten, da die DCT mit unabhängiger Anregung ausgelöst wird, wenn M mit dem herr , DFT mit sequentieller Anregung bei M mit dem herr und Blutdruck während des Betriebes auf einer natürlichen Eigenschaft an M mit dem herr .
In AD mit einem Kurzschlussläufer, ein Anstieg M n Eine spezielle Konstruktion der Rotorwicklung ist vorgesehen. Die Nut für die Rotorwicklung ist tief und die Wicklung selbst ist in zwei Schichten angeordnet. Wenn der Motor gestartet wird, die Frequenz E 2 und die Rotorströme sind groß, was zum Auftreten der Wirkung der Stromverschiebung führt - Strom fließt nur in der oberen Schicht der Wicklung. Daher der Wicklungswiderstand und das Anlaufmoment des Motors M П . Seine Größe kann erreichen 1.5M herr .
In AD mit einem Phasenrotor, ein Anstieg M П wird durch die Änderung seiner mechanischen Eigenschaften zur Verfügung gestellt. Wenn der Widerstand R П , im aktuellen Strömungsweg des Rotors enthalten ist, ist Null - der Motor arbeitet auf eine natürliche Eigenschaft und M П = M H . Wann? R П >0 der gesamte aktive Widerstand der Rotorphase ist erhöht R 2 1 . Kritisches Gleiten S zu als R 2 1 steigt auch. Dies hat zur Folge, bei AD mit einem Phasenrotor die Einführung R П im Stromfluss führt der Läufer zu einer Verschiebung M Zu in Richtung großer Rutschen. Wann? S Zu = 1 M П = M Zu . Mechanische Eigenschaften von AD mit einem Phasenrotor bei R П >0 werden künstlich oder rheostatisch genannt. Sie sind in Abb. 2.16.
Abb. 2.16. Mechanische Eigenschaften von AD mit einem Phasenrotor.
Ein Induktionsmotor mit einem Kurzschlussläufer beginnt bei M n \u003e M mit dem und wird an Punkt A arbeiten (siehe Abbildung 2.15). Danach der Moment des Widerstands M mit dem kann auf erhöht werden M Zu . AD, sowie Gleichstrommotoren, mit steigender M mit dem wird automatisch, ohne äußere Einmischung, die Geschwindigkeit reduzieren ? und das Drehmoment erhöhen M bis M und M mit dem Nicht gleich groß, d.h. aus dem stationären Regime mit einer höheren Geschwindigkeit, um in den stationären Modus mit einer niedrigeren Geschwindigkeit zu bewegen. Beim Abnehmen M mit dem das Gegenteil wird beobachtet - der Motor aus dem stationären Zustand mit einer niedrigeren Geschwindigkeit wird automatisch in den stationären Modus mit einer höheren Geschwindigkeit wechseln. Der Arbeitsabschnitt der mechanischen Charakteristik des Blutdruckes ist analog der mechanischen Charakteristik des DCT mit der unabhängigen Erregung - der geraden Linie, die zur Abszisse geneigt ist.
Solche Eigenschaften des Blutdrucks sind auf die EMK zurückzuführen. E 2 , die durch das rotierende Magnetfeld des Stators in der Wicklung des Rotors induziert wird. Wann? M mit dem \u003e M dynamischer Moment M d und Rotordrehzahl ? nimmt ab. Das Magnetfeld des Stators dreht sich mit konstanter Geschwindigkeit ? 0 (synchrone Geschwindigkeit) wird die Wicklung des Rotors mit einer hohen Frequenz kreuzen. Deshalb E 2 der Strom in der Rotorwicklung, wobei die Amperekraft auf ihre Windungen und somit das Drehmoment wirkt M.
Die Überlastfähigkeit der AD für den Moment wird durch das Verhältnis des kritischen Moments bestimmt M Zu zur Zeit des Nennwerts M H . Für herkömmliche AD mit einem Kurzschlussläufer M Zu / M H =1,7 mit einem Phasenrotor M Zu / M H =1,8 . Für spezielle Krandrücke mit einem Käfigläufer vom Typ MTK und einem Phasenrotor vom Typ MTKF ist das Verhältnis M Zu / M H = 2,3 h3,4.