Antipiretikët për fëmijët regjistrohen nga një pediatër. Por ka situata të kujdesit emergjent për ethe, kur fëmija ka nevojë të japë menjëherë mjekimin. Pastaj prindërit marrin përgjegjësinë dhe aplikojnë droga antipiretike. Çfarë mund të jepet fëmijëve? Si mund ta ulni temperaturën tek fëmijët më të rritur? Cilat medikamente janë më të sigurta?
Gjatë projektimit të makinës elektrike, motori duhet të zgjidhet në mënyrë të tillë që karakteristikat e tij mekanike të korrespondojnë me karakteristikat mekanike të mekanizmit të prodhimit. Karakteristikat mekanike japin ndërlidhjen e variablave në regjimet e qëndrueshme.
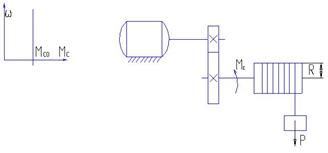
Karakteristika mekanike e mekanizmit quajtur marrëdhëniet ndërmjet shpejtësisë këndore dhe momentit të rezistencës së mekanizmit, të reduktuar në boshtin motorik) ω = f (Mc).
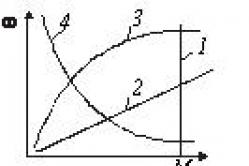
Fig. 1. Karakteristikat mekanike të mekanizmave
Midis varietetit janë disa lloje karakteristike të karakteristikave mekanike të mekanizmave:
1. Karakteristikë me momentin e rezistencës, jo në varësi të shpejtësisë (vijë e drejtë 1 në Figurën 1). Karakteristika mekanike e pavarur nga shpejtësia paraqitet grafikisht nga një linjë e drejtë paralele me aksin e rrotullimit, në këtë rast vertikal. Karakteristika të tilla janë, për shembull, heqjen e vinçave, çikrikëve, pompave me pistoni me një lartësi të vazhdueshme të ushqimit, etj.
2. Karakteristikë me momentin e rezistencës linearisht në varësi të shpejtësisë (vijë e drejtë 2 në figurën 1). Kjo varësi është e natyrshme, për shembull, në drejtimin e një gjeneratori të rrymës së drejtpërdrejtë me ngacmim të pavarur, i cili vepron në një ngarkesë konstante.
3. Karakteristikë me një rritje jolineare në moment (kurba 3 në Fig. Shembuj tipikë janë karakteristikat e tifozëve, pompave centrifugale, helikopterëve. Për këto mekanizma, momenti Mc varet nga sheshi i shpejtësisë këndoreω
. Kjo e ashtuquajtura. karakteristike mekanike parabolike (tifoz).
4. Karakteristikë me një moment jo rreshqitës të rezistencës (kurbë 4 në figurën 1). Këtu momenti i rezistencës është anasjelltas proporcional me shpejtësinë e rrotullimit. Fuqia në këtë rast mbetet konstante në të gjithë intervalin e shpejtësisë së operimit të mekanizmit. Për shembull, në mekanizmat e lëvizjes kryesore të disa makinave të prerjes së metaleve (kthimi, bluarja, mërzitja), momenti që Mc ndryshon në mënyrë inversi me ω dhe fuqia e konsumuar nga mekanizmi mbetet konstante.
Karakteristika mekanike e motorrit elektrik është varësia e shpejtësisë së saj këndore në çift rrotullues ω d = f (M) Këtu duhet të kihet parasysh se momenti M në boshtin e motorit, pavarësisht nga drejtimi i rrotullimit, ka një shenjë pozitive - momenti i lëvizjes. Në të njëjtën kohë, momenti i rezistencës Mc ka një shenjë negative.
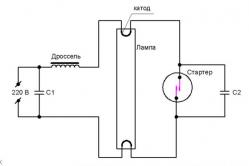
Si shembuj në Fig. 2 tregon karakteristikat mekanike: 1 - motor sinkron; 2 - Motor i drejtpërdrejtë i pavarur; 3 - një motor DC i ngacmimit të serive.
![]()
Fig. 2. Karakteristikat mekanike të motorëve elektrikë
Për të vlerësuar vetitë e karakteristikave mekanike të makinës elektrike, përdoret koncepti i ngurtësisë së karakteristikave. Ngurtësia e karakteristikave mekanike përcaktohet me shprehje
β = dM / dω
ku d M - ndryshoni momentin motorik; d ω d është ndryshimi korrespondues në shpejtësinë këndore.
Për karakteristikat lineare, vlera e β mbetet konstante, për ato jolineare, varet nga pika operative.
Duke përdorur këtë koncept, karakteristikat e paraqitura në Fig. 2, mund të vlerësohen cilësisht si më poshtë: 1 - absolutisht e ngurtë (β = ∞); 2 - i ngurtë; 3 - të butë.
Karakteristikë absolutisht e ngurtë - shpejtësia e motorit mbetet e pandryshuar kur ngarkesa e motorit ndryshon nga zero në nominale. Motorët sinkronë kanë këtë karakteristikë.
Karakteristika e ngurtë - shpejtësia e rrotullimit ndryshon pak kur ngarkesa ndryshon nga zero në nominale. Kjo karakteristikë ka një motor drejtues të drejtpërdrejtë me ngacmim paralel, si dhe një motor induksioni në rajonin e pjesës lineare të karakteristikës.
Karakteristikë e butë - shpejtësia e rrotullimit të motorit ndryshon në mënyrë të konsiderueshme me ndryshime relativisht të vogla në ngarkesë. Një karakteristikë e tillë është e pajisur me një motor DC me seri, ngacmim të përzier ose paralel, por me një rezistencë shtesë në qarkun e armatimit dhe gjithashtu asinkron me rezistencën në qarkun e rotorit.
Për shumicën e mekanizmave të prodhimit, përdoren motorët asinkronë me një rotor me kafaze, të cilat kanë një karakteristikë të ngurtë mekanike.
Të gjitha karakteristikat mekanike të motorëve elektrikë ndahen në të natyrshme dhe artificiale.
Karakteristikë natyrore mekanike i referohet kushteve të operimit të motorit me vlera nominale të parametrave.
Për shembull, për një motor me ngacmim paralel mund të ndërtohet një karakteristikë natyrore për rastin kur tensionet në armaturë dhe rryma e ngacmimit kanë vlera nominale dhe nuk ka rezistencë shtesë në qarkun e armatimit.
Karakteristika natyrore e një motori asinkron korrespondon me tensionin e vlerësuar dhe frekuencën e vlerësuar të rrymës alternative të furnizuar me stacionin e motorit, me kusht që nuk ka rezistencë shtesë në qark të rotorit.
Kështu, për çdo motor, një karakteristikë natyrore mund të ndërtohet vetëm një, dhe artificiale - një numër të pakufizuar. Për shembull, çdo vlerë e re e rezistencës së armaturës së motorit DC ose në zinxhirin e rotorit të një motori asinkron ka karakteristikën e vet mekanike.
Karakteristika mekanike statike e motorit quhet varësia e shpejtësisë në çift rrotullues të motorit. w = | (M). Pothuajse të gjitha motorët kanë pronësinë që shpejtësia e tyre është një funksion në rënie të çift rrotulluesit motorik. Kjo vlen për të gjithë motorët konvencionalë elektrike që përdoren në industri, domethënë për motorët DC të ngacmimit të pavarur, vijues dhe të përzier, si dhe për motorët asinkronë brushless dhe kolektorë AC. Megjithatë, shkalla e ndryshimit në shpejtësi me ndryshimin e çift rrotullues për motorë të ndryshëm është ndryshe dhe karakterizohet nga të ashtuquajturat ngurtësi karakteristikat e tyre mekanike.
Ngurtësinë e karakteristikave mekanike të makinës- është raporti i rritjes së çift rrotullimit të zhvilluar nga pajisja motorike elektrike, me një ndryshim në shpejtësi, në diferencën korresponduese në shpejtësitë këndore të makinës elektrike:
![]()
Në mënyrë tipike, në zonat e punës, karakteristikat mekanike të motorëve kanë një ngurtësi negative të β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Ngurtësia e një karakteristike mekanike në kuptimin gjeometrik është pjerrësia e karakteristikës mekanike të motorit.
Nëse krahasoni karakteristikat 1 dhe 2, karakteristika 1 është më e butë, sepse pjerrësia e saj është më pak
DМ 1\u003e DМ 2 Þ b 1\u003e b 2, që nga dhe.
Karakteristikat mekanike të motorëve elektrikë mund të ndahen në katër kategori kryesore:
1. Karakteristika mekanike absolutisht e ngurtë (β = ∞) është karakteristika në të cilën shpejtësia me ndryshimin e momentit mbetet e pandryshuar. Motorët sinkronë kanë këtë karakteristikë (vija e drejtë 1 në Fig. 1).
2. Karakteristika mekanike e ngurtë Kjo është një karakteristikë në të cilën shpejtësia me ndryshimin e çift rrotullues, edhe pse zvogëlohet, por në një masë të vogël. Një karakteristikë e ngurtë mekanike posedohet nga motorët DC të ngacmimit të pavarur, si dhe motorët asinkronë brenda pjesës së punës të karakteristikës mekanike (kurba 2 në Fig. 1).
Për një motor induksion, ngurtësia në pika të ndryshme të karakteristikave mekanike është e ndryshme. Midis vlerave maksimale (kritike) të momenteve në motorët Mk, q dhe gjeneratorit Mk, r modalitetet, karakteristika e motorit të induksionit ka një ngurtësi relativisht të lartë.
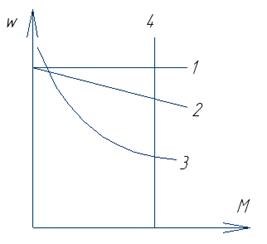 3. Karakteristikë e butë mekanike është një karakteristikë në të cilën shpejtësia ndryshon ndjeshëm me ndryshimin e momentit. Karakteristika të tilla janë të pajisura nga motorët DC të ngacmimit të serive, veçanërisht në zonën e momenteve të vogla (kurba 3 në Fig. 2). Për këta motorë ngurtësia nuk mbetet konstante për të gjitha pikat e karakteristikave.
3. Karakteristikë e butë mekanike është një karakteristikë në të cilën shpejtësia ndryshon ndjeshëm me ndryshimin e momentit. Karakteristika të tilla janë të pajisura nga motorët DC të ngacmimit të serive, veçanërisht në zonën e momenteve të vogla (kurba 3 në Fig. 2). Për këta motorë ngurtësia nuk mbetet konstante për të gjitha pikat e karakteristikave.
Motorët DC me ngacmim të përzier mund t'i caktohen grupit të dytë ose të tretë, varësisht nga vlera e ngurtësisë së karakteristikave mekanike.
4. Karakteristikë absolutisht e butë mekanike (β = 0) është një karakteristikë në të cilën shpejtësia këndore e motorit mbetet e pandryshuar. Karakteristika të tilla janë poseduar, për shembull, nga motorët e drejtpërdrejtë aktual të ngacmimit të pavarur kur i ushqejnë ato nga një burim aktual ose kur punojnë në sisteme të mbyllura të një rryme elektrike në mënyrën e stabilizimit të rrymës së armaturës (rreshti 4 në Figurën 2).
Karakteristikat mekanike të makinës së punës A varet shpejtësia e makinës së punës në momentin e rezistencës, që krijon w = | (M c).
Karakteristikat mekanike përshkruajnë ngarkesën në makinë elektrike.
Klasifikimi i ngarkesave tipike:
1. Momenti aktiv i rezistencës M c = const
Shembull: ngre çikrik.
Ngarkesa është në gjendje të aktivizojë vetë mekanizmin, prandaj quhet aktiv. Frenimi i parkimit duhet të sigurohet për ndërtimin.
2. Momenti reaktiv i rezistencës M c = const (ngarkesa e llojit të qëndrueshmërisë së momentit)
Tipike për mekanizma të tillë si "fërkimi i thatë".
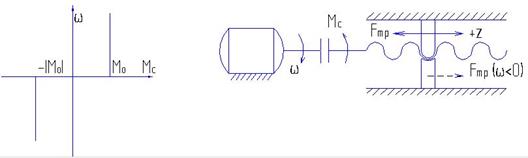
M c = shenjë M 0 (w).
w\u003e 0 Þ M c\u003e 0; w<0 Þ М с <0.
Momenti reaktiv është një reagim ndaj shpejtësisë w.
3. Fërkimi i trashë
M c = α BT ω
Momenti i rezistencës është proporcional me shpejtësinë.
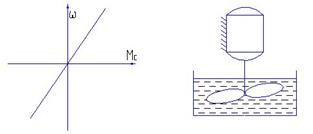
bw është koeficienti i fërkimit të trashë.
4. Momenti i ventilimit
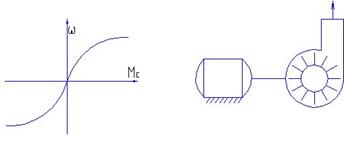
M c = kw 2 shenja (w).
Tipike për tifozët centrifugale dhe pompat.
Nëse hyrja është e mbyllur, çift rrotullimi i ngarkesës do të ulet.
P = M c w është fuqia.
5. Fuqia konstante P = const
Ku P c = const.
Shpesh përdoret për disqet kryesore të mjeteve të makinës (kthimi, bluarja, mërzitshmëria, bluarja dhe makina të tjera).
w max ∙ M min = min min ∙ M max = const.
Le të shqyrtojmë kthimin:
w = const, F p = const.
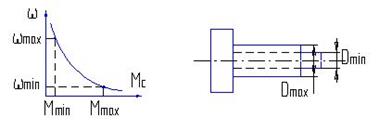

Për planer:
P 1 = v min ∙ F max - pike e punes, P 1 = v max ∙ F min - Pezullues.
P 1 »P 2 = const.
Karakteristikat e përzgjedhjes së motorit:
Në P 1 = 5 kW marrim P dv = 5 ∙ 100 = 500 kW.
Zgjedhja e drejtpërdrejtë e motorit nga vlerat kufi të çon në një mbivlerësim të fuqisë së instaluar të motorrit në kohë D w, ku D w është diapazoni i kontrollit të shpejtësisë. Në fakt, fuqia e motorit mund të reduktohet në mënyrë specifike, duke zgjedhur rangun e kontrollit të shpejtësisë.
Për DFT, HB është kontrolli i shpejtësisë për rrymat e ngacmimit.
Karakteristika mekanike e motorit quhet varësia e shpejtësisë së rrotullimit rotor nga momenti në boshtin n = f (M2). Meqë nën ngarkesë, çift rrotullimi i papërcaktuar është i vogël, atëherë M2 ≈ M dhe karakteristika mekanike përfaqësohet nga varësia n = f (M). Nëse marrim parasysh ndërlidhjen s = (n1 - n) / n1, atëherë karakteristika mekanike mund të merret duke paraqitur varësinë grafike të saj në koordinatat n dhe M (Fig.
Fig. 1. Karakteristika mekanike e një motor asinkrone
Karakteristika natyrore mekanike e një motorik induksioni korrespondon me skemën kryesore (pasaporta) të përfshirjes së saj dhe parametrat nominal të tensionit të furnizimit. Karakteristikat artificialejanë marrë nëse përfshihen elementë shtesë: resistors , reaktorëve , kapacitoreve . Kur motor është mundësuar nga një tension i pa vlerësuar, karakteristikat gjithashtu ndryshojnë nga karakteristikat natyrore mekanike.
Karakteristikat mekanike janë shumë i përshtatshëm dhe mjet i dobishëm për analizën e mënyrave statike dhe dinamike të makinës elektrike.
Pikat kryesore të karakteristikave mekanike: gabim kritik dhe frekuencë, çift rrotullues maksimal, çift rrotullues, çift rrotullues i vlerësuar.
Karakteristika mekanike është varësia e çift rrotullues në rrëshqitje, ose, me fjalë të tjera, në numrin e revolucioneve:
![]()
Nga shprehja 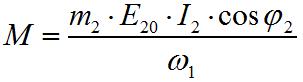 mund të shihet se kjo varësi është shumë e komplikuar, pasi, siç tregojnë formula)
mund të shihet se kjo varësi është shumë e komplikuar, pasi, siç tregojnë formula)  dhe
dhe  , shqip gjithashtu hyn në shprehje për unë 2
dhe cos? 2. Karakteristika mekanike e një motori asinkron zakonisht jepet në mënyrë grafike
, shqip gjithashtu hyn në shprehje për unë 2
dhe cos? 2. Karakteristika mekanike e një motori asinkron zakonisht jepet në mënyrë grafike
Pika fillestare e karakteristikës korrespondon me n = 0 dhe s = 1: ky është çasti i parë i fillimit të motorit. Çift rrotullues M n - një karakteristikë shumë e rëndësishme e vetive operacionale të motorit. Nëse M n i vogël, më i vogël se çiftëzimi operativ i vlerësuar, motori mund të fillojë vetëm në punë boshe ose me një ngarkesë mekanike përkatëse të zvogëluar.
Tregoni nga M np Çift rrotullues i kundërveprimit (frenimit) i krijuar nga ngarkesa mekanike në boshtin në të cilin fillon motor. Një kusht i qartë për mundësinë e fillimit të motorit është: M n > M np . Nëse ky kusht është plotësuar, rotori i motorit do të lëvizë, numri i revolucioneve të tij n do të rritet dhe do të rrëshqasë s për t'u ulur. Siç mund të shihet nga imazhi i mësipërm, çiftëzimi i motorit rritet nga M n në maksimum M m , që korrespondon me gabimin kritik s kp, prandaj, fuqia e tepërt e motorit në dispozicion, e përcaktuar nga ndryshimi në momente M dhe M np .
Sa më i madh dallimi në mes të çiftit motorik të disponueshëm (i mundshëm me një gabim të dhënë në karakteristikën e operimit) M dhe kundërshtuese M np , sa më e lehtë është mënyra e nisjes dhe sa më shpejt që motori të arrijë shpejtësinë e qëndrueshme të rrotullimit.
Siç tregon karakteristika mekanike, në një numër të caktuar të revolucioneve (në s = s kp) rrotullimi në dispozicion i motorit arrin maksimumin e mundshëm për motorin e dhënë (në një tension të dhënë U ) vlerave M t . Më tej, motor vazhdon të rrisë shpejtësinë e rrotullimit, por çift rrotullimi në dispozicion ulet me shpejtësi. Në disa vlera n dhe s çiftëzimi i motorit bëhet i barabartë me kundër-çiftëzimin: fillimi i motorit përfundon, shpejtësia e tij vendoset në vlerën që korrespondon me raportin:
![]()
Ky raport është i detyrueshëm për të gjitha kushtet e ngarkesës së motorit, domethënë për të gjitha vlerat M np , duke mos tejkaluar momentin maksimal të motorit në dispozicion M t . Brenda këtyre kufijve, motor automatikisht përshtatet me të gjitha luhatjet e ngarkesës: nëse gjatë operimit të motorit rritet ngarkesa mekanike, për një çast M np do të jetë më shumë se momenti i zhvilluar nga motori. Shpejtësia e motorit do të fillojë të ulet, dhe momenti do të rritet.
Shpejtësia e rotacionit është vendosur në një nivel të ri që korrespondon me barazinë M dhe M np . Kur ngarkesa të zvogëlohet, procesi i kalimit në regjimin e ngarkesës së re do të përmbyset.
Nëse çift rrotullimi i ngarkesës M np do të kalojë M t , motori menjëherë ndalet, si me zvogëlimin e mëtejshëm të shpejtësisë së motorit çiftëzimi i motorit zvogëlohet.
Prandaj, çift rrotullimi maksimal motorik M t quhet edhe momenti i përmbysjes ose kritik.
Nëse në momentin e formulës ![]() zëvendësim:
zëvendësim:
atëherë ne marrim:
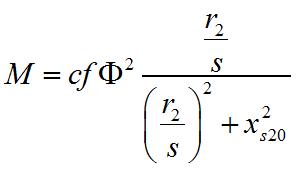
Marrja e derivatit të parë të M duke e barazuar atë me zero, ne gjejmë se vlera maksimale e çift rrotullues vjen kur:
që është, me të tillë rrëshqitje s = s kp , në të cilën rezistenca aktive e rotorit është e barabartë me rezistencën induktive
![]()
kuptim s kp shumica e motorëve asinkronë qëndrojnë në rangun e 10-25%.
Nëse në formulën e mësipërme të momentit në vend të rezistencës aktive r 2 zëvendësojnë induktivën nga formula
![]()
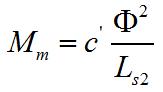
Çift rrotullues maksimal motor asinkron është proporcional me sheshin e fluksit magnetik (dhe kështu katrorin e tensionit) dhe anasjelltas proporcional me induktancën e shpërndarjes së mbështjelljes së rotorit.
Kur voltazhi i aplikuar në motor është i vazhdueshëm, fluksi i tij F mbetet pothuajse e pandryshuar.
Induktimi i shpërndarjes së zinxhirit të rotorit është gjithashtu praktikisht konstant. Prandaj, kur ndryshon rezistenca aktive në qarkun e rotorit, vlera maksimale e çift rrotulluesit M t Ajo nuk do të ndryshojë, por do të vijë në rrëshqitje të ndryshme (me një rritje në rezistencën aktive të rotorit - për vlerat e mëdha të gabimeve).
Natyrisht, ngarkesa maksimale e mundshme e motorit përcaktohet nga vlera e saj M t . Pjesa e punës e performancës së motorit qëndron në një gamë të ngushtë të shpejtësisë nga n, përkatëse M t , deri. në n = n 1 (pika përfundimtare e karakteristikës) M = 0, pasi në shpejtësinë e rotorit sinkron s = 0 dhe I 2 = 0.
Çift rrotullimi nominal që përcakton vlerën e fuqisë nominale të motorit zakonisht është marrë 0.4-0.6 nga M t . Kështu, motorët asinkronë lejojnë mbingarkesat e shkurtëra prej 2 - 2.5 herë.
Parametri kryesore që e karakterizon veprimin e motorit induksionit është rrëshqitje s - ndryshim relative midis shpejtësi të rotorit n dhe fushës n me: a = (n o - n) / n o.
Zona e karakteristikës mekanike që korrespondon me 0 ≤ s ≤ 1 është regjioni i regjimeve motorike, me s< s кр работа двигателя устойчива, при s > s cr është e paqëndrueshme. Për s< 0 и s > 1 çift rrotullimi motor drejtohet kundër drejtimit të rrotullimit të rotorit të tij (respektivisht frenimit rigjenerues dhe frenimit duke kundërshtuar).
Shpesh përshkruhet një pjesë e qëndrueshme e karakteristikave mekanike të motorit formulën Kloss , duke zëvendësuar në të parametrat e regjimit nominal, mund të përcaktohet slip kritik s cr:
 ,
,
ku: λ = M kp / M - kapaciteti i mbingarkesës i motorit.
Karakteristikat mekanike sipas katalogut ose të dhënave të katalogut mund të përafërsisht të ndërtohen në katër pika (Figura 7.1):
Pika 1 - Idling ideal, n = n o = 60 f / p, M = 0, ku: p - numri i palëve të poleve të fushës magnetike të motorit;
Pika 2 - modaliteti nominal: n = n, M = M = 9550 Pn / n, ku P - fuqia motorike e vlerësuar në kW;
Pika 3 - metoda kritike: n = n cr, M = M cr = λ M n;
Pika 4 - mënyra e fillimit: n = 0, M = M start = β M N.
Kur analizohen gamë të ngarkesës operativ motor për M n dhe karakteristikat pjesë disi më të qëndrueshme mekanike mund të përshkruhet afërsisht nga ekuacioni i një vijë të drejtë n = 0 n - në M, ku koeficienti "a" është përcaktuar lehtësisht duke zëvendësuar në parametrat e ekuacionit të vlerësuar shpejtësinë n n dhe m n.
Dizajni i mbështjelljes së statorit. Dredha-dredha me një shtresë dhe dy shtresa.
Sipas ndërtimin e mbështjellje janë të ndarë në mënyrë të rastësishme, plaga dredha-dredha spirale me mbështjellje butë dhe e vështirë gjarpëruese ose polukatushkami. Spiralet e butë janë bërë nga një tela izoluar rrumbullakët. Për të dhënë formën e dëshiruar, ato janë para-plagë në shabllonet dhe pastaj grumbullohen në groove të izoluara trapezoidale (shih Figura 3.4, në, gdhe 3.5, në); pads izolues interphase janë instaluar gjatë procesit dredha-dredha. Pastaj spirale përforcuar në lojëra elektronike me anë të wedges ose mbulon, për t'u dhënë atyre formën përfundimtare (të formuar pjesën ballore) kryhet banding dredha-dredha dhe impregnim e saj. E gjithë procesi i bërjes së mbështjelljeve të tipit V mund të jetë plotësisht i mekanizuar.
Spiralet e ngurtë (gjysmë-mbështjellës) janë bërë prej tela të izoluar drejtkëndëshe. Forma përfundimtare u jepet atyre para injektimit; në të njëjtën kohë ata mbivendosen në izolimin e trupit dhe fazën në fazë. Pastaj, mbështjelljet vendosen në groove para-izoluar të hapura ose gjysmë të hapura , forcuar dhe impregnuar.
1. Mbështjellje me një shtresë - më e përshtatshme për shtrimin e mekanizuar, meqë në këtë rast dredha-dredha duhet të jetë koncentrike dhe të futet në groove të statorit me të dy anët e spirales në të njëjtën kohë. Megjithatë, përdorimi i tyre çon në një rritje të konsumit të telit të mbështjellë për shkak të gjatësisë së konsiderueshme të pjesëve ballore. Për më tepër, në mbeshtjelljen të tilla nuk është e mundur për të ekzekutuar shkurtimin e hapave, e cila çon në përkeqësimin e fushës formë-magnet në boshllëk ajri, humbjet shtesë rritje, ndodhjen e dështimeve në karakteristikat mekanike dhe për të rritur në zhurmë. Megjithatë, për shkak të thjeshtësisë dhe dobësisë së tyre, mbështjellje të tilla përdoren gjerësisht në motorë asinkronë me kapacitet të vogël deri në 10-15 kW.
2. Layer Dual dredha-dredha- lejoni shkurtimin e katranit të dredhur në çdo numër të ndarjeve të dhëmbëve, duke përmirësuar kështu formën e fushës magnetike të prodhuar nga dredha-dredha dhe duke shtypur harmonikat më të larta në kurbën EMF. Përveç kësaj, me mbështjellje me dy shtresa, fiton një formë më e thjeshtë e lidhjeve ballore, e cila thjeshton prodhimin e mbështjelljeve. Mbështjellje të tilla përdoren për motorët me fuqi mbi 100 kW me mbështjellje të ngurtë që vendosen manualisht.
Mbështjellje statorësh. Mbështjellje me një shtresë dhe dy shtresa
Në grooves e bërthamës së statorit, ka një dredhje multifazësh, e cila është e lidhur me rrjetin e rrymës alternative. Dredhëzat simetrike me shumë faza me një numër fazash tato përfshijnë tqë lidhen me një yll ose poligonin. Pra, për shembull, në rastin e një thurjeje të statorit me tre faza, numri i fazave m =3 dhe mbështjelljet mund të lidhen me një yll ose trekëndësh. Mbështetja midis fazave kompensohet nga një kënd prej 360 / t përshëndesdin; për një dredhje trefazore, ky kënd është 120 °.
Mbështjelljet e fazës janë bërë nga spirale të veçanta të lidhura në seri, paralele ose seri paralele. Në këtë rast, spiralene nënkuptojmë disa mbështjellje të lidhura në mënyrë të njëpasnjëshme të rrotullimit të statorit të vendosura në të njëjtën groove dhe që kanë një izolim të përbashkët në lidhje me muret e zakonit. Nga ana tjetër revoluciondy aktive (dmth., Të vendosura në thelbin e statorit) dirigjent janë vendosur në dy groove nën polet e kundërta ngjitur dhe lidhur me njëri-tjetrin në seri. Drejtuesit e vendosur jashtë bërthamës së statorit dhe lidhja e përçuesve aktivë me njëri-tjetrin quhen pjesët ballore të mbështjelljes. Pjesët e drejtkëndëshme të mbështjellësve të mbështjelljeve, të vendosura në groove, quhen anët e mbështjellësave ose groove.
Rrathët e statorit në të cilat mbërthen mbulesat formojnë të ashtuquajturat dhëmbë në anën e brendshme të statorit. Distanca ndërmjet qendrave të dy dhëmbëve ngjitur të bërthamës së statorit, e matur përgjatë sipërfaqes së saj përballë hendekut të ajrit, quhet ndarjen e dhëmbëveose ndarje slot.
Dredhëzat spirale cilindrike me shumë shtresa (Figura 3) janë plagë nga një tela e rrumbullakët dhe përbëhen nga mbështjellësa të diskut shumë shtresash të vendosura përgjatë shufrës. Midis spiraleve (përmes secilës spirale ose përmes dy ose tre mbështjellësve) mund të lihen kanale radiale për ftohje. Mbështjellje të tilla përdoren në anën e tensionit të lartë kur S ≤ 335 kV × A, unë ≤ 45 A dhe U ltr ≤ 35 kV.
Teknikat cilindrikë me një shtresë dhe dy shtresa (Figura 4) janë plagë nga një ose disa (deri në katër) përçues drejtkëndor paralel dhe përdoren për S ≤ 200 kV × A, unë ≤ 800 A dhe U ltr ≤ 6 kV.
TEMA E LIGJES 10
Karakteristikat mekanike të motorëve elektrikë
PLANI I LEKURES
1. Natyrore dhe artificialekarakteristikat mekanikemotorët elektrikë
- ngurtësi karakteristikat mekanike
- Karakteristika natyrore mekanike e një motor drejtues të drejtpërdrejtë të ngacmimit paralel
- Karakteristikë natyrore mekanike
- natyror
- Karakteristikë mekanike e një motori sinkron. Fusha e motorëve sinkron në anije
Karakteristika mekanike e motorit, pavarësisht nga lloji i rrymës, është varësia e shpejtësisë këndore të boshtit motor ω (në tekstin e mëtejmë referuar si motor) në momentin elektromagnetik të motorit, përkatësisht varësisë ω (ω).
Këtu duhet të bëjmë një vëzhgim të rëndësishëm: në përputhje me ekuacionin e momenteve, në gjendjen e qëndrueshme =, momenti elektromagnetik i motorit kundërbalancuar Momenti statik (momenti rezistencë ohm) mekanizëm. Kjo do të thotë se madhësia e momentit elektromagnetik të motorit varet tërësisht nga momenti i mekanizmit?? Sa më shumë çift rrotullues i mekanizmit, aq më i madh është çift rrotullimi i motorit dhe anasjelltas.
Kjo është, për çdo motor, vlera e hyrjes është momenti i mekanizmit dhe produkti?? shpejtësinë e saj.
Shpejtësia e pothuajse të gjitha motorëve elektrikë është një funksion në rënie të çift rrotulluesit motorik, që është, me çift rrotullues në rritje, shpejtësia zvogëlohet [ftohja 33]. Por shkalla e ndryshimit të shpejtësisë për motorët e ndryshëm elektrikë është e ndryshme dhe karakterizohet nga një parametër ngurtësi e karakteristikave mekanike.
ngurtësi karakteristikat mekanike të makinës elektrike β ky raport i diferencës së momenteve elektromagnetike të motorit me shpejtësi të ndryshme deri te ndryshimi përkatës në shpejtësitë këndore të drejtimit elektrik.
β = (M2 / M1) / (ω2 = ω1) = Δ / Δω
Zakonisht në zonat e punës karakteristikat mekanike të motorëve elektrikë kanë ngurtësi negative β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
dalloj natyrore dhe artificialekarakteristikat mekanikedhe motorët elektrikë.
Karakteristikë natyrore mekanike ?? kjo është varësia ω (), e marrë në mënyrë normale kushtet e motorit të operimit, dmth. në parametrat nominalë rrjetit të furnizimit dhe mungesa e rezistencave shtesënë zinxhirët e mbështjelljes së motorëve.
Parametrat e furnizimit me rrjetin janë: me një rrymë të vazhdueshme? tension, me rrymë të alternuar ?? tensionit dhe frekuencës së rrymës.
Karakteristikat e marra në kushte, ndryshe nga normale, i quajtur artificial.
Karakteristikat artificiale mund të merret nga modifikuar parametrat motor, p.sh., duke futur një rezistencë të motorit armature DC gjarpërim qark ose në rotor motorik induksion gjarpërim qark, ose të ndryshojë parametrat rrjeta, p.sh. tensionin dhe frekuencën e rrymës alternative.
Çdo motor elektrik ka një natyrore dhe vendosur artificial Karakteristikat. Numri i karakteristikave artificiale varet nga numri i fazave të elementit rregullues, për shembull, numri i hapave të reostatit të kontrollit në qarkun e mbështjelljes së armaturës me motor DC. Nëse motori i fazave të tilla? pesë, atëherë ky motor ka gjashtë karakteristika ?? pesë artificiale dhe një natyrore.
Karakteristikat mekanike artificiale përdoren për të siguruar mënyra të tilla të përdorimit të motorit si kontrollimi i shpejtësisë, mbrapa, frenimi elektrik etj.
Konsideroni natyrores karakteristikat mekanike të motorëvelloje të ndryshme.
Fig. 10.1 Karakteristikat natyrore mekanike (a) dhe këndore (b) të motorit sinkron; θ këndi i retardimit të boshtit të rotorit nga boshti i fushës magnetike të mbështjelljes së statorit
Karakteristika natyrore mekanike e një motori sinkron
Mekanike natyroretipar motor sinkron(Figura 10.1a)? absolutisht e ngurtë?? kjo është karakteristike në të cilënshpejtësia me ndryshimin e momentit nuk ndryshon, ngurtësia e tij (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C tabilnost sinkron motor Rotori shpejtesia kendore shpjegohen karakteristikat e këndit motorik sinkron () si më poshtë (Fig. 10.1 b), nëse ngarkesa mekanik nuk është aplikuar në rotor, aksi i rotorit dhe rrotulluese fushë magnetike i mbeshtjelljen statorit janë të njëjtë, dmth, θ = 0 ° (pika 0 në figurën 10.1 b). Nëse momenti elektromagnetik i motorit është M = 0, motori është në punë boshe.
Nëse aplikoni ngarkesën mekanike në boshtin motorik dhe rrisni atë, rotorja do të mbetet prapa fushës magnetike të mbështjelljes së statorit nga një kënd mekanike në rritje θ.
Sa më i madh ngarkesa mekanike në bosht, aq më e madhe është ky kënd dhe sa më i madh është momenti rrotullues elektromagnetik i motorrit.
kjo rritja e njëkohshme e çift rrotullues motor, shkaktuar nga një rritje në momentin e frenimit të mekanizmit vetëm siguron stabilitetin e shpejtësisë së motorit (në figurën 10.1 një seksion karakteristik është nga = 0 në =).
Megjithatë, qëndrueshmëria e shpejtësisë së motorit mbahet për aq kohë sa këndi θ ≤ 90 °. Në θ = 90 °, motor zhvillon momentin kritik (maksimum) (pika A në Fig. 10.1 a).
Nëse θ = 90 ° përsëri për të rritur ngarkesën mekanike (θ\u003e 90 °), çift rrotullues elektromagnetike e motorit do të ulet (karakteristikat e segmentit AB këndore), dmth ky moment do të jetë më i vogël se çiftëzimi i frenave të mekanizmit. Si rezultat, shpejtësia e rotorit të motorrit do të ulet dhe përfundimisht rotor do të ndalet.
Meqenëse shpejtësia e rotorit është më e vogël se shpejtësia e fushës magnetike rrotulluese të dredhurit të statorit, thuhet se motori ka rënë nga sinkronizmi.
Si më poshtë nga karakteristika këndore e motorit, kushti për humbjen e motorit nga sinkronizimi është: θ≤90 °.
Në praktikë, këndi nominal është θ = 20 ... 40 °.
Fusha e motorëve sinkron: në anije ?? si motorë me rrema elektrike, vida rrotulluese; në breg ?? për ngarje mekanizmave të fuqishëm, për shembull, kompresorë në stacionet e pompimit të gazit.
Karakteristika natyrore mekanike e një motor DC
natyror karakteristike mekanike e një motor DCngacmim paralel (Figura 8.5) ??w e stkaya, sepse ngurtësia e saj
β = Δ / Δω ≤ 10%.
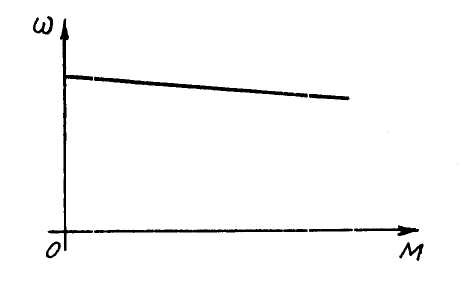
Fig. 10.2 Natyrale karakteristike mekanike e motorit aktual paralel të rrymës
Kjo do të thotë se kur momenti elektromagnetik i motorit ndryshohet brenda një game të gjerë, shpejtësia e tij është mjaft e qëndrueshme (dmth., Ndryshon në mënyrë të parëndësishme).
Motorë të tillë përdoren aty ku, kur ngarkesa e mekanizmit ndryshon brenda kufijve të gjerë, shpejtësia e motorit nuk duhet të ndryshojë ndjeshëm? në disqet elektrike të pompave, tifozëve etj.
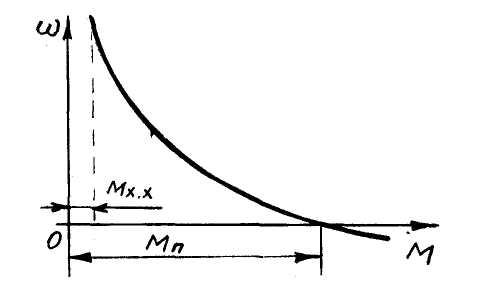
Fig. 10.3 Natyrale karakteristike mekanikenjë motor drejtpërdrejt DC aktual
natyror karakteristikë mekanike e një motor DC të ngacmimit të serive (Fig. 10.3) ?? butë , për shkak të ngurtësisë së saj
β = Δ / Δω\u003e 10%.
Kjo do të thotë se kur momenti elektromagnetik i motorit ndryshon, madje edhe brenda një distancë të vogël, shpejtësia e saj ndryshon ndjeshëm.
Le të kujtojmë dy tipare karakteristike të këtij motorri një motor drejtpërdrejt DC aktual:
- Me një reduktim të ngarkesës mekanike në bosht ose mungesa e saj (=)
shpejtësia e motorit rritet ndjeshëm, motori "shkon me pedale". Prandaj, ky motor nuk mund të lihet i shkarkuar në bosht;
- Në fillim të motorit, motorët zhvillojnë momentet fillestare më shumë se llojet e tjera të motorëve.
Këto motorë nuk përdoren në anije, por përdoren në breg, për shembull, në transportin elektrik, në veçanti, në autobusë karrocë, ku ato nuk mbesin të shkarkuara në bosht dhe ku kërkohet momente të mëdha fillimi (kur karroca fillon të lëvizë).
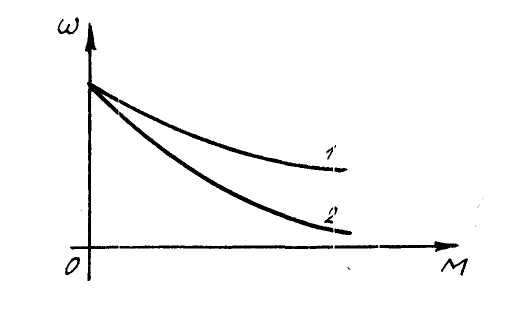
Fig. 10.4 Dashuri karakteristikat mekanike të motorëve DC të ngacmimit të përzier: 1 s ngacmim paralel-vijues;
2-s në vijimësi ngacmim paralel
natyror karakteristika mekanike e motorit të ngurtësuar me ngacmim DC është ndërmjetëse midis karakteristikave të motorëve paralelë dhe sekuencarë, fluksi magnetik i ngacmimit është krijuar nga veprimi i përbashkët i të dy mbesave ?? paralel dhe serial.
Ekzistojnë dy lloje motorësh ngacmimi të përzier:
- me paralele? në të cilën pjesa kryesore e fluksit magnetik rezultues është krijuar nga një mbështjellje paralele (deri në 70%, pjesa e mbetur prej 30% sekuenca);
2. me sekuenciale paralel, në të cilën pjesa kryesore e fluksit magnetik që rezulton gjenerohet nga një dredhje në seri (deri në 70%, pjesa e mbetur prej 30%?? paralele).
Prandaj, grafiku i karakteristikave mekanike të motorit të tipit të parë është më i ngurtë se ai i motorit të dytë.
Të dyja karakteristikat mekanike?? butë , sepse ngurtësia e tyre
β = Δ / Δω\u003e 10%.
Për anijet, motorët e ngacmimit të përzier përdoren në disqet elektrike të rregulluara? çikrikë, çezmat, anvoletë dhe gryka.
Karakteristika natyrore mekanike e një motorik induksioni
natyror karakteristika mekanike e një motor induksioni ka dy seksione ?? jo-pune (përforcues) AB dhe avionët e punësD (Figura 8.8).
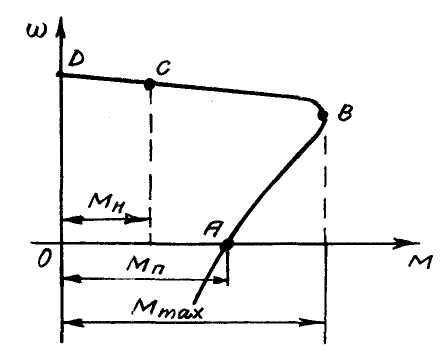
Fig. 10.5 Dashuri karakteristike mekanike e një motor induksioni
Në momentin e fillimit motor zhvillon çift rrotullues(segment OA), pas së cilës ajo përshpejtohet përgjatë rrugës ABC deri në pikën C. Në të njëjtën kohë në pjesën AB, shpejtësia dhe momenti rriten, në pikën B motor zhvillon momentin maksimal. Në seksionin e avionit, shpejtësia vazhdon të rritet, dhe momenti zvogëlohet, në nivelin nominal (pika C). Në vendBC motori është i mbingarkuar, t. kudo në këtë seksion çift rrotullimi elektromagnetik i motorit është më i madh se çift rrotullimi i vlerësuar (> >).
Nën kushte normale, motori shkon në seksionin CD , ngurtësinë e së cilës
β = Δ / Δω < 10%.
Kjo do të thotë se kur çift rrotullimi varion mbi një gamë të gjerë, shpejtësia e motorit ndryshon pa mëdyshje.
Motorët asinkronë kanë gjetur aplikimin më të gjerë në anijet me një central të energjisë AC.
Industria prodhon posaçërisht për anijet motore asinkrone të seri të ndryshme, për shembull, 4A ... OM2 (motors seri katërt asinkron), MAP (Marine polyusopereklyuchaemy asinkron), MTF (c plagë rotorit) dhe të tjerët.
Kështu motorët e një serie 4A ?? një shpejtësi të vetme, seri MAP? dy dhe tre shpejtësi, seri MTF ?? numri i shpejtësive përcaktohet nga skema e kontrollit (deri në 5 shpejtësi).
Leksion 7.
2.5. Karakteristikat mekanike të një motor DC me ngacmim seri. Modaliteti i motorit
Skema për ndezjen e motorit është paraqitur në Fig. 2.8. Armatura motorike M dhe gjilpërë e ngacmimit LM janë të lidhura në seri dhe furnizohen nga një burim i vetëm U. Prandaj, armatura aktuale unë unë është gjithashtu e tanishme e ngacmimit unë në . Kjo rrethanë përcakton dallimin vetëm në hartimin e motorit me ngacmim të njëpasnjëshme të motorit me ngacmim të veçantë: ngacmim dredha-dredha LM DPT me dirigjent ngacmim seri bërë nga të njëjtit seksion kryq si ai i armaturë dredha-dredha.
Fig. 2.8. Diagrami i përfshirjes së DCT me ngacmim të njëpasnjëshëm.
Me një armature rrotulluese në dredha-rimin e saj, nxitet një EMF. rrotullim ^ E. Në skemën e kalimit të drejtimit të motorit E kundër drejtimit U, e cila korrespondon me mënyrën e operimit motorik. vlerë E është e barabartë me:
ku ?
- shpejtësia këndore e motorit; F - rrjedhjen e motorit;  - Koeficienti konstruktiv i të dhënave motorike për llogaritjen, të cilat janë dhënë në librat referencë. këtu r - numri i çifteve të shtyllave motorike; N - numri i përçuesve të mbështjelljes aktive të armatimit; dhe - numri i palëve të degëve paralele të mbështjelljes së armaturës.
- Koeficienti konstruktiv i të dhënave motorike për llogaritjen, të cilat janë dhënë në librat referencë. këtu r - numri i çifteve të shtyllave motorike; N - numri i përçuesve të mbështjelljes aktive të armatimit; dhe - numri i palëve të degëve paralele të mbështjelljes së armaturës.
Drejtimi i rrymës së ankorimit unë unë , si drejtimi E në diagramin e kyçjes është treguar për mënyrën e operimit motorik.
Vlera e lejuar e rrymës ankoruese të motorëve unë unë shtoj është i kufizuar nga kushtet e kalimit dhe fuqia mekanike e armaturës dhe nuk duhet të tejkalojë rrymën e vlerësuar unë yang më shumë se 2.5 herë unë unë shtoj ? 2.5 I yang .
Në përputhje me ekuacionin ekuilibrit të stresit në operacion të qëndrueshme motor, tension U, aplikuar në qark motor armaturë është i balancuar nga rënia e tensionit në qark armaturë unë unë R lepur dhe nxitur në gjilpëra armatura EMF. rrotullim E:
U = I Я R ЯЦ + Е
ku R lepur = R unë + R PD + R KO + R Në + R P - rezistenca totale e zinxhirit të ankorimit. këtu R unë rezistenca e mbështjelljes së armaturës; R PD - rezistenca e dredhjes së shtyllave shtesë; R KO - rezistenca e dredhurimit të kompensimit; R Në - Rezistenca e mbështjelljes së eksitimit; R P - Rezistenca e reostatit fillestar.
vlerë unë unë në gjendje të qëndrueshme do të jetë:
Në regjimin e fillimit ^ E = 0, prandaj, për shkak të rezistencës së vogël të mbështjelljes, rryma fillestare unë I P mund të kalojë vlerën e lejuar. Për të kufizuar rrymën e fillimit, përdoret një reostat fillestar, rezistenca e të cilit R P është zgjedhur në mënyrë të tillë që unë I P ? unë Unë jam një DOP
Nga ekuacioni i ekuilibrit të stresit për zinxhirin e ankorimit, mund të merret një shprehje analitike për karakteristikat mekanike të motorit.
Zëvendësuar atë në vend të emf. rrotullim ^ E vlerën e saj dhe zgjidhjen e ekuacionit që rezulton në lidhje me shpejtësinë, marrim varësinë e shpejtësisë së motorit ? nga rryma e armaturës unë unë ? = f (I unë ) , e cila quhet karakteristikë elektromekanike:
Meqenëse dredha ngacmimi është lidhur në seri me armaturë motorike, fluksi magnetik i gjeneruar nga ai ^ Φ është një funksion i armaturës aktuale unë unë . varësi Ф = f (I unë ) quhet kurba e magnetizimit dhe ka një karakter jolinear të tipit të "zonës së ngopjes". Nuk ka përshkrim të saktë analitik të kësaj kurse, kështu që nuk ka përshkrim të saktë analitik të karakteristikave mekanike të DPT me ngacmim të njëpasnjëshëm. Nëse, duke shpërfillur ngopjen e sistemit magnetik, supozojmë një marrëdhënie lineare mes F dhe unë unë me një koeficient proporcionaliteti ?, që është, Ф =? I unë , atëherë çift rrotullimi është:
M = kΦI H = k? I H 2
Prandaj vlera e armaturës aktuale do të jetë:
Duke zëvendësuar në ekuacionin e karakteristikës elektromekanike vlera për unë unë , ne marrim ekuacionin e karakteristikave mekanike:
ku A = U / k; B = R lepur / (k?) - vlera konstante.
Një analizë e ekuacionit të përftuar tregon se boshti i ordinatit është një asymptotë për kurbën dhe se në rajonin e vlerave të vogla të momenteve ajo ka një pjerrësi të madhe
në R P =0 dhe U = U n motori funksionon me një karakteristikë natyrore. Për të ndërtuar një karakteristikë natyrore, përdoren të ashtuquajturat karakteristikat universale, të cilat jepen në katalogët për secilën seri të motorëve. Ato përfaqësojnë varësi n = f (I unë ) dhe M = f (I unë ) në njësi relative. Duke ditur të dhënat nominale të motorit, është e mundur të ndërtohet karakteristika e tij në vlera absolute. Kjo karakteristikë është treguar në Fig. 2.9.
Fig. 2.9. Karakteristikat mekanike të motorit DC të ngacmimit të serive.
Një karakteristikë e karakteristikës është një rritje e mprehtë e shpejtësisë me një rënie në momentin e rezistencës M me . Prandaj, një motor DC me ngacmim seri nuk mund të fillojë në ato raste kur M me n , pasi shpejtësia e motorit mund të kalojë vlerën e lejuar ?
plotësues =2,5 ?
n . Ky funksion mund të shpjegohet duke marrë parasysh proceset që ndodhin në motor me një ulje të ngarkesës. Le të supozojmë se motori ka punuar në pikën A në karakteristikën natyrore (shih Figurën 2.9.) Në gjendje të qëndrueshme me shpejtësi ?
1
. Kur momenti i rezistencës zvogëlohet nga vlera M c1 për shembull, deri në M s2 , shfaqet një moment pozitiv dinamik M D >0
dhe shpejtësia e motorit fillon të rritet. Me ngacmim të pavarur, pasoja e kësaj është një rritje në emf. rrotullim  dhe një rënie në rrymën e armaturës
dhe një rënie në rrymën e armaturës  dhe çift rrotullues
dhe çift rrotullues  . Rritja e shpejtësisë dhe reduktimi i çiftit motorik do të vazhdojë deri në çift rrotullues motorik M në do të bëhet e barabartë M s2 dhe M D bëhet zero.
. Rritja e shpejtësisë dhe reduktimi i çiftit motorik do të vazhdojë deri në çift rrotullues motorik M në do të bëhet e barabartë M s2 dhe M D bëhet zero.
Me ngacmim të njëpasnjëshëm të emf. rrotullim E rezulton të jetë një funksion i dy sasive - rritja e shpejtësisë ? dhe uljen e rrjedhjes F. Si rezultat, sasia E, dhe kështu sasitë unë unë dhe M, me një rritje në shpejtësinë nuk do të ndryshojë ndjeshëm, e cila çon në ruajtjen e M D >0 dhe rritje të mëtejshme në shpejtësi. Nëse rezistenca e reostatit fillestar R P >0 , pastaj rënie statike të shpejtësisë ?? me në të njëjtin moment të motorit do të jetë më shumë se në karakteristikën natyrore. Prandaj, karakteristikat e reostatit do të kenë një prirje të madhe drejt boshtit të abscisës.
Me ngacmim të njëpasnjëshëm, çift rrotullimi është proporcional me sheshin e rrymës së armaturës  dhe kufizimin e rrymës fillestare të vlerës unë Unë jam një DOP ? 2.5I YANG na lejon të marrim shumë më tepër sesa me një ngacmim të pavarur M ADVANCED = 5 M H . Faktori i tejkalimit motorik DC me ngacmim seri nga çift rrotullues
dhe kufizimin e rrymës fillestare të vlerës unë Unë jam një DOP ? 2.5I YANG na lejon të marrim shumë më tepër sesa me një ngacmim të pavarur M ADVANCED = 5 M H . Faktori i tejkalimit motorik DC me ngacmim seri nga çift rrotullues
K P = M ADVANCED / M H është e barabartë me pesë. Ky kapacitet mbingarkesë nuk posedon më shumë se një motor elektrik. Falë kësaj prone, motorët me ngacmim të vazhdueshëm përdoren në transportin elektrik dhe në mekanizmat ngritës.
Leksioni 8.
^ 2.6. Karakteristikat mekanike të një motor DC me ngacmim seri. Mënyra e frenimit elektrik.
Ekzistojnë dy mënyra të frenimit elektrik: frenim dinamik dhe frenim duke iu kundërvënë. Ndalimi rigjenerues nuk është i mundur, pasi emf. rrotullim Enuk mund të jetë më shumë se një tension i burimit të ankorimit U.
^ Frenim dinamik është realizuar në dy mënyra: me vetë-ngacmim dhe me ngacmim të pavarur. Skema për ndezjen e motorit dhe karakteristikat mekanike për rastin e parë janë paraqitur në Fig. 2.10.
Fig. 2.10. a) skemën e kalimit të motorit në mënyrën e frenimit dinamik me vetë-ngacmim;
B) karakteristikat e motorit në mënyrën e frenimit dinamik me vetë-ngacmim.
Motori është i shkyçur nga voltazhi i burimit dhe gjilpëra në fushë është e ndezur në mënyrë të tillë që drejtimi i rrymës unë Në në të ishte e njëjtë me atë në motor (shih Figura 2.8). Ky mbajtje e drejtimit aktual eliminon shkatërrimin e një fluksi të vogël të mbetur të lidhur me magnetizimin e stacionit të motorit. Ky lumë është shkaku vetë-ngacmim: në armaturë dredha-dredha, një rotacion nën veprimin e forcave inerciale në të njëjtin drejtim, EMF detyruar E, drejtimi i së cilës është i njëjtë me atë të motorit. Nën veprimin e E Një rrymë shfaqet në qarkun dinamik të frenimit, i cili çon në një rritje në fluksin e Ф, emf. E dhe aktuale unë unë . Që nga rryma unë unë në lidhje me regjimin e motorit ka drejtim të kundërt, çift rrotullimi i motorit bëhet frenues. Motor nga pika A në kuadrantin e parë kalon në pikën B ose C mbi karakteristikën e frenimit dinamik në kuadrantin e dytë. Fillimisht, procesi i vetë-ngacmim është shumë intensive, dhe kjo çon në roll çift rrotullues frenave aftë për të shkaktuar goditje në pjesën mekanike të actuator. Prandaj, frenimi dinamik me ngacmim të pavarur përdoret më shpesh. Skema për ndezjen e motorit dhe karakteristikat mekanike tregohen në Fig. 2.11.
Fig. 2.11. a) Skema për ndezjen e motorit në dinamik
Frenim me ngacmim të pavarur;
B) karakteristikat e motorit në dinamikë
Frenimi me ngacmim të pavarur.
Shtrëngesat e armatimit motorik janë të shkurtër në rezistencën dinamike të frenimit R DT , dhe mbështjellja e fushës lidhet me tensionin e burimit nëpërmjet rezistencës R Në . Rryma në të është e drejtuar si në modalitetin e motorit dhe është vendosur e barabartë me atë nominale. Karakteristikat janë të ngjashme me ato të DCT me ngacmim të pavarur: ato janë lineare, të vendosura në kuadrantin e dytë dhe kalojnë përmes origjinës.
^ Ndalesa e ngadalësimit Sa për DPT me ngacmim të pavarur kryhet në rastin kur mbeshtjelljen motor janë përfshirë në një drejtim të rrotullimit, dhe armaturë motor nën ndikimin e forcave të inercisë apo momentin e rezistencës e aktiv është ndërruar në të kundërt drejtim - përfshirjes.
Një skemë e kthyeshme për kalimin në DCT me ngacmim të njëpasnjëshëm tregohet në Fig. 2.12.
![]()
Fig. 2.12. Skema e kthyeshme e kalimit në DCT me ngacmim seri.
Qëllimi i elementëve është i njëjtë si në qarkun në Fig. 2.5. Kur motor kthehet nga ana e armaturës, drejtimi i tanishëm në LM i mbështjelljes së ngacmimit ruhet. Prandaj, të gjitha proceset gjatë frenimit janë analoge me ato që ndodhin në qark në Fig. 2.5. Karakteristikat e motorit tregohen në Fig. 2.13.

Fig. 2.13.a) karakteristikat e DCT me ngacmim të njëpasnjëshëm në mënyrë të ngadalësuar nga antikoincidence.
B) karakteristika të ngjashme me M s aktiv.
Leksioni 9.
^ 2.7. Karakteristikat mekanike të motorëve të induksionit. Modaliteti i motorit.
Motorët asinkron (AD) - lloji më i zakonshëm i motorëve, sepse ato janë më të thjeshta dhe më të besueshme në punë, me fuqi të barabartë kanë një masë më të vogël, përmasa dhe kosto në krahasim me DPT. Skemat për përfshirjen e tensionit të gjakut janë paraqitur në Fig. 2.14.
Deri kohët e fundit, një rotor i shkurtër është përdorur në disqet elektrike të parregulluara. Megjithatë, me ardhjen e converters Tiristori frekuencave (TFC) furnizimi me tension të BP stator dredha motorët kafaz filloi të përdoret në disqet kontrolluara elektrike. Aktualisht, transistorët e fuqisë dhe kontrollorët e programueshëm përdoren në konvertuesit e frekuencave. Metoda e rregullimit të shpejtësisë quhet impuls dhe përmirësimi i tij është drejtimi më i rëndësishëm në zhvillimin e makinës elektrike.
Fig. 2.14. a) skemën e kthimit në AD me një rotori me kafaze;
B) Skema për kalimin në AD me një rotor fazor.
Ekuacioni për karakteristikën mekanike të presionit të gjakut mund të merret në bazë të skemës së zëvendësimit të presionit të gjakut. Nëse neglizhojmë rezistencën aktive të statorit në këtë qark, shprehja për karakteristikat mekanike do të duket si:
 ,
,
ku  ;
;  .
.
këtu M në – moment kritik; S në - rrëshqitja kritike përkatëse; U f - vlera efektive e tensionit fazor të rrjetit; ? 0 = 2? F / f - shpejtësia këndore e fushës magnetike rrotulluese AD (shpejtësia sinkron); f Frekuenca e tensionit të furnizimit; p - numri i palëve të shtyllave të presionit të gjakut; x në - Rezistenca e shkurtër e qarkut të fazës induktive (e përcaktuar nga qarku i zëvendësimit); S = (? 0 -?)/? 0 - rrëshqitje (shpejtësia e rotorit në lidhje me shpejtësinë e fushës së rradhës); R 2 1 - Rezistenca totale aktive e fazës së rotorit.
Karakteristika mekanike e një AD me një rotori ketri-kafkë është treguar në Fig. 2.15.
Fig. 2.15. Karakteristikë mekanike e një rotori të shkurtër.
Ka tre pika karakteristike mbi të. Koordinatat e pikës së parë ( S = 0; ? =? 0 ; M = 0). Ajo korrespondon me mënyrën ideal të boshe, kur shpejtësia e rotorit është e barabartë me shpejtësinë e fushës magnetike të rradhës. Koordinatat e pikës së dytë ( S = S në ; M = M në). Motori punon me çift rrotullues maksimal. në M me \u003e M në rotor motor do të detyrohet të ndalojë, e cila për motorin është një regjim i qarkut të shkurtër. Prandaj, çift rrotullimi i motorit në këtë pikë quhet kritik M në . Koordinatat e pikës së tretë ( S = 1; ? = 0; M = M n). Në këtë pikë, motori vepron në mënyrën e fillimit: shpejtësia e rotorit = 0 dhe çiftëzimi i nisjes vepron në rotorin fiks M n . Pjesa e karakteristikave mekanike e vendosur midis pikës së parë dhe të dytë karakteristike quhet seksioni i punës. Në të, motori shkon në gjendje të qëndrueshme. Me një rotor të shkurtër, nëse janë kushtet U = U n dhe f = f n një karakteristikë mekanike quhet natyrore. Në këtë rast, në pjesën e punës së karakteristikës ekziston një pikë që korrespondon me mënyrën nominale të operimit të motorit dhe me koordinatat ( S n ; ? n ; M n).
Karakteristikat elektromekanike të presionit të gjakut ? = f (I f ) I cili në ris.2.15 treguar nga linjat thye, në kontrast me karakteristikat elektromekanike të DPT, përkon me karakteristikën mekanike vetëm në zonën e tij të punës. Kjo është për shkak të faktit se gjatë fillimit për shkak të ndryshimit të frekuencës së emf. në rrotullimin e rotorit E 2 Ajo ndryshon frekuencën aktuale dhe raporti i rezistencën induktiv dhe aktive gjarpëruese duke filluar në fillim të frekuencës aktuale dhe reaktancë mëdha induktiv më aktive; me rritjen e shpejtësisë së rotorit ? frekuenca e rrymës së rotorit dhe rrjedhimisht rezistenca induktive e mbështjelljes së tij, zvogëlohet. Prandaj, rryma hyrëse e AD në mënyrën e fillimit të drejtpërdrejtë është 5-7 herë më e lartë se vlera nominale unë lb , dhe çift rrotullues fillestar M n është e barabartë me atë nominale M n . Ndryshe nga DPT, ku në fillimin e aktivitetit është e nevojshme për të kufizuar duke filluar aktuale dhe duke filluar çift rrotullues, kur duke filluar presionin e gjakut është e nevojshme për të kufizuar turr aktuale, dhe çift rrotullues rritjen. Rrethi i fundit është më i rëndësishmi, pasi që DCT me ngacmim të pavarur është shkaktuar kur M me n , DFT me ngacmim sekuencial në M me n , dhe presionin e gjakut gjatë operacionit në një karakteristikë natyrore në M me n .
Në AD me një rotori ketri-kafaz, një rritje M n Është siguruar një dizajn i posaçëm i mbështjelljes së rotorit. Brazda për dredha-rimin e rotorit bëhet thellë, dhe vetë dredha-dredha është rregulluar në dy shtresa. Kur fillon motori, frekuenca E 2 dhe rryma helikë janë të mëdha që të çon në efektin e zhvendosjes aktuale - rrjedh aktuale vetëm në shtresën e sipërme me mbeshtjelljen. Prandaj, rezistenca e mbështjelljes dhe çift rrotullues i motorit M P . Madhësia e saj mund të arrijë 1.5M n .
Në AD me një rotor fazor, një rritje M P sigurohet duke ndryshuar karakteristikat e saj mekanike. Nëse rezistenca R P , e përfshirë në rrjedhën aktuale të rrjedhës së rotorit, është zero - motor vepron në një karakteristikë natyrore dhe M P = M H . në R P >0 rezistenca totale aktive e fazës së rotorit është rritur R 2 1 . Rrëshqitje kritike S në në rritje R 2 1 gjithashtu rritet. Si pasojë, në AD me një rotor fazë, futja R P në rrjedhën aktuale të rrjedhës së rotorit çon në zhvendosje M K në drejtim të rrëshqitjeve të mëdha. në S K = 1 M P = M K . Karakteristikat mekanike të AD me një rotor faza në R P >0 janë quajtur artificiale ose reostatike. Ato janë treguar në Fig. 2.16.
Fig. 2.16. Karakteristikat mekanike të AD me një rotor fazor.
Një motor induksion me një rotor kafaze do të fillojë M n \u003e M me dhe do të punojë në pikën A (shih Figurën 2.15). Pas kësaj, momenti i rezistencës M me mund të rritet M K . AD, si dhe motorët DC, me rritje M me automatikisht, pa ndërhyrje të jashtme, do të zvogëlojë shpejtësinë ? dhe të rrisë çift rrotullues M për aq kohë sa M dhe M me Mos i barabartë në madhësi, dmth. nga regjimi i qëndrueshëm me një shpejtësi më të lartë për të lëvizur në mënyrë të qëndrueshme me një shpejtësi më të ulët. Kur ulet M me do të vërehet e kundërta - motori nga gjendja e qëndrueshme në një shpejtësi më të ulët do të kalojë automatikisht në një mënyrë të qëndrueshme me një shpejtësi më të lartë. Seksioni i punës i karakteristikës mekanike të një presioni të gjakut është analog me karakteristikat mekanike të një DCT me ngacmim të pavarur - një vijë e drejtë e prirur drejt boshtit të abscisës.
Vetitë e tilla të presionit të gjakut janë për shkak të emf. E 2 , e cila nxitet nga fusha magnetike rrotulluese e statorit në gjilpërë të rotorit. në M me \u003e M moment dinamik M d dhe shpejtësia e rotorit ? zvogëlohet. Fusha magnetike e statorit rrotullohet me një shpejtësi konstante ? 0 (shpejtësia sinkrone) do të kalojnë gjarpërimin e rotorit me një frekuencë të lartë. Prandaj, E 2 , rryma në mbështjellësin e rotorit, forca e Amperit që vepron në kthesat e saj, dhe kështu çift rrotullues M.
Aftësia e mbingarkesës e AD për momentin përcaktohet nga raporti i momentit kritik M K deri në kohën e nominale M H . Për AD-të konvencionale me një rotor me kafaz M K / M H =1,7 , me një rotor fazor M K / M H =1,8 . Për presione të posaçme të vinçeve me një rotori të kafazit të llojit MTK dhe një rotor fazor të tipit MTKF, raporti M K / M H = 2.3 h3.4.