Antipyretiká pre deti sú predpísané pediatrom. Existujú však situácie núdzovej starostlivosti o horúčku, keď dieťa potrebuje ihneď podať liek. Potom rodičia prevzali zodpovednosť a aplikovali antipyretické lieky. Čo môže dať deťom? Ako môžete znížiť teplotu u starších detí? Ktoré lieky sú najbezpečnejšie?
Pri konštrukcii elektrického pohonu musí byť motor zvolený tak, aby jeho mechanické vlastnosti zodpovedali mechanickým vlastnostiam výrobného mechanizmu. Mechanické vlastnosti dávajú vzťah medzi premennými v ustálených režimoch.
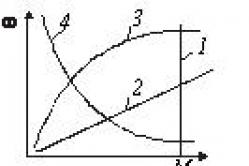
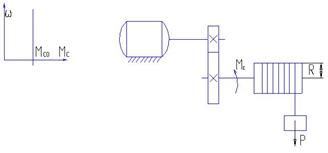
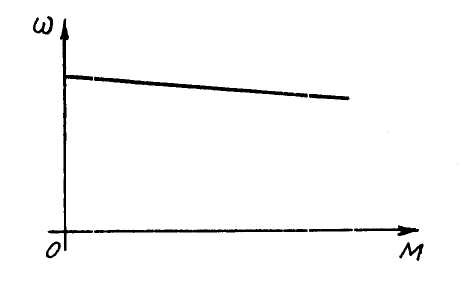
Mechanická charakteristika mechanizmu nazývaný vzťah medzi uhlovou rýchlosťou a momentom odporu mechanizmu, redukovaný na hriadeľ motora) ω = f (Mc).
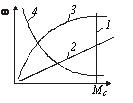
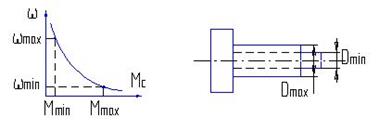
Obr. 1. Mechanické vlastnosti mechanizmov
Medzi odrodou patria niekoľko charakteristických typov mechanických charakteristík mechanizmov:
1. Charakteristika s momentom odporu, ktorý nie je závislý od rýchlosti (priamka 1 na obrázku 1). Mechanická charakteristika nezávislá od rýchlosti je graficky znázornená priamkou rovnobežnou s osou otáčania, v tomto prípade vertikálne. Medzi takéto vlastnosti patria napríklad zdvíhacie žeriavy, navijaky, piestové čerpadlá s konštantnou výhybkou atď.
2. Charakteristika s momentom odporu lineárne v závislosti od rýchlosti (priamka 2 na obrázku 1). Táto závislosť je vlastná napríklad pohonu generátora jednosmerného prúdu s nezávislým budením, ktorý pracuje na konštantnom zaťažení.
3. Charakteristika s nelineárnym nárastom momentu (krivka 3 na obr. Typickými príkladmi sú charakteristiky ventilátorov, odstredivé čerpadlá, vrtule. Pri týchto mechanizmoch moment Mc závisí od štvorca uhlovej rýchlostiω
, Táto takzvaná. parabolické (ventilátor) mechanické charakteristiky.
4. Charakteristika s nelineárne klesajúcim momentom odporu (krivka 4 na obrázku 1). Moment odporu je nepriamo úmerný rýchlosti otáčania. Výkon v tomto prípade zostáva konštantný v celom rozsahu prevádzkovej rýchlosti mechanizmu. Napríklad, hlavné pohybové mechanizmy niektorých obrábacích strojov (sústruhy, frézky, vyvrtávacie) moment Ms sa mení nepriamo ω, a spotreba energie mechanizmu zostáva konštantná.
Mechanické vlastnosti elektrického motora Je volaný jeho uhlovú rýchlosť závislosť momentu ω d = f (M) .Tu by byť zrejmé, že krútiaci moment M z hriadeľa motora a to bez ohľadu na smer otáčania, je pozitívny, - hnací moment. Zároveň má moment odporu Mc negatívny znak.
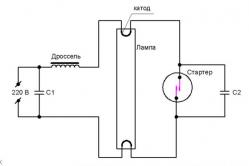
Ako príklady na obr. 2 znázorňuje mechanické charakteristiky: 1 - synchrónny motor; 2 - nezávislý motor jednosmerného prúdu; 3 - jednosmerný motor sériového budenia.
![]()
Obr. 2. Mechanické vlastnosti elektrických motorov
Na hodnotenie vlastností mechanických vlastností elektrického pohonu sa používa koncept tuhosti charakteristiky. Tuhosť mechanickej charakteristiky je určená vyjadrením
β = dM / dω
kde d M - zmeniť krútiaci moment motora; d ω d je zodpovedajúca zmena uhlovej rýchlosti.
Pri lineárnych charakteristikách hodnota β zostáva konštantná, pre nelineárne charakteristiky záleží na pracovnom bode.
Pomocou tohto konceptu sú charakteristiky znázornené na obr. 2, možno kvalitatívne vyhodnotiť nasledovne: 1 - absolútne tuhý (β = ∞); 2 - tuhé; 3 - mäkké.
Absolútne tuhá charakteristika - otáčky motora zostávajú nezmenené, keď sa zaťaženie motora mení od nuly do menovitého. Synchrónne motory majú túto vlastnosť.
Pevná charakteristika - rýchlosť otáčania sa mierne mení, keď sa zaťaženie mení z nuly na nominálnu. Táto charakteristika má motor s jednosmerným prúdom s paralelným budením, ako aj indukčný motor v oblasti lineárnej časti charakteristiky.
Mäkká charakteristika - rýchlosť otáčania motora sa výrazne mení pri pomerne malých zmenách zaťaženia. Takáto charakteristika sa vyznačuje jednosmerným motorom so sériovým, zmiešaným alebo paralelným budením, ale s dodatočným odporom v okruhu kotvy a tiež asynchrónne s odporom v obvode rotora.
Pri väčšine výrobných mechanizmov sa používajú asynchrónne motory s rotorom vo veveričke, ktoré majú pevnú mechanickú charakteristiku.
Všetky mechanické vlastnosti elektrických motorov sú rozdelené na prírodné a umelé.
Prirodzená mechanická charakteristika sa vzťahuje na prevádzkové podmienky motora s menovitými hodnotami parametrov.
Napríklad pre motor s paralelným budením je možné vytvoriť prirodzenú charakteristiku pre prípad, keď napätie na armatúre a budiaci prúd majú nominálne hodnoty a v obvode armatúry nie je žiadny dodatočný odpor.
Prirodzená charakteristika asynchrónneho motora zodpovedá menovitému napätiu a menovitej frekvencii striedavého prúdu dodávaného do statora motora za predpokladu, že v obvode rotora nie je žiadny dodatočný odpor.
Takže pre každý motor môže byť prirodzená charakteristika postavená iba jedna a umelá - neobmedzený počet. Napríklad každá nová hodnota odporu kotvy jednosmerného motora alebo v rotorovom reťazci asynchrónneho motora má svoju vlastnú mechanickú charakteristiku.
Statická mechanická charakteristika motora nazývaná závislosť otáčok od krútiaceho momentu motora. w = | (M). Takmer všetky motory majú vlastnosť, že ich rýchlosť je klesajúcou funkciou krútiaceho momentu motora. Toto platí pre všetky konvenčné elektromotory používané v priemysle, to znamená pre jednosmerné motory nezávislé, sekvenčné a zmiešané budenie, ako aj pre asynchrónne bezkartáčové a kolektorové striedavé motory. Avšak stupeň zmeny rýchlosti s kolísaním krútiaceho momentu pre rôzne motory je odlišný a je charakterizovaný tzv tuhosť ich mechanických vlastností.
Pevnosť mechanickej charakteristiky pohonu- je pomer prírastku krútiaceho momentu vyvinutého elektromotorickým zariadením so zmenou rýchlosti na zodpovedajúci rozdiel uhlových rýchlostí elektrického pohonu:
![]()
Typicky v pracovných oblastiach majú mechanické charakteristiky motorov negatívnu rigiditu β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
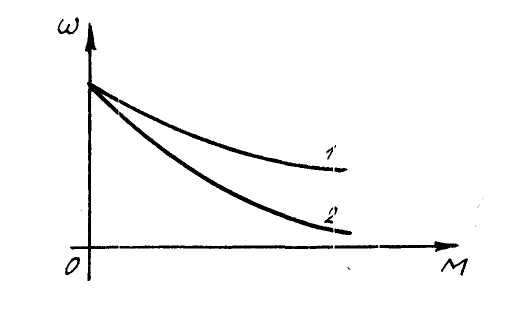
Tuhosť mechanickej charakteristiky v geometrickom zmysle je sklon mechanickej charakteristiky motora.
Ak porovnávate charakteristiky 1 a 2, charakteristika 1 je mäkšia, pretože jeho sklon je menší
DΜ 1\u003e DΜ 2 Þ b 1\u003e b 2, odkedy a.
Mechanické vlastnosti elektromotorov možno rozdeliť do štyroch hlavných kategórií:
1. Absolútne tuhá mechanická charakteristika (β = ∞) je charakteristika, pri ktorej rýchlosť so zmenou momentu zostáva nezmenená. Synchrónne motory majú túto vlastnosť (priamka 1 na obrázku 1).
2. Pevná mechanická charakteristika To je charakteristika, pri ktorej rýchlosť so zmenou krútiaceho momentu, aj keď klesá, ale v malej miere. Pevnú mechanickú charakteristiku tvoria jednosmerné motory nezávislej excitácie, ako aj asynchrónne motory v pracovnej časti mechanickej charakteristiky (krivka 2 na obrázku 1).
Pri indukčnom motore je tuhosť v rôznych bodoch mechanickej charakteristiky odlišná. Medzi maximálnymi (kritickými) hodnotami momentov v motoroch Mk, q a generátoroch Mk, r majú charakteristiky indukčného motora relatívne vysokú tuhosť.
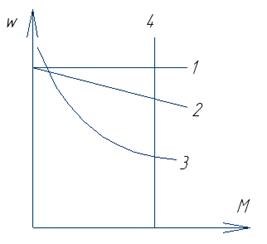 3. Mäkká mechanická charakteristika je charakteristika, pri ktorej sa rýchlosť mení so zmenou momentu. Takéto charakteristiky sú vlastnené jednosmernými motormi série excitácie, najmä v oblasti malých momentov (krivka 3 na obrázku 2). Pre tieto motory tuhost nezostáva konštantná pre všetky body charakteristík.
3. Mäkká mechanická charakteristika je charakteristika, pri ktorej sa rýchlosť mení so zmenou momentu. Takéto charakteristiky sú vlastnené jednosmernými motormi série excitácie, najmä v oblasti malých momentov (krivka 3 na obrázku 2). Pre tieto motory tuhost nezostáva konštantná pre všetky body charakteristík.
Jednosmerné motory so zmiešaným budením môžu byť zaradené do druhej alebo tretej skupiny v závislosti od hodnoty tuhosti mechanickej charakteristiky.
4. Absolútne jemná mechanická charakteristika (β = 0) je charakteristika, pri ktorej uhlová rýchlosť motora zostáva nezmenená. Tieto vlastnosti sú, napríklad, jednosmerné motory s nezávislou budiace sile ich zdroja prúdu alebo pri práci v uzavretých pohonných systémov v prúde kotvy režime stabilizácie (vedenie 4 na obr. 2).
Mechanické vlastnosti pracovného stroja Je závislosť rýchlosti pracovného stroja od momentu odporu, ktorý vytvára w = | (M c).
Mechanické charakteristiky opisujú zaťaženie elektrického pohonu.
Klasifikácia typických zaťažení:
1. Aktívny moment odporu M c = const
Príklad: pohon na zdvíhanie navijaku.
Záťaž je schopná aktivovať samotný mechanizmus, preto sa nazýva aktívny. Pre stavbu musí byť k dispozícii parkovacia brzda.
2. reakčný moment odporu M c = const (zaťaženie typu stálosti momentu)
Typické pre mechanizmy ako "suché trenie".
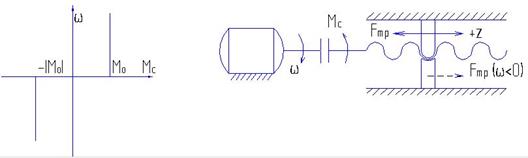
Mc = znamienko M0 (w).
w\u003e 0 Þ M c\u003e 0; w<0 Þ М с <0.
Reakčný moment je reakciou na rýchlosť w.
3. Viskózne trenie
Mc = α BT ω
Moment odporu je úmerný rýchlosti.
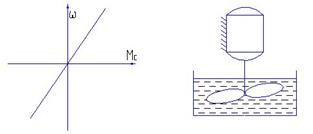
bw je koeficient viskózneho trenia.
4. Vetracie momenty
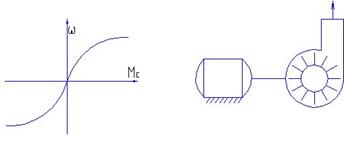
Mc = kw 2 znak (w).
Typické pre odstredivé ventilátory a čerpadlá.
Ak je vstup uzavretý, krútiaci moment záťaže sa zníži.
P = M c w je výkon.
5. Konštantný výkon P = konšt
Kde P c = const.
Často sa používa pre hlavné pohony obrábacích strojov (sústružnícke, frézovacie, vyvrtávacie, brúsne a ostatné stroje).
w max ∙ M min = w min ∙ M max = konšt.
Zvážme to:
w = const, F p = const.

Pre hoblíky:
P 1 = v min ∙ F max - pracovný zdvih, P 1 = v max ∙ F min - voľnobeh.
P 1 »P 2 = konšt.
Vlastnosti výberu motora:
Pri P 1 = 5 kW dostaneme P dv = 5 ∙ 100 = 500 kW.
Motor priamo Voľba limitných hodnôt vedie k nadhodnoteniu motora v inštalovanom výkone D w časov, kde D w - regulácia otáčok rozsahu. V skutočnosti môže byť výkon motora znížený konkrétne výberom rozsahu riadenia rýchlosti.
Pre DFT je HB regulácia otáčok pre budiace prúdy.
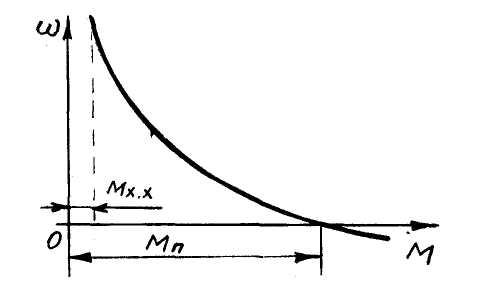
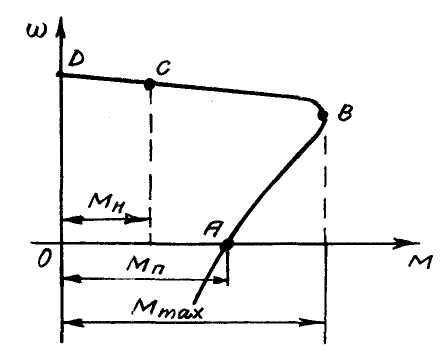
Mechanické charakteristiky motora nazývaná závislosť otáčok rotor od okamihu na hriadeli n = f (M2). Vzhľadom k tomu, v čase voľnobehu zaťažení je malá, M2 ≈ M a mechanická charakteristika je závislá n = f (M). S ohľadom na vzťah s = (n1 - n) / n1, mechanické vlastnosti môžu byť získané tým, že reprezentuje to v grafickej závislosti koordinuje n a M (obrázok 1).
Obr. 1. Mechanické vlastnosti asynchrónneho motora
Prirodzená mechanická charakteristika indukčného motora zodpovedá hlavnému (pasovému) systému jeho zaradenia a menovitým parametrom napájacieho napätia. Umelé vlastnostiak sú zahrnuté ďalšie prvky: rezistory , reaktory , kondenzátory , Ak je motor poháňaný nenaviazaným napätím, vlastnosti sa líšia aj od prírodných mechanických vlastností.
Mechanické vlastnosti sú veľmi pohodlné a užitočné nástroje pre analýzu statických a dynamických režimov elektrického pohonu.
Hlavné body mechanických vlastností: kritický sklz a frekvencia, maximálny krútiaci moment, rozbehový moment, menovitý krútiaci moment.
Mechanickou charakteristikou je závislosť krútiaceho momentu na kĺzaní, alebo inými slovami na počet otáčok:
![]()
Z výrazu  možno vidieť, že táto závislosť je veľmi komplikovaná, pretože, ako ukazujú vzorce)
možno vidieť, že táto závislosť je veľmi komplikovaná, pretože, ako ukazujú vzorce)  a
a  , skĺznutie tiež vstupuje do výrazov pre ja 2
a cos? 2, Mechanická charakteristika asynchrónneho motora sa zvyčajne uvádza graficky
, skĺznutie tiež vstupuje do výrazov pre ja 2
a cos? 2, Mechanická charakteristika asynchrónneho motora sa zvyčajne uvádza graficky
Východiskový bod charakteristiky zodpovedá n = 0 a s = 1: toto je prvý okamih spustenia motora. Počiatočný krútiaci moment M n - veľmi dôležitá vlastnosť prevádzkových vlastností motora. Ak M n malé, menšie ako menovitý prevádzkový krútiaci moment, môže byť motor spustený len v nečinnosti alebo s príslušne zníženým mechanickým zaťažením.
Označte M np Reakčný (brzdný) moment spôsobený mechanickým zaťažením na hriadeli, na ktorom motor beží. Jasnou podmienkou pre možnosť štartovania motora je: M n > M np , Ak je splnená táto podmienka, rotor motora sa bude pohybovať, počet jeho otáčok n bude sa zvyšovať a posúvať s znížiť. Ako je zrejmé z vyššie uvedeného obrázku, krútiaci moment motora sa zvyšuje M n na maximum M m , čo zodpovedá kritickému sklzu s kp, teda prebytok dostupného výkonu motora, určený rozdielom v momentoch M a M np .
Čím väčší je rozdiel medzi dostupným krútiacim momentom motora (možné s daným sklzom prevádzkovej charakteristiky) M a protichodné M np , tým ľahšie je štartovací režim a čím rýchlejšie dosiahne motor stálú rýchlosť otáčania.
Ako ukazuje mechanická charakteristika, pri určitom počte otáčok (pri s = s kp) dostupný krútiaci moment motora dosiahne maximum pre daný motor (pri danom napätí U ) Mt , Motor ďalej zvyšuje rýchlosť otáčania, ale dostupný krútiaci moment sa rýchlo znižuje. Pri niektorých hodnotách n a s krútiaci moment motora sa rovná krútiacemu momentu: štartovanie motora je ukončené, jeho rýchlosť je nastavená na hodnotu zodpovedajúcu pomeru:
![]()
Tento pomer je povinný pre všetky podmienky zaťaženia motora, to znamená pre všetky hodnoty M np , ktoré nepresahujú maximálny krútiaci moment motora Mt , V rámci týchto limitov sa motor automaticky prispôsobí všetkým výkyvom zaťaženia: ak počas prevádzky motora jeho mechanické zaťaženie narastá M np bude viac ako moment vyvinutý motorom. Otáčky motora sa začnú znižovať a čas sa zvýši.
Rýchlosť otáčania sa stanovuje na novej úrovni zodpovedajúcej rovnosti M a M np , Pri znížení zaťaženia sa proces prechodu na nový režim zaťaženia zvráti.
Ak moment záťaže M np prekročí Mt , motor okamžite zastaví, rovnako ako pri ďalšom znížení otáčok motora, krútiaci moment motora klesá.
Preto je maximálny krútiaci moment motora M T sa tiež nazýva prevrátenie alebo kritický moment.
Ak v momente formulácie ![]() náhrada:
náhrada:
potom dostaneme:
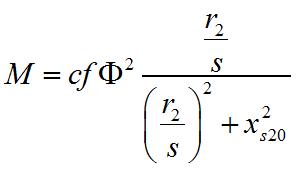
Užívanie prvej derivácie M a rovníme sa na nulu, zistíme, že maximálna hodnota krútiaceho momentu nastáva, keď:
to znamená, že s takýmto posúvaním s = s kp , pri ktorom sa aktívny odpor rotora rovná indukčnej rezistencii
![]()
zmysel s kp väčšina asynchrónnych motorov leží v rozmedzí 10 - 25%.
Ak vo vyššie uvedenom vzorec momentu namiesto aktívneho odporu r 2 nahraďte induktívny vzorec
![]()
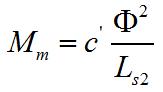
Maximálny krútiaci moment asynchrónny motor je úmerná štvorcu magnetického toku (a teda štvorca napätia) a je nepriamo úmerná indukčnosti rozptylu vinutia rotora.
Keď je napätie aplikované na motor konštantné, jeho tok F zostáva takmer nezmenená.
Indukčnosť rozptylu rotorového reťazca je prakticky konštantná. Preto keď sa aktívny odpor v obvode rotora zmení, maximálna hodnota krútiaceho momentu Mt Nezmení sa, ale príde na rôzne úseky (s nárastom aktívneho odporu rotora - pri veľkých hodnotách sklzu).
Je zrejmé, že maximálne možné zaťaženie motora je určené jeho hodnotou Mt , Pracovná časť výkonu motora leží v úzkom rozsahu od rýchlosti n, zodpovedajúce Mt , do. na n = n 1 (koncový bod charakteristiky) M = 0, pretože pri synchronizovanej rýchlosti rotora s = 0 a I 2 = 0.
Menovitý krútiaci moment určujúci hodnotu menovitého výkonu motora sa zvyčajne odhaduje na 0,4-0,6 Mt , Asynchrónne motory teda umožňujú krátkodobé preťaženie 2 až 2,5 krát.
Hlavným parametrom, ktorý charakterizuje prevádzku indukčného motora je posuvná s - relatívny rozdiel medzi rýchlosťou rotora n a polia n: s = (n o - n) / nO.
Plocha mechanickej charakteristiky zodpovedajúca 0 ≤ s ≤ 1 je oblasť motorických režimov, pričom s< s кр работа двигателя устойчива, при s > s cr je nestabilná. Pre s< 0 и s > 1 krútiaci moment motora smeruje proti smeru otáčania jeho rotora (resp. Regeneratívne brzdenie a brzdenie opačným smerom).
Je často opísaná stabilná časť mechanickej charakteristiky motora vzorec Kloss , nahradením parametrov menovitého režimu do parametra, možno určiť kritický sklz s cr:
 ,
,
kde: λ = M kp / M n - preťažiteľnosť motora.
Mechanické charakteristiky podľa katalógových alebo katalógových údajov môžu byť približne postavené na štyroch miestach (obrázok 7.1):
Bod 1 ideálny voľnobeh, n = n o = 60 f / p, M = 0, kde: p - počet dvojíc pólov magnetického poľa motora;
Bod 2 - menovitý, režim: n = nn, kde M je n = 9550 P n / n n, kde P n - menovitý výkon motora v kW;
Bod 3 - kritický režim: n = n cr, M = M cr = λ M n;
Bod 4 - štartovací režim: n = 0, M = M štart = β M N.
Pri analýze rozsah prevádzkové zaťaženie motora na Mn a trochu stabilnejšie časť mechanické vlastnosti môžu byť približne opísaná rovnicou priamky n = 0 n - v M, kde koeficient "a" je ľahko stanoviteľná dosadením do rovnice parametre Menovité otáčky n n a m n.
Návrh vinutia statora. Jednovrstvové a dvojvrstvové vinutie.
Podľa konštrukcie zvitkov sú vinutia rozdelené na mäkké cievky s cievkami a cievkami s tuhými zvitkami alebo cievkami. Mäkké cievky sú vyrobené z guľatého izolovaného drôtu. Na získanie požadovaného tvaru sú predbežne navinuté na šablóny a potom uložené v izolovaných lichobežníkových drážkach (pozri obrázok 3.4, v, ga 3,5, v); V priebehu procesu navíjania sa inštalujú medzifázové izolačné podložky. Potom sa výstužný cievky do drážok prostredníctvom klinov alebo krytov, dať im finálny tvar (vytvorený čelná časť) sa vykonáva pruhovanie vinutia a jeho impregnácia. Celý proces výroby vinutia typu V môže byť úplne mechanizovaný.
Tuhé cievky (polovodiče) sú vyrobené z obdĺžnikového izolovaného drôtu. Konečná forma sa im dáva pred injektážou; súčasne sú umiestnené na telese a fázovo-fázovej izolácii. Potom sú cievky uložené v predizolovaných otvorených alebo polopriehľadných drážkach , posilniť a impregnovať.
1. Jednovrstvové vinutia - najvhodnejšie pre mechanizované pokladanie, pretože v tomto prípade musí byť vinutie sústredné a súčasne do statorových drážok s oboma stranami cievky súčasne. Avšak ich použitie vedie k zvýšenej spotrebe drôtu na navíjanie kvôli značnej dĺžke čelných častí. Ďalej, v týchto vinutia, nie je možné vykonať skrátenie krokov, čo vedie k zhoršeniu ostrosti tvare magnety vo vzduchovej medzere, ďalšie zvýšenie straty, výskyt porúch mechanických vlastností a zvýšenie šumu. Avšak vzhľadom na ich jednoduchosť a lacnosť sú takéto vinutia bežne používané v asynchrónnych motoroch s malou kapacitou do 10-15 kW.
2. Dual Layer navíjanie- môže vykonávať skrátenie rozstupy vinutia pre ľubovoľný počet divízií zuba, čím sa zlepšuje tvar magnetického poľa vytváraného cievkou a potláča vyššie harmonické v emf krivky. Navyše, pri dvojvrstvových vinutiach sa získa jednoduchšia forma čelných spojení, čo zjednodušuje výrobu vinutí. Takéto vinutia sa používajú pre motory s výkonom nad 100 kW s tuhými cievkami, ktoré sú položené manuálne.
Statorové vinutia. Jednovrstvové a dvojvrstvové vlnové vinutie
V drážkach statorového jadra je viacfázové vinutie, ktoré je pripojené k sieti striedavého prúdu. Viacfázové symetrické vinutia s viacerými fázami tpatrí medzi ne tktoré sa spájajú s hviezdou alebo mnohouholníkom. Napríklad v prípade trojfázového vinutia statora počet fáz m =3 a vinutia môžu byť pripojené na hviezdu alebo trojuholník. Vinutia medzi fázami sú posunuté o uhol 360 / t krúpy; pre trojfázové vinutie je tento uhol 120 °.
Fázové vinutia sú vyrobené zo samostatných cievok zapojených do série, paralelne alebo sériovo paralelných. V tomto prípade sa cievkasa vzťahuje k niekoľkým do série zapojených cievok statorového vinutia uložené v rovnakých drážkach a majúce spoločný izolácie vzhľadom k drážkových stien. Na druhej strane revolúciadvaja z nich sú považované za aktívne (m. J. Usporiadané statorové jadro) vodiče, ukladá do dvoch otvorov na protiľahlých pólov susedných a vzájomne spojené do série. Vodiče umiestnené mimo statorového jadra a spojujúce aktívne vodiče navzájom sa nazývajú čelné časti navíjania. Rovné časti vinutia cievky uvedené v drážkach, strany sa nazývajú cievok a drážkovaná časť.
Statorové drážky, v ktorých sú navíjania uložené na takzvané zuby na vnútornej strane statora. Vzdialenosť medzi stredmi dvoch priľahlých zubov statorového jadra, meraná pozdĺž jeho plochy obrátenej k vzduchovej medzere, sa nazýva zubná deleniealebo rozdelenie drážky.
Viacvrstvové valcové špirálové vinutie (obrázok 3) vinuté z kruhového drôtu a zložené z viacvrstvových kotúčových cievok pozdĺž tyče. Medzi cievkami (cez každú cievku alebo cez dve alebo tri cievky) môžu byť nechané radiálne kanály na chladenie. Takéto vinutia sa používajú na strane vysokého napätia, keď S ≤ 335 kV × A, ja ≤ 45 A a U ltr ≤ 35 kV.
Jednovrstvová a dvojvrstvová valcové cievky (obrázok 4) navinuté z jedného alebo viacerých (až štyri) paralelných obdĺžnikových vodičov a používajú sa pre S ≤ 200 kV × A, ja ≤ 800 A a U ltr ≤ 6 kV.
Téma lekcie 10
Mechanické vlastnosti elektrických motorov
PEDAGOGICKÝ PLÁN
1. Prírodné a umelémechanické vlastnostielektromotory
- tuhosť mechanické vlastnosti
- Prirodzená mechanická charakteristika motora s jednosmerným prúdom paralelného budenia
- Prirodzená mechanická charakteristika
- prírodné
- Mechanické vlastnosti synchrónneho motora. Rozsah synchrónnych motorov na lodiach
Mechanické vlastnosti motora, bez ohľadu na druh prúdu, sa nazýva uhlová závislosť rýchlosti w hriadeľ motora (ďalej len ?? motor) elektromagnetického točivého momentu motora, teda závislosť ω ().
Nasleduje Dôležitá poznámka: v súlade s rovnicou bodmi = ustálenom režime, elektromagnetického točivého momentu motora čelné statický moment (moment ohm odpor) mechanizmus. To znamená, že veľkosť elektromagnetického momentu motora je úplne závislá od momentu mechanizmu?? Čím viac je brzdný moment mechanizmu, tým väčší je krútiaci moment motora a naopak.
To znamená, pre každý motor je vstupná hodnota momentom mechanizmu a výstupom?? jeho rýchlosťou.
Rýchlosť takmer všetkých elektromotorov je klesajúca funkcia krútiaceho momentu motora, to znamená, že so zvyšujúcim sa krútiacim momentom klesá rýchlosť [chlad 33]. Rýchlosť zmeny rýchlosti pre rôzne elektromotory je však odlišná je charakterizovaný parametrom tuhosť mechanických vlastností.
tuhosť mechanické vlastnosti elektrického pohonu β tento pomer rozdielu elektromagnetických momentov motora pri rôznych otáčkach k zodpovedajúcemu rozdielu v uhlových rýchlostiach elektrického pohonu.
β = (M2\u003e M1) / (ω2\u003e ω1) = Δ / Δω
Obvykle v pracovných priestoroch majú mechanické vlastnosti elektrických motorov negatívnu tuhosť β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
rozlíšiť prírodné a umelémechanické vlastnostia elektromotory.
Prirodzená mechanická charakteristika? to je závislosť ω (), ktorá sa odohrá pri normálnom prevádzkových podmienok motora, t.j. pri menovitých parametroch siete a absenciu ďalších rezistorovv reťazcoch vinutí motorov.
Parametre sieťového napájania sú: pri konštantnom prúde? napätie so striedavým prúdom? napätia a frekvencie prúdu.
Charakteristiky prijaté za podmienok, iné ako bežné, nazývané umelé.
Umelé vlastnosti môžu byť získané úpravou parametrov motora, napríklad zavedením rezistor do jednosmerného motora kotvy vinutia okruhu alebo v rotora indukčného motora vinutia obvod, alebo zmeniť parametre siete, tj. napätia a frekvencie striedavého prúdu.
Každý elektromotor má jeden prírodný a súbor umelých charakteristiky. Počet umelých charakteristík závisí od počtu fáz nastavovacieho prvku, napríklad nastavenie počtu stupňov v RHEOSTAT obvodových vinutia jednosmerného motora armatúry. Ak je motor takýchto stupňov? päť, potom tento motor má šesť charakteristík? päť umelých a jeden prírodný.
Umelé mechanické charakteristiky sa používajú na získanie takých prevádzkových režimov motora, ako je regulácia otáčok, spätný chod, elektrické brzdenie atď.
Zvážte prirodzenés mechanické vlastnosti motorovrôznych typov.
Obr. 10.1 Prirodzené mechanické (a) a uhlové (b) charakteristiky synchrónneho motora; θ uhol spomalenia osi rotora z osi magnetického poľa vinutia statora
Prirodzená mechanická charakteristika synchrónneho motora
Prírodné mechanickévlastnosť synchrónny motor(Obrázok 10.1a)? absolútne tuhý?? to je v ktorejrýchlosť so zmenou momentu sa nemení, jeho tuhosť (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C tabilnost rotor synchrónneho motora uhlová rýchlosť vysvetľuje charakteristiky synchrónneho motora t Vstup () nasledovne (obr. 10.1 b), v prípade, že mechanické zaťaženie nie je aplikovaný na rotor, os rotora a rotujúce magnetické pole vinutia statora sú rovnaké, tj., θ = 0 ° (bod 0 na obrázku 10.1 b). Ak je elektromagnetický moment motora M = 0, motor beží pri voľnobehu.
Ak sa aplikuje na hriadeli motora mechanického zaťaženia a zvyšuje to, bude rotor v dôsledku pôsobenia mechanického napätia, aby magnetické pole vinutia statora všetky väčší uhol t Vstup na.
Čím väčšie je mechanické zaťaženie hriadeľa, tým väčší je tento uhol a tým väčší rotačný elektromagnetický moment motora.
toto súčasné zvýšenie krútiaceho momentu engine, spôsobené zvýšením brzdného momentu mechanizmu proste poskytuje stabilitu otáčok motora (na obrázku 10.1 a charakteristická časť je od = 0 do =).
Avšak stálosť otáčok motora sa udržuje tak dlho, ako je uhol θ ≤ 90 °. Pri θ = 90 ° motor vyvíja kritický (maximálny) moment (bod A na obrázku 10.1 a).
Ak θ = 90 ° opäť k zvýšeniu mechanické zaťaženie (θ\u003e 90 °), je elektromagnetický krútiaci moment motora zníži (časť AB uhlové charakteristiky), tj. tento moment bude menší ako brzdný moment mechanizmu. V dôsledku toho sa rýchlosť rotora motora zníži a nakoniec sa rotor zastaví.
Pretože rýchlosť rotora je menšia ako rýchlosť otáčavého magnetického poľa statorového vinutia, hovorí sa, že motor vypadá zo synchronicity.
Ako vyplýva z uhlovej charakteristiky motora, podmienka straty motora zo synchronizácie je: θ≤90 °.
V praxi je nominálny uhol θ = 20 ... 40 °.
Rozsah synchrónnych motorov: na lodiach? ako veslovanie elektrických motorov, rotačné skrutky; na brehu? na pohon silných mechanizmov, napríklad kompresorov na čerpacích staniciach.
Prirodzená mechanická charakteristika jednosmerného motora
prírodné mechanické charakteristiky jednosmerného motoraparalelné budenie (obrázok 8.5)?w e stkaya, pretože jeho tuhosť
β = Δ / Δω ≤ 10%.
Obr. 10.2 Prírodné mechanická charakteristika paralelného jednosmerného motora
To znamená, že keď sa elektromagnetický moment motora mení v širokom rozmedzí, jeho rýchlosť je pomerne stabilná (to znamená, že sa mení nepatrne).
Takéto motory sa používajú tam, kde sa zaťaženie mechanizmu mení v širokom rozmedzí, rýchlosť motora by sa nemala výrazne meniť? v elektrických pohonoch čerpadiel, ventilátorov atď.
Obr. 10.3 Prírodné mechanické vlastnostijednosmerný jednosmerný motor
prírodné mechanická charakteristika jednosmerného motora so sériovým budením (obr. 10,3); mäkký , pretože jeho tuhosť
β = Δ / Δω\u003e 10%.
To znamená, že keď sa mení elektromagnetický moment motora, aj v malom rozsahu, jeho rýchlosť sa výrazne mení.
Spomeňme si na dve charakteristické vlastnosti tohto motora jednosmerný jednosmerný motor:
- Pri znížení mechanického zaťaženia hriadeľa alebo jeho neprítomnosti (=)
rýchlosť motora prudko stúpa, motor "predáva". Preto tento motor nemôže byť ponechaný na hriadeli;
- Pri štartovaní motor vyvíja začiatočné momenty viac než iné typy motorov.
Tieto motory sa nevzťahujú na súdy, ale sú používané na pláži, napríklad v elektrickú dopravu, najmä na vozíku, pokiaľ nie sú ponechaní bez záťaže na hriadeli a ktoré potrebujú vysoký štartovací moment (pri ťahaní vozíka s priestorom).
Obr. 10.4 Prírodné mechanické charakteristiky jednosmerných motorov so zmiešaným budením: 1 s paralelné sekvenčné budenie;
2-s postupne paralelné budenie
prírodné mechanická charakteristika motora so zmiešaným budením je stredná medzi charakteristikami paralelných a sekvenčných motorov, magnetický tok excitácie je vytvorený spoločným pôsobením oboch vinutí? paralelné a sériové.
Existujú dva typy zmiešaných excitačných motorov:
- s paralelným? sekvenčná excitácia, pri ktorej je hlavná časť výsledného magnetického toku vytvorená paralelným vinutím (až do 70%, zostávajúcich 30% sekvencie);
2. postupne paralelné budenie, v ktorom je hlavná časť výsledného magnetického toku generovaná sériovým vinutím (až do 70%, zvyšných 30%?? paralelné).
Preto graf mechanických charakteristík motora prvého typu je tuhší ako graf druhého motora.
Obidve mechanické vlastnosti?? mäkký , pretože ich tuhosť
β = Δ / Δω\u003e 10%.
Na lodiach sa používajú zmiešané excitačné motory v regulovaných elektrických pohonoch? navijaky, kohútiky, vrátky a veže.
Prirodzená mechanická charakteristika indukčného motora
prírodné mechanická charakteristika indukčného motora má dve časti; nepracujúci (posilňovač) AB a pracovné lietadláD (obrázok 8.8).
Obr. 10.5 Prírodné mechanická charakteristika indukčného motora
Pri štartovaní motor rozvíja krútiaci moment(Segment OA), a potom sa zrýchľuje na ceste ABC do bodu C. Preto je oblasť AB súčasne zvyšuje rýchlosť a krútiaci moment v bode, v motore vytvára maximálny krútiaci moment, Na lietadlovej časti sa rýchlosť stále zvyšuje a moment klesá na nominálnu hodnotu (bod C). Na stránkeBC motor je preťažený, t. kdekoľvek v tejto sekcii elektromagnetický krútiaci moment motora je väčší ako menovitý krútiaci moment (> >).
Za normálnych podmienok beží motor v sekcii CD , ktorej tuhosť
β = Δ / Δω < 10%.
To znamená, že keď sa krútiaci moment mení v širokom rozsahu, otáčky motora sa zanedbateľne menia.
Asynchrónne motory našli najrozsiahlejšiu aplikáciu na lodiach so striedavým elektrárňam.
Priemysel vyrába špeciálne pre lode asynchrónne motory rôznych radov, napríklad 4A ... OM2 (štvrtá séria asynchrónnych motorov), MAP (morské asynchrónne polyusopereklyuchaemy), MTF (c vinutím rotora) a ďalšie.
Tak motory radu 4A? jednorýchlostné, séria MAP? dvoj- a trojrýchlostné série MTF? počet rýchlostí je určený riadiacim obvodom (až 5 rýchlostí).
Prednáška 7.
2.5. Mechanické charakteristiky jednosmerného motora so sériovým budením. Režim motora
Schéma zapnutia motora je znázornená na obr. 2.8. Kotvica motora M a LM budiace vinutie sú zapojené do série a dodávané z jedného zdroja U. Preto je prúd armatúry ja ja je tiež budiaci prúd ja v , Táto okolnosť určuje jediný rozdiel v konštrukcii motora s postupnou excitáciu motora s cudzím budením: budiacim vinutím LM DPT sa séria budiace vodič z rovnakého prierezu, aký má vinutie kotvy.
Obr. 2.8. Schéma zahrnutia DCT s následným budením.
S rotujúcou kotvou vo svojom navíjaní sa vyvolá emf. otáčania ^ E, Na schéme zapnutia smeru motora E proti smeru U, čo zodpovedá prevádzkovému režimu motora. hodnota E sa rovná:
kde ?
- uhlovú rýchlosť motora; F - tok motora;  - Konštruktívny koeficient údajov motora pre výpočet, ktorý je uvedený v referenčných knihách. tu r - počet dvojíc motorových pólov; N - počet aktívnych vodičov navíjania armatúry; a - počet dvojíc paralelných vetiev navíjania kotvy.
- Konštruktívny koeficient údajov motora pre výpočet, ktorý je uvedený v referenčných knihách. tu r - počet dvojíc motorových pólov; N - počet aktívnych vodičov navíjania armatúry; a - počet dvojíc paralelných vetiev navíjania kotvy.
Smer kotevného prúdu ja ja , rovnako ako smer E na schéme zapojenia sa zobrazuje prevádzkový režim motora.
Prípustná hodnota kotvového prúdu motora ja dodávam je obmedzená podmienkami spínania a mechanickou pevnosťou armatúry a nesmie prekročiť menovitý prúd ja jang viac ako 2,5 krát ja dodávam ? 2.5 I jang .
V súlade s rovnovážnu rovnicou napätia v ustálenom chodu motora, napätie U, aplikovať na motor obvode kotvy je dané úbytkom napätia na obvode kotvy ja ja R zajac a indukované v navíjaní kotvy emf. otáčania E:
U = I + R + + +
kde R zajac = R ja + R DP + R KO + R V + R P - celková odolnosť kotvového reťazca. tu R ja - odpor vinutia armatúry; R DP - odpor vinutia ďalších pólov; R KO - odpor vyrovnávacieho vinutia; R V - odpor budiaceho vinutia; R P - odolnosť východiskového reostatu.
hodnota ja ja v ustálenom stave bude:
V štartovacom režime ^ E = 0, preto, vzhľadom na malý odpor vinutí, štartovací prúd ja Aj P môže prekročiť prípustnú hodnotu. Na obmedzenie počiatočného prúdu sa používa počiatočný reostat, ktorého odpor R P je vybraný takým spôsobom, že ja Aj P ? ja Som DOP
Z rovnice rovnováhy namáhania pre kotvový reťazec možno získať analytický výraz pre mechanickú charakteristiku motora.
Nahradenie namiesto emf. otáčania ^ E jeho hodnota a riešenie výslednej rovnice vzhľadom na rýchlosť, získame závislosť otáčok motora ? z kotúčového prúdu ja ja A = f (I ja ) , ktorá sa nazýva elektromechanická charakteristika:
Vzhľadom k tomu, že budiace vinutie je zapojené do série s armatúrou motora, vytvára sa magnetickým tokom ^ Φ je funkcia aktuálnej armatúry ja ja , závislosť Φ = f (I ja ) sa nazýva magnetizačná krivka a má nelineárny charakter typu "saturačnej zóny". Presné analytický opis tejto krivky neexistuje, a preto nie je potrebné presné analytické opis mechanických vlastností radu budiace DPT. Ak zanedbáme sýtosť magnetického systému, predpokladáme lineárny vzťah medzi F a ja ja s koeficientom úmernosti ?, ktorý je považovaný za F =? I ja , Krútiaci moment sa rovná:
KFI M = I = k? I I 2
Preto je veľkosť prúdu kotvy sa bude rovnať:
Dosadením do rovnice pre hodnoty elektromechanických charakteristík ja ja , Získame rovnicu mechanických vlastností:
kde A = U / k; B = R zajac / (K?) - konštanty.
Analýza tejto rovnice vyplýva, že os úsek je asymptóta krivke, a že pre malé hodnoty momentov má väčší sklon
na R P =0 a U = U n Motor beží na fyzických vlastnostiach. Konštruovať prirodzené vlastnosti, takzvané univerzálne charakteristiky uvedené v motore pre každú sériu adresárov. Sú v závislosti na n = f (I ja ) a M = f (I ja ) v relatívne. Vedomím menovitých dát motora, je možné postaviť svoju odpoveď v absolútnych hodnotách. Táto charakteristika je znázornená na obr. 2.9.
Obr. 2.9. Mechanické vlastnosti jednosmerného motora série budiaceho prúdu.
Funkcia charakteristika je dramatické zvýšenie rýchlosti so znížením krútiaceho momentu odporu M s , Podľa sériovo rany jednosmerný motor nemôže byť naštartovaný v prípadoch, keď M s n Vzhľadom k tomu, otáčky motora môže prekročiť prípustnú hodnotu ?
dodatočný =2,5 ?
n , K vysvetlenie tejto funkcie možno zvážiť procesy prebiehajúce v poklese zaťaženia motora. Predpokladajme, že motor pracuje v bode A na prirodzené vlastnosti (viď. Obr. 2.9.) V rovnovážnom stave pri rýchlosti ?
1
, Pri znižovaní odporu moment hodnoty M c1 napríklad na hodnotu M s2 , Tam je pozitívny dynamický moment M D >0
a otáčky motora sa začína zvyšovať. Keď cudzím budením dôsledkom toho bude zvýšenie EMF otáčania  a zníženie prúdu kotvy
a zníženie prúdu kotvy  a krútiaci moment
a krútiaci moment  , Zvýšenie rýchlosti a zníženie krútiaceho momentu motora bude pokračovať tak dlho, až kým sa krútiaci moment motora M stať sa rovná M s2 a M D sa stane nulou.
, Zvýšenie rýchlosti a zníženie krútiaceho momentu motora bude pokračovať tak dlho, až kým sa krútiaci moment motora M stať sa rovná M s2 a M D sa stane nulou.
Sekvenčné excitácia emf otáčania E je funkciou dvoch premenných - zvýšenie rýchlosti ? a znížením prietoku F, V dôsledku toho, hodnota EA preto je hodnota ja ja a MS rastúcou rýchlosťou nebude výrazne meniť, čo vedie k uchovaniu M D >0 a ďalšie zvýšenie rýchlosti. Ak je odpor začína odpory R P >0 , Statický pokles otáčok ?? s v rovnakom okamihu, kedy je motor bude väčší, než je prirodzenou vlastnosťou. Preto odporové vlastnosti bude mať veľký sklon k vodorovnej osi.
Sekvenčné excitácie točivého momentu úmerná druhej mocnine tohto prúdu kotvy  a rozbehového prúdu hodnotu ja Som DOP ? 2,5i YANG To vám umožní získať oveľa viac, ako keď cudzím budením hodnoty M ADVANCED = 5 M H , Preťaženie faktor jednosmerného motora s krútiacim momentom série budiaci
a rozbehového prúdu hodnotu ja Som DOP ? 2,5i YANG To vám umožní získať oveľa viac, ako keď cudzím budením hodnoty M ADVANCED = 5 M H , Preťaženie faktor jednosmerného motora s krútiacim momentom série budiaci
K P M = ADVANCED / M H sa rovná piatim. Taký preťaženiu má už jeden elektromotor. Je to práve táto vlastnosť s motormi rady vinutím sú používané v elektrickej doprave a zdvíhadiel.
Prednáška 8.
^ 2.6. Mechanické charakteristiky jednosmerného motora so sériovým budením. Režim elektrického brzdenia.
Dva elektrický režim brzdenia: Dynamické brzdenie a zvrátiť súčasný brzdu. Rekuperačné brzdenie nie je možné vykonať, pretože emf otáčania Enemôže byť väčšia, než je zdroj napätia kotvy U.
^ dynamické brzdenie Existujú dva spôsoby: self-vzrušený a zvlášť nadšený. Vodičské štart motora a mechanických vlastností prvom prípade obr. 2.10.
Obr. 2.10. a) motorových zapnutie režimu okruhu v self-vzrušený dynamické brzdenie;
B) vlastnosti motora v režime self-vzrušený dynamické brzdenie.
Motor je odpojený od zdroja napätia a budiace cievka sa zapne tak, že smer prúdu ja V v tom bol rovnaký ako v režime motora (pozri obrázok 2.8). Táto ochrana je smer prúdu vylučuje deštrukcii malého zvyškového prúdu spojeného s statora magnetizácie. Tento prúd je príčinou samobudené: vo vinutia kotvy, otáčajúce sa v dôsledku pôsobenia zotrvačných síl v rovnakom smere, indukované elektromotorické E, ktorého smer je rovnaký ako v režime motora. V rámci akcie E prúd sa objaví v obvode dynamické brzdenie, čo vedie k zvýšeniu prietoku F, emf E a prúd ja ja , Od prúdu ja ja vo vzťahu k režimu motora má opačný smer, krútiaci moment motora sa stáva inhibičným. Motor od bodu A v prvom kvadrante prebieha do B alebo C na charakteristiku dynamické brzdenie v druhom kvadrante. Spočiatku samobudené proces je veľmi intenzívny, a to vedie k valcovacej brzdného momentu, ktorý je schopný spôsobiť rany do mechanickej časti pohonu. Preto sa častejšie používa dynamické brzdenie s nezávislým budením. Schéma spínania motora a mechanické charakteristiky sú znázornené na obr. 2.11.
Obr. 2.11. a) schéma zapnutia motora v dynamickom režime
Brzdenie so samostatným budením;
B) charakteristiky motora v dynamike
Brzdenie so samostatným budením.
Svorky kotvy motora sú skratované k dynamickému brzdnému odporu R DT , a vinutí poľa je napojené na napätie zdroja cez odpor R V . Prúd v ňom je smerovaný ako v režime motora a je nastavený na menovitý. Vlastnosti podobné tým z DPT so samostatným budením: sú lineárne, sú umiestnené v druhom kvadrante, a prechádzajú pôvodu.
^ Zastavenie spomalenia Čo sa týka DPT s nezávislou excitácie sa robí v prípade, keď sú vinutia motora obsiahnuté v jednom smere otáčania, a kotvou pod vplyvom zotrvačných síl a momentu odporu aktívnej otáča v opačnom smere - zaradenie.
Reverzibilná schéma zapínania DCT s následným budením je znázornená na obr. 2.12.
![]()
Obr. 2.12. Reverzibilná schéma zapínania DCT so sériovým budením.
Účel prvkov je rovnaký ako v obvode na obr. 2.5. Keď je motor reverznej od smeru prúdu kotvy v LM budiace vinutia udržiava. Všetky procesy počas brzdenia sú teda analogické tým, ktoré sa vyskytujú v obvode na obr. 2.5. Vlastnosti motora sú znázornené na obr. 2.13.

Obr. 2.13.a) charakteristiky DPT sa séria excitačné protivokvlyucheniem v režime brzdenia.
B) podobné vlastnosti s aktívnymi M s.
Prednáška 9.
^ 2.7. Mechanické vlastnosti indukčných motorov. Režim motora.
Asynchrónne motory (AD) - najbežnejší typ motora, pretože oni sú viac spoľahlivé a ľahko ovládateľné, za rovnakého výkonu majú menšiu hmotnosť, veľkosť a cenu v porovnaní s DPT. Schémy na zaradenie krvného tlaku sú znázornené na obr. 2.14.
Až do nedávnej doby, BP klietkovým použitý v neregulovaných pohonov. Avšak, s príchodom tyristor frekvenčných meničov (TFC) napájacie napätie BP statorové vinutie nakrátko sa začal používať v riadených pohonov. V súčasnosti sa v frekvenčných meničoch používajú výkonové tranzistory a programovateľné regulátory. riadenie rýchlosti s názvom pulz a jeho zlepšenie je najdôležitejšie trend vo vývoji elektrického pohonu.
Obr. 2.14. a) schéma otáčania AD s rotorom vo veveričke;
B) schému spínania AD s fázovým rotorom.
Rovnica pre mechanických vlastností krvného tlaku je možné získať na základe zodpovedajúcej obvode AD. Pokiaľ tento systém ignoroval aktívny odpor statora, bude výraz pre mechanických vlastností, ktoré sú:
 ,
,
kde  ;
;  .
.
tu M na – kritický moment; S na - príslušný kritický posuv; U f - efektívna hodnota fázového napätia siete; ? 0 = 2 ° F / p - uhlová rýchlosť rotujúceho magnetického poľa AD (synchrónna rýchlosť); f Frekvencia napájacieho napätia; p - počet dvojíc pólov krvného tlaku; x na - odpor proti indukčnej fáze skratu (určený zo substitúcie); S = (? 0 -?)/? 0 - posuv (rýchlosť rotora vzhľadom na rýchlosť rotujúceho poľa); R 2 1 - celkový aktívny odpor fázy rotora.
Mechanická charakteristika AD s rotorom vo veveričke je znázornená na obr. 2.15.
Obr. 2.15. Mechanická charakteristika skratovaného rotora.
Na ňom sú tri charakteristické body. Súradnice prvého bodu ( S = 0; A = 0 ; M = 0). Zodpovedá ideálnemu režimu voľnobehu, keď je rýchlosť rotora rovné rýchlosti rotujúceho magnetického poľa. Súradnice druhého bodu ( S = S na ; M = M na). Motor pracuje s maximálnym krútiacim momentom. na M s \u003e M na rotor motora bude nútený zastaviť, čo je pre motor skratový režim. Preto sa krútiaci moment motora v tomto bode nazýva kritický M na , Súradnice tretieho bodu ( S = 1; A = 0; M = M n). V tomto momente pracuje motor v štartovacom režime: otáčky rotora? = 0 a počiatočný krútiaci moment pôsobí na pevný rotor M n , Časť mechanickej charakteristiky umiestnená medzi prvým a druhým charakteristickým bodom sa nazýva pracovná časť. Na ňom motor beží v ustálenom stave. So skratovaným rotorom, ak sú podmienky U = U n a f = f n mechanická charakteristika sa nazýva prirodzená. V tomto prípade je v pracovnej časti charakteristiky bod zodpovedajúci menovitému pracovnému režimu motora a má súradnice ( S n ; ? n ; M n).
Elektromechanické charakteristiky krvného tlaku A = f (I f ) , ktorý je na obrázku 2.15 znázornený ako prerušovaná čiara, na rozdiel od elektromechanických charakteristík DCT, sa zhoduje s mechanickou charakteristikou len na jeho pracovnom úseku. Je to spôsobené tým, že počas štartu kvôli meniacej sa frekvencii emf. v navíjaní rotora E 2 frekvencia prúdu a pomer indukčnej a aktívnej odolnosti vinutia sa mení: na začiatku štartu je frekvencia prúdu veľká a induktívny odpor je väčší ako aktívny odpor; so zvyšujúcou sa rýchlosťou rotora ? frekvencia rotorového prúdu, a teda aj indukčný odpor jeho vinutia, klesá. Preto je spúšťací prúd AD v režime priameho štartu 5-7-krát väčší ako nominálna hodnota ja lb , a počiatočný krútiaci moment M n sa rovná nominálnemu M n , Na rozdiel od DPT, kde je pri štartovaní potrebné obmedziť štartovací prúd a počiatočný krútiaci moment, pri štarte AD musí byť rozbehový prúd obmedzený a rozbehový krútiaci moment sa zvyšuje. Druhá okolnosť je najdôležitejšia, pretože DCT s nezávislým budením sa spúšťa, keď M s n , DFT s postupným budením na M s n , a krvný tlak počas prevádzky na prirodzenej charakteristike pri M s n .
V AD s rotorom vo veveričke sa zvýšil M n Špeciálna konštrukcia rotorového vinutia je poskytovaná. Drážka pre navíjanie rotora je hlboká a samotné navíjanie je usporiadané v dvoch vrstvách. Keď je motor spustený, frekvencia E 2 a rotorové prúdy sú veľké, čo vedie k vzniku účinku prúdového posunu - prúd prúdi iba v hornej vrstve vinutia. Preto je odpor vinutia a počiatočný krútiaci moment motora M P , Jeho veľkosť môže dosiahnuť 1.5M n .
V AD s fázovaným rotorom je nárast M P sa poskytuje zmenou jeho mechanických vlastností. Ak odpor R P , zahrnutá v prúdovej dráhe prúdu rotora, je nulová - motor pracuje na prirodzenej charakteristike a M P = M H , na R P >0 celkový aktívny odpor rotorovej fázy sa zvyšuje R 2 1 , Kritické kĺzanie S na zvyšujúce sa R 2 1 tiež zvyšuje. V dôsledku toho, v AD s fázovým rotorom, úvod R P v prúdovej dráhe prúdu rotora vedie k posunutiu M K v smere veľkých diapozitívov. na S K = 1 M P = M K . Mechanické vlastnosti AD s fázovým rotorom pri R P >0 sa nazývajú umelé alebo reostatické. Sú znázornené na obr. 2.16.
Obr. 2.16. Mechanické vlastnosti AD s fázovým rotorom.
Indukčný motor s rotorom vo veveričke sa začne na M n \u003e M s a bude pracovať v bode A (pozri obrázok 2.15). Potom je moment odporu M s možno zvýšiť na M K , AD, rovnako ako jednosmerné motory M s bude automaticky, bez vonkajšieho rušenia, znížiť rýchlosť ? a zvýšiť krútiaci moment M ako dlho M a M s Nerobte veľkosťou, t. z ustáleného režimu s vyššou rýchlosťou na prechod na stabilný režim s nižšou rýchlosťou. Pri znižovaní M s bude pozorovaný naopak - motor z ustáleného stavu pri nižšej rýchlosti sa automaticky prepne na stabilný režim pri vyššej rýchlosti. Pracovná časť mechanickej charakteristiky krvného tlaku je analogická mechanickej charakteristike DCT s nezávislým budením - priamka naklonená k osi osi osi.
Takéto vlastnosti krvného tlaku sú spôsobené emf. E 2 , ktorý je indukovaný rotujúcim magnetickým poľom statora vo vinutí rotora. na M s \u003e M dynamický moment M d a rýchlosť rotora ? klesá. Magnetické pole statora sa otáča konštantnou rýchlosťou ? 0 (synchrónna rýchlosť) prekročí navíjanie rotora vysokou frekvenciou. Z tohto dôvodu E 2 , prúd v navíjaní rotora, silu Ampéra, ktorá pôsobí na jeho otáčky, a teda krútiaci moment M.
Schopnosť AD pre preťaženie momentu je určená pomerom kritického momentu M K v čase nominálneho M H , Pre bežné AD s rotorom vo veveričke M K / M H =1,7 , s fázovým rotorom M K / M H =1,8 , Pre špeciálne tlaky v žeriave s rotorom typu MTK a fázovým rotorom typu MTKF, M K / M H = 2,3 h3,4.