Antipyréticos para crianças são prescritos por um pediatra. Mas há situações de cuidados de emergência para a febre, quando a criança precisa administrar o medicamento imediatamente. Em seguida, os pais assumem a responsabilidade e aplicam drogas antipiréticas. O que é permitido dar aos bebês? Como você pode reduzir a temperatura em crianças mais velhas? Quais medicamentos são os mais seguros?
Ao projetar o acionamento elétrico, o motor deve ser selecionado de forma que suas características mecânicas correspondam às características mecânicas do mecanismo de produção. As características mecânicas dão a interação de variáveis em regimes de estado estacionário.
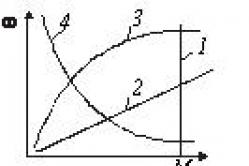
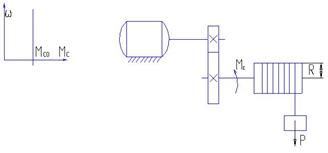
Característica mecânica do mecanismo chamou a relação entre a velocidade angular e o momento de resistência do mecanismo, reduzido ao eixo do motor) ω = f (Mc).
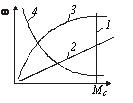
Fig. 1. Características mecânicas dos mecanismos
Entre a variedade estão vários tipos característicos de características mecânicas dos mecanismos:
1. Característica com o momento de resistência, não dependendo da velocidade (linha reta 1 na Figura 1). A característica mecânica independente da velocidade é representada graficamente por uma linha reta paralela ao eixo de rotação, neste caso vertical. Tais características são, por exemplo, guindastes, guinchos, bombas de pistão com uma altura de alimentação constante, etc.
2. Característica com o momento de resistência linearmente dependendo da velocidade (linha reta 2 na Figura 1). Esta dependência é inerente, por exemplo, à unidade de um gerador de corrente direta com excitação independente, que opera com carga constante.
3. Característica com aumento não linear no momento (curva 3 na Fig. Exemplos típicos são as características dos ventiladores, bombas centrífugas, hélices. Para esses mecanismos, o momento Mc depende do quadrado da velocidade angularω
. Isso é o chamado. característica mecânica parabólica (ventilador).
4. Característica com um momento de resistência não linearmente diminutivo (curva 4 na Figura 1). Aqui, o momento de resistência é inversamente proporcional à velocidade de rotação. O poder neste caso permanece constante em toda a faixa de velocidade operacional do mecanismo. Por exemplo, nos mecanismos do movimento principal de algumas máquinas de corte de metal (girar, fresar e chocar), o momento Mc varia inversamente com ω, e a energia consumida pelo mecanismo permanece constante.
Características mecânicas do motor elétrico é a dependência da sua velocidade angular no torque ω d = f (M). Aqui, deve ter em mente que o momento M no eixo do motor, independentemente do sentido de rotação, tem um sinal positivo - o momento do movimento. Ao mesmo tempo, o momento de resistência Mc tem um sinal negativo.
Como exemplos na Fig. 2 mostra as características mecânicas: 1 - motor síncrono; 2 - motor de corrente contínua independente; 3 - um motor DC de excitação série.
![]()
Fig. 2. Características mecânicas dos motores elétricos
Para avaliar as propriedades das características mecânicas da transmissão elétrica, é utilizado o conceito de rigidez da característica. A rigidez da característica mecânica é determinada pela expressão
β = dM / dω
onde d M - alterar o torque do motor; d ω d é a alteração correspondente na velocidade angular.
Para características lineares, o valor de β permanece constante, para os não-lineares, depende do ponto de operação.
Usando esse conceito, as características mostradas na Fig. 2, podem ser qualitativamente avaliados da seguinte forma: 1 - absolutamente rígido (β = ∞); 2 - rígido; 3 - macio.
Característica absolutamente rígida - a velocidade do motor permanece inalterada quando a carga do motor varia de zero a nominal. Os motores síncronos possuem essa característica.
Característica rígida - a velocidade de rotação varia ligeiramente quando a carga muda de zero para nominal. Esta característica possui um motor de corrente contínua com excitação paralela, bem como um motor de indução na região da parte linear da característica.
Característica macia - a velocidade de rotação do motor varia significativamente, com mudanças relativamente pequenas na carga. Tal característica é possuída por um motor de corrente contínua com excitação série, mista ou paralela, mas com uma resistência adicional no circuito da armadura, e também assíncrono com a resistência no circuito do rotor.
Para a maioria dos mecanismos de produção, utilizam-se motores assíncronos de esquilo com características mecânicas rígidas.
Todas as características mecânicas dos motores elétricos são divididas em naturais e artificiais.
Característica mecânica natural refere-se às condições de funcionamento do motor com valores nominais dos parâmetros.
Por exemplo, para um motor com excitação paralela, uma característica natural pode ser construída para o caso em que a tensão na armadura e a corrente de excitação têm valores nominais, e não há resistência adicional no circuito da armadura.
A característica natural de um motor assíncrono corresponde à tensão nominal e à freqüência nominal da corrente alternada fornecida ao estator do motor, com a condição de que não haja resistência adicional no circuito do rotor.
Assim, para cada motor, uma característica natural pode ser construída apenas uma, e artificial - um número ilimitado. Por exemplo, cada novo valor de resistência da armadura do motor DC ou na cadeia do rotor de um motor assíncrono tem sua própria característica mecânica.
A característica mecânica estática do motor chamou a dependência de velocidade no torque do motor. w = | (M). Quase todos os motores têm a propriedade de que sua velocidade é uma função decrescente do torque do motor. Isto aplica-se a todos os motores elétricos convencionais utilizados na indústria, isto é, a motores de corrente contínua de excitação independente, seqüencial e misturada, bem como a motores de corrente alternada assíncronos sem escovas e coletores. No entanto, o grau de mudança de velocidade com a variação do torque para diferentes motores é diferente e é caracterizado pelo chamado rigidez suas características mecânicas.
Rigidez das características mecânicas da unidade- é a relação entre o incremento de torque desenvolvido pelo dispositivo do motor elétrico, com uma mudança de velocidade, para a diferença correspondente nas velocidades angulares do acionamento elétrico:
![]()
Tipicamente, em áreas de trabalho, as características mecânicas dos motores têm uma rigidez negativa de β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
A rigidez de uma característica mecânica no sentido geométrico é a inclinação da característica mecânica do motor.
Se você comparar as características 1 e 2, a característica 1 é mais suave, porque sua inclinação é menor
DМ 1\u003e DМ 2 Þ b 1\u003e b 2, desde e.
As características mecânicas dos motores elétricos podem ser divididas em quatro categorias principais:
1. Característica mecânica absolutamente rígida (β = ∞) é a característica na qual a velocidade com a mudança do momento permanece inalterada. Os motores síncronos possuem esta característica (linha recta 1 na Fig. 1).
2. Característica mecânica rígida Esta é uma característica em que a velocidade com a mudança de torque, embora diminua, mas em pequena medida. Uma característica mecânica rígida é possuída por motores DC de excitação independente, bem como por motores assíncronos dentro da parte de trabalho da característica mecânica (curva 2 na Fig. 1).
Para um motor de indução, a rigidez em diferentes pontos da característica mecânica é diferente. Entre os valores máximos (críticos) dos momentos no motor Mk, q e os modos gerador Mk, r, a característica do motor de indução tem uma rigidez relativamente alta.
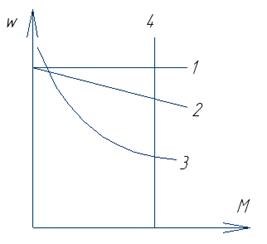 3. Característica mecânica macia é uma característica em que a velocidade muda significativamente com a mudança do momento. Tais características são possuídas por motores de corrente contínua de excitação em série, especialmente na zona de pequenos momentos (curva 3 na Fig. 2). Para estes motores, a rigidez não permanece constante para todos os pontos de características.
3. Característica mecânica macia é uma característica em que a velocidade muda significativamente com a mudança do momento. Tais características são possuídas por motores de corrente contínua de excitação em série, especialmente na zona de pequenos momentos (curva 3 na Fig. 2). Para estes motores, a rigidez não permanece constante para todos os pontos de características.
Os motores DC de excitação mista podem ser atribuídos ao segundo ou terceiro grupo, dependendo do valor da rigidez da característica mecânica.
4. Característica mecânica absolutamente suave (β = 0) é uma característica na qual a velocidade angular do motor permanece inalterada. Tais características são possuídas, por exemplo, por motores de corrente contínua de excitação independente ao alimentá-los a partir de uma fonte de corrente ou ao trabalhar em sistemas fechados de um accionamento elétrico no modo de estabilização da corrente de indução (linha 4 na Figura 2).
Características mecânicas da máquina de trabalho É a dependência da velocidade da máquina de trabalho no momento da resistência, que cria w = | (M c).
As características mecânicas descrevem a carga na unidade elétrica.
Classificação das cargas típicas:
1. O momento ativo da resistência M c = const
Exemplo: guincho de guincho.
A carga é capaz de ativar o próprio mecanismo, portanto, ele é chamado de ativo. O freio de estacionamento deve ser fornecido para a construção.
2. Momento reactivo de resistência M c = const (carga do tipo de constância do momento)
Típico para mecanismos como "fricção a seco".
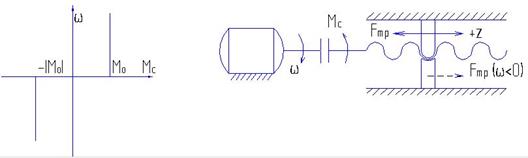
M c = sinal M 0 (w).
w\u003e 0 Þ M c\u003e 0; w<0 Þ М с <0.
O momento reativo é uma reação à velocidade w.
3. Fricção viscosa
M c = α BT ω
O momento de resistência é proporcional à velocidade.
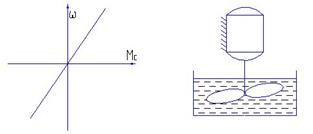
bw é o coeficiente de fricção viscosa.
4. O momento de ventilação
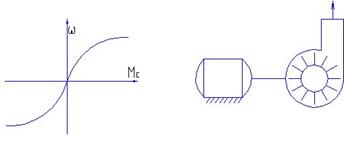
M c = sinal de kw 2 (w).
Típico para ventiladores centrífugos e bombas.
Se a entrada estiver fechada, o torque de carga diminuirá.
P = M c w é o poder.
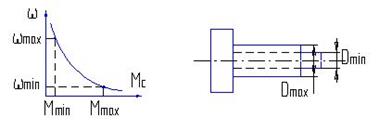
5. Potência constante P = const
Onde P c = const.
É usado frequentemente para as unidades principais de máquinas-ferramentas (torneamento, fresagem, perfuração, trituração e outras máquinas).
w max ∙ M min = w min ∙ M max = const.
Vamos considerar girar:
w = const, F p = const.

Para planer:
P 1 = v min ∙ F max - curso de trabalho, P 1 = v max ∙ F min - marcha lenta.
P 1 »P 2 = const.
Características da seleção do motor:
Em P 1 = 5 kW, obtemos P dv = 5 ∙ 100 = 500 kW.
A seleção direta do motor a partir dos valores limite leva a uma superestimação da potência instalada do motor em D w vezes, onde D w é a faixa de controle de velocidade. Na verdade, a potência do motor pode ser reduzida especificamente, selecionando a faixa de controle de velocidade.
Para DFT, HB é o controle de velocidade para correntes de excitação.
Características mecânicas do motor chamou a dependência da velocidade de rotação rotor a partir do momento no eixo n = f (M2). Uma vez que sob carga, o torque de marcha lenta é pequeno, então M2 ≈ M e a característica mecânica é representada pela dependência n = f (M). Se levarmos em consideração a inter-relação s = (n1 - n) / n1, então a característica mecânica pode ser obtida apresentando sua dependência gráfica nas coordenadas n e M (Fig.
Fig. 1. Característica mecânica de um motor assíncrono
A característica mecânica natural de um motor de indução corresponde ao esquema principal (passaporte) de sua inclusão e aos parâmetros nominais da tensão de alimentação. Características artificiaissão obtidos se forem incluídos elementos adicionais: resistores , reatores , capacitores . Quando o motor é alimentado por uma tensão não avaliada, as características também diferem das características mecânicas naturais.
As características mecânicas são uma ferramenta muito conveniente e útil para a análise dos modos estático e dinâmico da unidade elétrica.
Os principais pontos das características mecânicas: deslizamento crítico e freqüência, torque máximo, torque de partida, torque nominal.
A característica mecânica é a dependência do torque no deslize, ou, em outras palavras, no número de revoluções:
![]()
Da expressão  pode-se ver que essa dependência é muito complicada, já que, como as fórmulas mostram)
pode-se ver que essa dependência é muito complicada, já que, como as fórmulas mostram)  e
e  , slip também entra nas expressões para Eu 2
e cos? 2. A característica mecânica de um motor assíncrono geralmente é dada graficamente
, slip também entra nas expressões para Eu 2
e cos? 2. A característica mecânica de um motor assíncrono geralmente é dada graficamente
O ponto de partida da característica corresponde a n = 0 e s = 1: este é o primeiro instante de partida do motor. Torque de partida M n - uma característica muito importante das propriedades operacionais do motor. Se o M n pequeno, menor do que o torque de operação nominal, o motor só pode ser iniciado ocioso ou com uma carga mecânica correspondentemente reduzida.
Denote by M np O momento reactivo (travagem) criado pela carga mecânica no eixo no qual o motor começa. Uma condição óbvia para a possibilidade de iniciar o motor é: M n > M np . Se esta condição for atendida, o rotor do motor se moverá, o número de revoluções dele n vai aumentar e deslizar s para diminuir. Como pode ser visto a partir da imagem acima, o torque do motor aumenta de M n ao máximo M m , correspondendo a deslizamento crítico s kp, portanto, o excesso de potência disponível do motor, determinado pela diferença de momentos M e M np .
Quanto maior a diferença entre o torque do motor disponível (possível com um deslizamento dado na característica operacional) M e oponente M np , mais fácil o modo de inicialização e quanto mais rápido o motor atingir a velocidade de rotação constante.
Como mostra a característica mecânica, em um certo número de revoluções (a s = s kp) o torque disponível do motor atinge o máximo possível para o motor dado (em uma determinada tensão U ) valores M t . Além disso, o motor continua a aumentar a velocidade de rotação, mas o torque disponível diminui rapidamente. Em alguns valores n e s o torque do motor torna-se igual ao contra-torque: o início do motor está terminado, sua velocidade é ajustada no valor correspondente à razão:
![]()
Esta relação é obrigatória para todas as condições de carga do motor, isto é, para todos os valores M np , não excedendo o torque máximo disponível do motor M t . Dentro desses limites, o motor se adapta automaticamente a todas as flutuações de carga: se durante a operação do motor sua carga mecânica aumentar, por um instante M np será mais do que o momento desenvolvido pelo motor. A velocidade do motor começará a diminuir e o momento aumentará.
A velocidade de rotação é estabelecida em um novo nível correspondente à igualdade M e M np . Quando a carga diminui, o processo de transição para o novo regime de carga será revertido.
Se o torque de carga M np excederá M t , o motor pára imediatamente, assim como com uma redução adicional na velocidade do motor, o torque do motor diminui.
Portanto, o torque máximo do motor M t também é chamado de momento revirando ou crítico.
Se no momento a fórmula ![]() substituto:
substituto:
então temos:
Tomando a primeira derivada de M e, ao igualar a zero, descobrimos que o valor máximo do torque vem quando:
isto é, com tal deslizamento s = s kp , em que a resistência ativa do rotor é igual à resistência indutiva
![]()
Valores s kp a maioria dos motores assíncronos situa-se entre 10 e 25%.
Se na fórmula acima do momento em vez da resistência ativa r 2 substitua o indutivo pela fórmula
![]()
Torque máximo motor assíncrono é proporcional ao quadrado do fluxo magnético (e, portanto, o quadrado da tensão) e inversamente proporcional à indutância da dispersão do enrolamento do rotor.
Quando a tensão aplicada ao motor é constante, seu fluxo F permanece praticamente inalterado.
A indutância da dispersão da corrente do rotor também é praticamente constante. Portanto, quando a resistência ativa no circuito do rotor muda, o valor máximo do torque M t Não vai mudar, mas virá em diferentes deslizamentos (com um aumento na resistência ativa do rotor - para grandes valores de deslizamento).
Obviamente, a carga máxima possível do motor é determinada pelo seu valor M t . A parte de trabalho do desempenho do motor está em uma faixa de velocidade estreita de n, o correspondente M t , até. Quando n = n 1 (ponto final da característica) M = 0, uma vez que na velocidade do rotor síncrono s = 0 e Eu 2 = 0.
O torque nominal que determina o valor da potência nominal do motor geralmente é considerado 0.4-0.6 a partir de M t . Assim, os motores assíncronos permitem sobrecargas de curto-tempo de 2 a 2.5 vezes.
O parâmetro principal que caracteriza o modo de operação de um motor assíncrono é deslizamento s - a diferença relativa entre a velocidade do rotor do motor n e seu campo n o: s = (n o - n) / n o.
A área da característica mecânica correspondente a 0 ≤ s ≤ 1 é a região dos regimes do motor, com s< s кр работа двигателя устойчива, при s > s cr é instável. Para s< 0 и s > 1 o torque do motor é dirigido contra o sentido de rotação do seu rotor (respectivamente travagem regenerativa e travagem por oposição).
Uma porção estável da característica mecânica do motor é freqüentemente descrita a fórmula de Kloss , ao substituir neles os parâmetros do modo nominal, pode-se determinar o deslizamento crítico s cr:
 ,
,
onde: λ = M kp / M - capacidade de sobrecarga do motor.
As características mecânicas de acordo com o diretório ou os dados do catálogo podem ser construídas aproximadamente em quatro pontos (Figura 7.1):
Ponto 1 - idling ideal, n = n o = 60 f / p, M = 0, onde: p - número de pares de pólos do campo magnético do motor;
Ponto 2 - nominal, modo: n = n н, М = М н = 9550 P н / n н, onde potência nominal do motor em kW;
Ponto 3 - modo crítico: n = n cr, M = M cr = λ M n;
Ponto 4 - modo de início: n = 0, M = M início = β M N.
Ao analisar o funcionamento do motor na faixa de carga até M n, e um pouco mais, a parte estável da característica mecânica pode ser descrita grosseiramente pela equação linear n = n 0 - BM, onde o coeficiente "c" é facilmente determinado substituindo os parâmetros do modo nominal n n e M n pela equação.
Projeto de enrolamento de estator. Enrolamentos de loop de camada única e dupla camada.
De acordo com o design das bobinas, os enrolamentos são subdivididos em bobinas moles com bobinas e bobinas com bobinas rígidas ou bobinas. As bobinas macias são feitas a partir de um fio isolado redondo. Para dar a forma desejada, eles são pré-enrolados nos modelos e, em seguida, empilhados em sulcos trapezoidais isolados (ver Figura 3.4, no, ge 3,5, no); As almofadas isolantes de interfase são instaladas durante o processo de enrolamento. Em seguida, as bobinas são reforçadas nos sulcos com a ajuda de cunhas ou tampas, dê-lhes a forma final (formam as partes frontais), engula o enrolamento e impregne-o. Todo o processo de fazer enrolamentos de tipo v pode ser completamente mecanizado.
As bobinas rígidas (semi-bobinas) são feitas de fio isolado retangular. A forma final é dada a eles antes do grouting; Ao mesmo tempo, eles são sobrepostos no corpo e isolamento fase a fase. Em seguida, as bobinas são colocadas em sulcos pré-isolados abertos ou semi-abertos , fortalecer e impregnar.
1. Enrolamentos de camada única - mais adequado para a colocação mecanizada, uma vez que, neste caso, o enrolamento deve ser concêntrico e encaixar nos sulcos do estator com os dois lados da bobina simultaneamente. No entanto, o seu uso leva a um aumento do consumo do fio de enrolamento devido ao comprimento considerável das partes frontais. Além disso, em tais enrolamentos não é possível encurtar o passo, o que leva a uma deterioração na forma do campo magnético no entreferro, aumento de perdas adicionais, aparência de mergulhos na característica mecânica e aumento do ruído. No entanto, devido à sua simplicidade e barateamento, tais enrolamentos são amplamente utilizados em motores assíncronos de pequena capacidade até 10-15 kW.
2. Duas camadas enrolamentos- permitem encurtar o passo de enrolamento para qualquer número de divisões dos dentes, melhorando assim a forma do campo magnético produzido pelo enrolamento e suprimindo os harmônicos mais altos na curva EMF. Além disso, com enrolamentos de dupla camada, obtém-se uma forma mais simples de conexões frontais, o que simplifica o fabrico de enrolamentos. Esses enrolamentos são usados para motores com potência superior a 100 kW com bobinas rígidas que são colocadas manualmente.
Enrolamentos de estator. Enrolamentos de onda de camada única e de duas camadas
Nos sulcos do núcleo do estator, há um enrolamento multifásico, que está conectado à rede de corrente alternada. Enrolamentos simétricos multifase com várias fases tincluir tenrolamentos de fase que se conectam a uma estrela ou polígono. Assim, por exemplo, no caso de um enrolamento de estator trifásico, o número de fases m =3 e os enrolamentos podem ser conectados a uma estrela ou a um triângulo. Os enrolamentos entre as fases são compensados por um ângulo de 360 / t deg; Para um enrolamento trifásico, esse ângulo é de 120 °.
Os enrolamentos de fase são feitos de bobinas separadas conectadas em série, paralelas ou em série paralela. Nesse caso, o bobinasignificamos vários enrolamentos sucessivamente conectados do enrolamento do estator localizados nos mesmos sulcos e com um isolamento comum em relação às paredes da ranhura. Por sua vez bobinaum condutor ativo (isto é, localizado no núcleo do estator) é colocado em dois sulcos sob pólos opostos adjacentes e conectado entre si em série. Os condutores localizados fora do núcleo do estator e conectando os condutores ativos entre si são chamados de partes frontais do enrolamento. As partes rectilíneas das bobinas dos enrolamentos, colocadas nas ranhuras, são chamadas de lados das bobinas ou ranhuras.
Os sulcos do estator em que os enrolamentos são empilhados formam os chamados dentes no lado interno do estator. A distância entre os centros de dois dentes adjacentes do núcleo do estator, medida ao longo da sua superfície voltada para o entreferro, é chamada de divisão dentáriaou divisão de faixas horárias.
Os enrolamentos de bobina cilíndrica de várias camadas (Figura 3) são enrolados de um fio redondo e consistem em bobinas de disco multicamadas localizadas ao longo da haste. Entre as bobinas (através de cada bobina ou através de duas ou três bobinas) podem ser deixados canais radiais para o resfriamento. Esses enrolamentos são usados no lado de alta tensão quando S ≤ 335 kV × A, Eu ≤ 45 A e U ltr ≤ 35 kV.
Os enrolamentos cilíndricos de camada única e dupla camada (Figura 4) são enrolados de um ou vários (até quatro) condutores rectangulares paralelos e são utilizados para S ≤ 200 kV × A, Eu ≤ 800 A e U ltr ≤ 6 kV.
TEMA DE CONFERÊNCIA 10
Características mecânicas dos motores elétricos
PLANO DE CONFERÊNCIA
1. Natural e artificialcaracterísticas mecânicasmotores elétricos
- Dureza características mecânicas
- A característica mecânica natural de um motor de corrente contínua de excitação paralela
- Característica mecânica natural
- Natural
- Característica mecânica de um motor síncrono. Escopo de motores síncronos em navios
A característica mecânica do motor, independentemente do tipo de corrente, é a dependência da velocidade angular do eixo do motor ω (doravante referido como o motor) no momento eletromagnético do motor, isto é, a dependência ω (ω).
Aqui devemos fazer uma observação importante: de acordo com a equação de momentos, no estado estacionário =, o momento eletromagnético do motor contrabalançado momento estático (momento ohm resistência) mecanismo. Isso significa que a magnitude do momento eletromagnético do motor depende completamente do momento do mecanismo?? Quanto mais o torque de frenagem do mecanismo, maior o torque do motor e vice-versa.
Ou seja, para qualquer motor, o valor de entrada é o momento do mecanismo e a saída?? sua velocidade.
A velocidade de quase todos os motores elétricos é uma função decrescente do torque do motor, ou seja, com o aumento do torque, a velocidade diminui [frio 33]. Mas a taxa de mudança de velocidade para diferentes motores elétricos é diferente e é caracterizado por um parâmetro rigidez das características mecânicas.
Rigidez Características mecânicas da unidade elétrica β esta proporção da diferença dos momentos eletromagnéticos do motor em diferentes velocidades para a diferença correspondente nas velocidades angulares do acionamento elétrico.
β = (М 2 ?? М 1) / (ω2 ?? ω1) = Δ / Δω
Normalmente, em áreas de trabalho, as características mecânicas dos motores elétricos têm rigidez negativa β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Distinguido natural e artificialcaracterísticas mecânicase motores elétricos.
Característica mecânica natural ?? esta é a dependência ω (), tomada no normal condições de operação do motor, i.e. em parâmetros nominais rede de abastecimento e a ausência de resistores adicionaisnas correntes dos enrolamentos dos motores.
Os parâmetros da rede elétrica são: a uma corrente constante? tensão, com corrente alternada ?? tensão e freqüência da corrente.
Características obtidas sob condições, diferente do normal, chamado artificial.
As características artificiais podem ser obtidas alterando os parâmetros do motor, por exemplo, inserindo resistores no circuito de enrolamento do indator do motor DC ou na cadeia de enrolamento do rotor do motor assíncrono, ou alterando os parâmetros da rede de suprimento, i. E. tensão e freqüência de corrente alternada.
Cada motor elétrico tem um natural e conjunto de artificial características. O número de características artificiais depende do número de estágios do elemento regulador, por exemplo, o número de etapas do reostato de controle no circuito de enrolamento da armadura do motor DC. Se o motor de tais estágios? cinco, então este mecanismo possui seis características ?? Cinco artificiais e um natural.
As características mecânicas artificiais são usadas para obter tais modos de operação do motor como controle de velocidade, reverso, freio elétrico, etc.
Considere o naturalth Características mecânicas dos motoresdiferentes tipos.
Fig. 10.1 Características mecânicas naturais (a) e angulares (b) do motor síncrono; θ ângulo de atraso do eixo do rotor do eixo do campo magnético do enrolamento do estator
A característica mecânica natural de um motor síncrono
Mecânica naturalcaracterização motor síncrono(Figura 10.1a)? absolutamente rígido?? isso é característica em quea velocidade com a mudança do momento não muda, sua rigidez (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
A velocidade do motor síncrono da velocidade do motor síncrono é explicada pela característica angular do motor síncrono θ () da seguinte forma (Fig. 10.1 b), se a carga mecânica para o rotor não for aplicada, então os enrolamentos do rotor e o campo magnético rotativo do enrolamento do estator coincidem, isto é, θ = 0 ° (ponto 0 na figura 10.1 b). Se o momento eletromagnético do motor for M = 0, o motor está funcionando no ralenti.
Se você aplicar carga mecânica ao eixo do motor e aumentá-lo, o rotor ficará atrás do campo magnético do enrolamento do estator por um ângulo mecânico crescente θ.
Quanto maior a carga mecânica no eixo, maior esse ângulo e maior o momento eletromagnético rotativo do motor.
Isso aumento simultâneo de torque motor causado pelo aumento do torque de frenagem do mecanismo apenas proporciona estabilidade da velocidade do motor (na Figura 10.1 a seção característica é de = 0 a =).
No entanto, a constância da velocidade do motor é mantida enquanto o ângulo θ ≤ 90 °. Em θ = 90 °, o motor desenvolve o momento crítico (máximo) (ponto A na Fig. 10.1 a).
Se a carga mecânica for novamente aumentada em θ = 90 ° (θ\u003e 90 °), o momento eletromagnético do motor diminuirá (segmento AB da característica angular), isto é, Este momento será menor que o torque de freio do mecanismo. Como resultado, a velocidade do rotor do motor irá diminuir e, eventualmente, o rotor irá parar.
Uma vez que neste caso a velocidade do rotor é menor do que a velocidade do campo magnético rotativo dos enrolamentos do estator, diz o motor caiu fora de sincronismo.
Como se segue a partir das características angulares do motor, o motor de perda de sincronismo é condição: ° θ≤90.
Na prática ângulo nominal θ = 20 ... 40 °.
Âmbito de motores síncronos: em navios ?? como motores de propulsão, parafusos rotativos; na margem ?? para mecanismos de acionamento poderosos, como compressores para estações de bombeamento de gás.
característica mecânica natural de um motor de corrente contínua
Natural característica mecânica de um motor de corrente contínuaexcitação simultânea (Fig. 8.5) ??w e stkaya, porque a sua rigidez
β = Δ / Δω ≤ 10%.
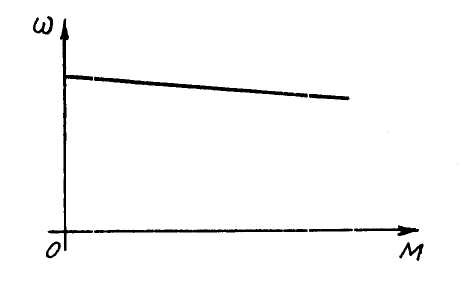
Fig. 10.2 Natural mecânica característica sideexcitation motor de corrente contínua
Isto significa que, quando o binário do motor electromagnético em uma ampla gama a velocidade é suficientemente estável (isto é, não altera significativamente).
Tais motores são utilizados quando quando a carga do mecanismo em uma ampla gama de velocidade do motor não deve ser alterado drasticamente ?? em elétrica bombas, ventiladores, etc.
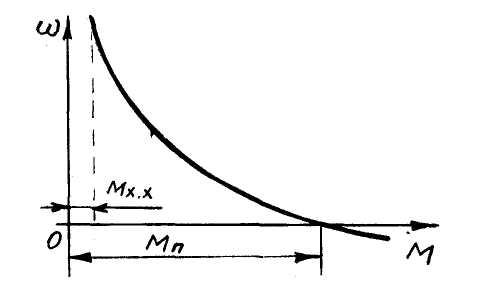
Fig. 10.3 Natural característica velocidade-torquemotor de corrente contínua de excitação série
Natural característica DC corrente do motor de excitação série mecânica (Fig. 10.3) ?? suave Por causa da sua dureza
β = Δ / Δω\u003e 10%.
Isto significa que, quando o binário electromagnético do motor, mesmo em pequena limita a sua velocidade varia muito.
Recall, duas características deste motor motor de corrente contínua de excitação série:
- P ri diminuir a carga mecânica sobre o veio ou a sua ausência (=)
a velocidade do motor aumenta rapidamente, o motor "é corrida." Portanto, este motor não pode ser deixado sem uma carga no eixo;
- Ao ligar o motor produz começando torques maior do que a de outros tipos de motores.
Estes motores não se aplicam aos tribunais, mas são usados na praia, por exemplo, no transporte eléctrico, em particular no carrinho, onde eles não são deixados sem uma carga no eixo e que precisam de alto torque de partida (quando puxando carrinho com espaço).
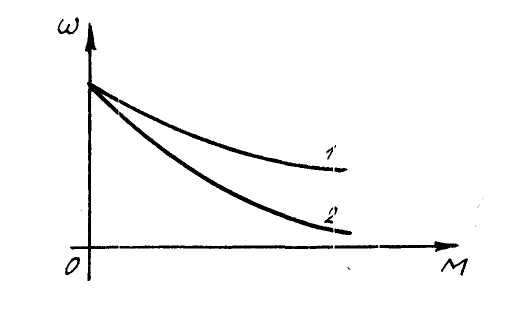
Fig. 10.4 Natural características mecânicas do DC motores de excitação misturada: 1 -Paralelo-série ferida;
2 - consistente com desvio
Natural motor de corrente contínua característica características de excitação mistos mecânicos intermédios entre os mecanismos de excitação simultânea e sequencial, pois excitação fluxo magnético gerado pela ação conjunta dos dois enrolamentos ?? paralelo e em série.
Existem dois tipos de motores de excitação mista:
- com paralela ?? série de excitação cuja maior parte do fluxo magnético resultante produz um enrolamento paralelo (até 70%, os 30% restantes sequcia);
2. sequencialmente com shunt, em que a maior parte do fluxo magnético resultante cria uma série de enrolamento (até 70%, os 30% restantes?? paralelo).
Portanto, o gráfico de características mecânicas do motor do primeiro tipo é mais rígida do que o segundo tipo de motor.
Ambas as propriedades mecânicas?? suave Devido à sua rigidez
β = Δ / Δω\u003e 10%.
Nos navios motores de excitação misturados são aplicados em acionamentos elétricos controlados ?? guinchos, guindastes, guincho e pináculos.
A característica mecânica natural de um motor de indução
Natural o motor de indução característica mecânica tem duas porções ?? junk (overclocking) AB e BC trabalhandoD (Fig. 8,8).
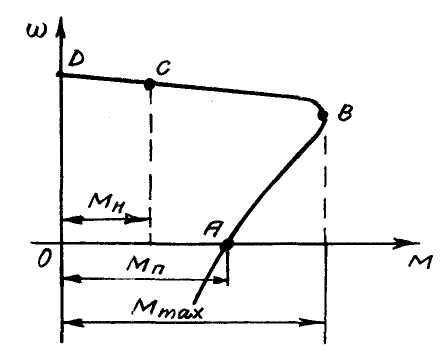
Fig. 10,5 Natural características mecânicas do motor de indução
Ao ligar o motor produz o binário de arranque(OA Segmento), e, em seguida, acelera ao longo do caminho ABC para o ponto C. Assim, a área AB aumentando simultaneamente a velocidade e o torque, a um ponto no motor produz um binário máximo. Na secção BC velocidade continua a aumentar, e o torque é reduzida para o valor nominal (ponto C). no siteBC o motor está sobrecarregado, t. em qualquer lugar nesta seção o torque eletromagnético do motor é maior do que o torque nominal (> >).
Em condições normais, o motor funciona na seção CD cuja rigidez
β = Δ / Δω < 10%.
Isso significa que, quando o torque varia em uma ampla gama, a velocidade do motor muda de forma insignificante.
Os motores assíncronos encontraram a maior aplicação em navios com uma usina de energia CA.
A indústria fabrica motores assíncronos de várias séries, por exemplo, 4A ... ОМ2 (a quarta série de motores assíncronos), MAP (comutação de pólo assíncrono marinho), МТF (com rotor de fase), etc., especialmente para navios.
Assim, os motores de uma série 4A ?? única velocidade, série MAP ?? séries MTF de duas e três velocidades ?? O número de velocidades é determinado pelo circuito de controle (até 5 velocidades).
Palestra 7.
2.5. Características mecânicas de um motor de corrente contínua com excitação em série. Modo motor
O esquema para ligar o motor é mostrado na Fig. 2.8. A armadura do motor M e o enrolamento de excitação de LM estão conectados em série e são fornecidos a partir de uma única fonte de U. Portanto, a corrente de armadura Eu eu é também a corrente de excitação Eu no . Esta circunstância determina a única diferença na concepção de um motor com excitação sucessiva de um motor com excitação independente: a bobina de excitação LM da DCT com excitação sucessiva é feita por um condutor da mesma seção transversal que o enrolamento da armadura.
Fig. 2.8. Diagrama de inclusão de DCT com excitação consecutiva.
Com uma armadura rotativa em seu enrolamento, uma emf é induzida. rotação ^ E. No esquema de ligar a direção do motor E contra a direção U, o que corresponde ao modo de operação do motor. Valor E é igual a:
Onde ?
- velocidade angular do motor; F - fluxo do motor;  - Coeficiente construtivo dos dados do motor para cálculo, que são fornecidos nos livros de referência. Aqui p - número de pares de pólos de motor; N - número de condutores de enrolamento de armadura ativa; um - o número de pares de ramos paralelos do enrolamento da armadura.
- Coeficiente construtivo dos dados do motor para cálculo, que são fornecidos nos livros de referência. Aqui p - número de pares de pólos de motor; N - número de condutores de enrolamento de armadura ativa; um - o número de pares de ramos paralelos do enrolamento da armadura.
Direção de corrente de âncora Eu Eu , como a direção E no diagrama de conexão é mostrado para o modo de operação do motor.
Valor admissível da corrente de ancoragem do motor Eu eu adiciono é limitado pelas condições de comutação e pela resistência mecânica da armadura e não deve exceder a corrente nominal Eu yang mais de 2,5 vezes Eu eu adiciono ? 2.5 I yang .
De acordo com a equação do equilíbrio de estresse sob operação no estado estacionário do motor, a tensão U aplicada ao circuito de ancoragem do motor é equilibrada por uma queda na tensão na corrente de âncora Eu eu R ovo e induzida no enrolamento da ânfora emf. rotação E:
U = I Я R ЯЦ + Е
Onde R JC = R Eu + R DP + R KO + R No + R П - a resistência total da corrente âncora. Aqui R Eu - resistência ao enrolamento da armadura; R DP - resistência ao enrolamento de postes adicionais; R KO - resistência do enrolamento compensatório; R No - resistência do enrolamento de excitação; R П - resistência do reostato de partida.
Valor Eu Eu no estado estacionário será:
No modo de início ^ E = 0, portanto, devido à pequena resistência dos enrolamentos, a corrente de partida Eu Eu sou pode exceder o valor permitido. Para limitar a corrente de partida, utiliza-se um reostato de partida cuja resistência R П é selecionado de tal forma que Eu Eu sou ? Eu Eu sou um DOP
A partir da equação do equilíbrio de estresse para a cadeia de âncora, uma expressão analítica pode ser obtida para a característica mecânica do motor.
Substituindo-o no lugar de emf. rotação ^ E seu valor e resolvendo a equação resultante em relação à velocidade, obtemos a dependência da velocidade do motor ? da corrente da armadura Eu Eu ? = f (I Eu ) , que é chamado de característica eletromecânica:
Uma vez que o enrolamento de excitação é conectado em série com a armadura do motor, o fluxo magnético gerado por ele ^ Φ é uma função atual da armadura Eu Eu . Dependência Ф = f (I Eu ) é chamada de curva de magnetização e tem um caractere não linear do tipo "zona de saturação". Não existe uma descrição analítica precisa desta curva, portanto, também não há uma descrição analítica exata das características mecânicas de DPT com excitação consecutiva. Se, negligenciando a saturação do sistema magnético, assumimos uma relação linear entre F e Eu Eu com um coeficiente de proporcionalidade ?, isto é, Ф =? I Eu , então o torque é:
M = kΦI H = k? I H 2
Portanto, o valor da corrente da armadura será:
Substituindo na equação da característica eletromecânica o valor para Eu eu , obtemos a equação de característica mecânica:
Onde A = U / k?; B = R JC / (k?) - valores constantes.
Uma análise da equação obtida mostra que o eixo das ordenadas é uma assíntota para a curva e que, na região de pequenos valores dos momentos, possui uma grande inclinação
Quando R П =0 e U = U sr. o motor opera com uma característica natural. Para construir uma característica natural, são usadas as chamadas características universais, que são fornecidas nos catálogos para cada série de motores. Eles representam dependências n = f (I Eu ) e M = f (I Eu ) em unidades relativas. Conhecendo os dados nominais do motor, é possível construir sua característica em valores absolutos. Esta característica é mostrada na Fig. 2.9.
Fig. 2.9. Características mecânicas do motor DC de excitação série.
Uma característica da característica é um aumento acentuado da velocidade com uma diminuição no momento de resistência M com o . Portanto, um motor de corrente contínua com excitação em série não pode ser iniciado nos casos em que M com o sr. , uma vez que a velocidade do motor pode exceder o valor admissível ?
adicional =2,5 ?
sr. . Esse recurso pode ser explicado considerando os processos que ocorrem no motor com uma diminuição na carga. Vamos assumir que o motor funcionou no ponto A na característica natural (ver Figura 2.9.) Em estado estacionário com velocidade ?
1
. Quando o momento de resistência diminui com o valor M c1 por exemplo, até M c2 , aparece um momento dinâmico positivo M D >0
e a velocidade do motor começa a aumentar. Com excitação independente, a conseqüência disso é um aumento na emf. rotação  e uma diminuição da corrente da armadura
e uma diminuição da corrente da armadura  e torque
e torque  . Aumentar a velocidade e reduzir o torque do motor continuará até o torque do motor M on será igual M c2 e M D torna-se zero.
. Aumentar a velocidade e reduzir o torque do motor continuará até o torque do motor M on será igual M c2 e M D torna-se zero.
Com excitação sucessiva do emf. rotação E acaba por ser uma função de duas quantidades - aumento da velocidade ? e fluxo decrescente F. Como resultado, a quantidade E, e, portanto, as quantidades Eu Eu e M, com um aumento na velocidade não mudará significativamente, o que leva à conservação de M D >0 e maior aumento de velocidade. Se a resistência do reostato de partida R П >0 , então a queda da velocidade estática ?? com o no mesmo momento do motor será mais do que a característica natural. Portanto, as características do reostato terão uma grande inclinação para o eixo das abcissas.
Com excitação sucessiva, o torque é proporcional ao quadrado da corrente da armadura  e limitando a corrente de partida ao valor Eu Eu sou um DOP ? 2.5I YaN nos permite obter muito mais do que com uma excitação independente M DOP = 5 M H . Fator de sobrecorrente do motor DC com excitação série por torque
e limitando a corrente de partida ao valor Eu Eu sou um DOP ? 2.5I YaN nos permite obter muito mais do que com uma excitação independente M DOP = 5 M H . Fator de sobrecorrente do motor DC com excitação série por torque
K П = M DOP / M H é igual a cinco. Esta capacidade de sobrecarga não é possuída por mais de um motor elétrico. É graças a esta propriedade que os motores com excitação seqüencial são usados em mecanismos elétricos de transporte e elevação.
Palestra 8.
^ 2.6. Características mecânicas de um motor de corrente contínua com excitação em série. Modo de travagem elétrica.
Existem dois modos de travagem elétrica: frenagem dinâmica e travagem pela oposição. A inibição regenerativa não é possível, desde a emf. rotação Enão pode haver mais do que uma tensão de fonte de âncora U.
^ Travagem dinâmica é realizado de duas maneiras: com auto-excitação e com excitação independente. O esquema para ligar o motor e as características mecânicas para o primeiro caso são mostrados na Fig. 2.10.
Fig. 2.10. a) o esquema de ligar o motor no modo de travagem dinâmica com auto-excitação;
B) as características do motor no modo de travagem dinâmica com auto-excitação.
O motor é desconectado da tensão da fonte e o enrolamento de campo é trocado de maneira a que a direção da corrente Eu No foi igual ao modo motor (veja a Figura 2.8). Esta retenção da direção atual elimina a destruição de um pequeno fluxo residual associado à magnetização do estator do motor. Esse fluxo é a causa da auto-excitação: no enrolamento da armadura, girando sob a ação das forças de inércia na direção anterior, induzida uma emf. E, cuja direção é a mesma do modo motor. Sob a ação de E Uma corrente aparece no circuito de travagem dinâmico, o que leva a um aumento no fluxo de Ф, o emf. E e atual Eu Eu . Desde a atualidade Eu Eu em relação ao regime do motor tem a direção oposta, o torque do motor torna-se inibitório. O motor do ponto A no primeiro quadrante passa para o ponto B ou C na característica da travagem dinâmica no segundo quadrante. Inicialmente, o processo de auto-excitação passa muito intensamente e isso leva a um torque de frenagem, o que pode causar impactos na parte mecânica da unidade. Portanto, a travagem dinâmica com excitação independente é mais usada. O esquema para ligar o motor e as características mecânicas são mostrados na Fig. 2.11.
Fig. 2.11. a) o esquema para ligar o motor na dinâmica
Travagem com excitação independente;
B) as características do motor na dinâmica
Travagem com excitação independente.
As braçadeiras da armadura do motor estão em curto-circuito para a resistência à frenagem dinâmica R DT , e o enrolamento de campo está conectado à tensão da fonte através da resistência R No . A corrente nele é dirigida como no modo motor e é ajustada igual à nominal. As características são semelhantes às de DCT com excitação independente: são lineares, localizadas no segundo quadrante e passam pela origem.
^ Parada de desaceleração , no caso de DCT com excitação independente, é realizada no caso de os encadeamentos do motor serem ligados para um sentido de rotação, e a armadura do motor, sob a influência das forças de inércia ou o momento ativo da resistência, roda na direção oposta - contra a inclusão.
Um esquema reversível para ligar o DCT com excitação sucessiva é mostrado na Fig. 2.12.
![]()
Fig. 2.12. Esquema reversível de troca de DCT com excitação série.
O objetivo dos elementos é o mesmo que no circuito da Fig. 2.5. Quando o motor é invertido do lado da armadura, a direção atual no enrolamento de excitação LM é mantida. Portanto, todos os processos durante a travagem são análogos aos que ocorrem no circuito na Fig. 2.5. As características do motor são mostradas na Fig. 2.13.

Fig. 2.13.a) características de DCT com excitação consecutiva no modo de desaceleração por anticoincidência.
B) características semelhantes com Ms ativos.
Palestra 9.
^ 2.7. Características mecânicas dos motores de indução. Modo motor.
Motores assíncronos (AD) - o tipo mais comum de motores, porque eles são mais simples e confiáveis em operação, com igual poder, têm uma massa menor, dimensões e custo em comparação com a DPT. Os esquemas para a inclusão da pressão arterial são mostrados na Fig. 2.14.
Até recentemente, o AD com rotor de gaiola de esquilo era usado em unidades elétricas não regulamentadas. No entanto, com o advento dos conversores de freqüência de tiristores (TPR) da tensão que fornece os enrolamentos do estator de AD, os motores de caixa esquilo foram usados em unidades elétricas ajustáveis. Atualmente, transistores de potência e controladores programáveis são usados em conversores de freqüência. O método de regulação de velocidade é chamado de impulso e sua melhoria é a direção mais importante no desenvolvimento da unidade elétrica.
Fig. 2.14. a) o esquema de ligar o AD com um rotor de gaiola esquilo;
B) o esquema para ligar o AD com um rotor de fase.
A equação para a característica mecânica da pressão sanguínea pode ser obtida com base no esquema de substituição da pressão arterial. Se negligenciarmos a resistência ativa do estator neste circuito, a expressão para a característica mecânica será:
 ,
,
Onde  ;
;  .
.
Aqui M para – momento crítico; S para - o deslizamento crítico correspondente; U f - valor efetivo da tensão de fase da rede; ? 0 = 2? F / p - velocidade angular do campo magnético giratório AD (velocidade síncrona); f Frequência da tensão de alimentação; p - número de pares de pólos de pressão sanguínea; x para - resistência a curto-circuito de fase indutiva (determinada a partir do circuito de substituição); S = (? 0 -?)/? 0 - deslizamento (velocidade do rotor em relação à velocidade do campo rotativo); R 2 1 - resistência ativa total da fase do rotor.
A característica mecânica de um AD com um rotor de gaiola de esquilo é mostrada na Fig. 2.15.
Fig. 2.15. Característica mecânica de um rotor curto-circuito.
Existem três pontos característicos. As coordenadas do primeiro ponto ( S = 0; ? =? 0 ; M = 0). Isso corresponde ao modo de marcha lenta ideal, quando a velocidade do rotor é igual à velocidade do campo magnético rotativo. As coordenadas do segundo ponto ( S = S para ; M = M para). O motor funciona com o torque máximo. Quando M com o \u003e M para o rotor do motor será forçado a parar, o que para o motor é um modo de curto-circuito. Portanto, o torque do motor neste ponto é chamado de crítica M para . As coordenadas do terceiro ponto ( S = 1; ? = 0; M = M n). Neste ponto, o motor funciona no modo de partida: a velocidade do rotor? = 0 e o torque de partida atua no rotor fixo M n . A seção da característica mecânica localizada entre o primeiro e o segundo ponto característico é chamada de seção de trabalho. Sobre ele, o motor funciona em estado estacionário. Com um rotor em curto-circuito, se as condições U = U sr. e f = f sr. uma característica mecânica é chamada natural. Neste caso, na seção de trabalho da característica há um ponto correspondente ao modo de operação nominal do motor e com coordenadas ( S sr. ; ? sr. ; M sr.).
Características eletromecânicas da pressão arterial ? = f (I f ) , que é retratado na Fig.2.15 como uma linha tracejada, em contraste com as características eletromecânicas da DCT, coincide apenas com a característica mecânica na sua seção de trabalho. Isto é devido ao fato de que durante o arranque devido à mudança da frequência do emf. no enrolamento do rotor E 2 a freqüência da corrente e a relação das resistências indutivas e ativas do enrolamento variam: no início do início a freqüência da corrente é grande e a resistência indutiva é maior do que a ativa; com velocidade crescente do rotor ? a frequência da corrente do rotor e, portanto, a resistência indutiva do enrolamento, diminui. Portanto, a corrente de entrada do AD no modo de início direto é 5-7 vezes maior do que o valor nominal Eu fn , eo torque de partida M n é igual ao nominal M sr. . Em contraste com a DPT, onde no arranque é necessário limitar a corrente de partida e o binário de partida, ao iniciar a AD, a corrente de partida deve ser limitada e o torque de partida aumentado. A última circunstância é mais importante, já que o DCT com excitação independente é desencadeado quando M com o sr. , DFT com excitação sequencial em M com o sr. e pressão sanguínea durante a operação em uma característica natural em M com o sr. .
Em AD com um rotor de gaiola de esquilo, um aumento M n Um design especial do enrolamento do rotor é fornecido. A ranhura para o enrolamento do rotor é feita em profundidade, e o enrolamento em si está disposto em duas camadas. Quando o motor é iniciado, a frequência E 2 e as correntes do rotor são grandes, o que leva ao aparecimento do efeito do deslocamento de corrente - a corrente flui apenas na camada superior do enrolamento. Portanto, a resistência do enrolamento e o torque de partida do motor M П . Sua magnitude pode atingir 1.5M sr. .
Em AD com um rotor em fase, um aumento M П é fornecido alterando suas características mecânicas. Se a resistência R П , incluído no caminho de fluxo atual do rotor, é zero - o motor opera com uma característica natural e M П = M H . Quando R П >0 a resistência total ativa da fase do rotor é aumentada R 2 1 . Deslizamento crítico S para como R 2 1 também aumenta. Como conseqüência, em AD com um rotor de fase, a introdução R П no fluxo de corrente do rotor leva a um deslocamento M Para na direção de largas lâminas. Quando S Para = 1 M П = M Para . Características mecânicas de AD com um rotor de fase em R П >0 são chamados artificiais ou reostáticos. Eles são mostrados na Fig. 2.16.
Fig. 2.16. Características mecânicas da AD com um rotor de fase.
Um motor de indução com um rotor de gaiola de esquilo começará em M n \u003e M com o e funcionará no ponto A (veja a Figura 2.15). Depois disso, o momento de resistência M com o pode ser aumentado para M Para . AD, bem como motores de corrente contínua, com aumento M com o automaticamente, sem interferências externas, reduza a velocidade ? e aumentar o torque M enquanto M e M com o Não é igual em tamanho, isto é, do regime estável com uma velocidade mais alta para passar para o modo estável com uma velocidade menor. Ao diminuir M com o o contrário será observado - o motor do estado estavel a uma velocidade mais baixa irá mudar automaticamente para o modo estável a uma velocidade mais alta. A seção de trabalho da característica mecânica de uma pressão sanguínea é análoga à característica mecânica de uma DCT com excitação independente - uma linha reta inclinada ao eixo das abcisas.
Tais propriedades da pressão sanguínea são devidas ao emf. E 2 , que é induzida pelo campo magnético rotativo do estator no enrolamento do rotor. Quando M com o \u003e M momento dinâmico M d e velocidade do rotor ? diminui. O campo magnético do estator girando a uma velocidade constante ? 0 (velocidade síncrona) irá atravessar o enrolamento do rotor com uma alta freqüência. Portanto, o E 2 , a corrente no enrolamento do rotor, a força da Ampere agindo nas voltas e, portanto, o torque M.
A capacidade de sobrecarga do AD para o momento é determinada pela proporção do momento crítico M Para no momento da nominal M H . Para ADs convencionais com um rotor de gaiola de esquilo M Para / M H =1,7 , com um rotor de fase M Para / M H =1,8 . Para pressões especiais da grua com um rotor de gaiola de esquilo do tipo MTK e um rotor de fase do tipo MTKF, a proporção M Para / M H = 2,3 h3.4.