Antipyretika für Kinder werden von einem Kinderarzt verschrieben. Aber es gibt Situationen der Notfallversorgung für Fieber, wenn das Kind die Medizin sofort geben muss. Dann übernehmen die Eltern Verantwortung und wenden Antipyretika an. Was darf man Kindern geben? Wie können Sie die Temperatur bei älteren Kindern senken? Welche Medikamente sind am sichersten?
Die Einfachheit der Umwandlung von Wechselspannung machte es am häufigsten in der Stromversorgung verwendet. Auf dem Gebiet der Konstruktion von Elektromotoren wurde ein weiterer Vorteil von Wechselstrom entdeckt: die Möglichkeit, ein rotierendes Magnetfeld ohne zusätzliche Transformationen oder mit ihrer minimalen Menge zu erzeugen.
Trotz einiger Verluste durch den reaktiven (induktiven) Widerstand der Wicklungen trug daher die Einfachheit der Erzeugung von Wechselstrom-Elektromotoren im frühen 20. Jahrhundert zum Sieg über die Gleichstromversorgung bei.
Im Prinzip können Wechselstrommotoren in zwei Gruppen unterteilt werden:
Asynchron
Bei ihnen unterscheidet sich die Drehzahl des Rotors von der Rotation des Magnetfeldes, so dass sie mit unterschiedlichen Geschwindigkeiten arbeiten können. Diese Art von AC-Elektromotoren ist die häufigste in unserer Zeit. Synchron
Diese Motoren haben eine starre Beziehung zwischen der Rotordrehzahl und der Rotationsgeschwindigkeit des Magnetfelds. Sie sind schwieriger herzustellen und in der Anwendung weniger flexibel (eine Änderung der Geschwindigkeit bei einer festen Frequenz des Versorgungsnetzes ist nur durch Ändern der Anzahl der Pole des Stators möglich).
Sie finden nur bei hohen Leistungen von mehreren hundert Kilowatt Anwendung, wo ihr größerer Wirkungsgrad im Vergleich zu Asynchronmotoren die Wärmeverluste deutlich reduziert.
Wechselstrom-Induktions-Elektromotor
Der gebräuchlichste Typ eines Induktionsmotors ist ein Elektromotor mit Käfigläufertyp, bei dem ein Satz leitfähiger Stäbe von den Enden, die durch Ringe verbunden sind, in die geneigten Nuten des Rotors gelegt wird.
Die Geschichte dieser Art von Elektromotoren hat mehr als einhundert Jahre, als beobachtet wurde, dass ein leitfähiges Objekt, das in dem Spalt des Kerns eines Wechselstrom-Elektromagneten platziert ist, dazu neigt, aufgrund des Entstehens einer EMF-Induktion mit einem gegengerichteten Vektor aus diesem zu entkommen.
Somit weist der Kurzschlussläuferinduktionsmotor außer den Rotorlagerlagern keine mechanisch kontaktierenden Komponenten auf, die diesen Motortyp nicht nur zu einem niedrigen Preis, sondern auch mit der höchsten Haltbarkeit liefern. Aus diesem Grund wurden Elektromotoren dieses Typs in der modernen Industrie am weitesten verbreitet.
Sie haben jedoch gewisse Nachteile, die bei der Auslegung derartiger Asynchronmotoren berücksichtigt werden müssen:
Hoher Einschaltstrom - Da in dem Moment, wenn der asynchrone bürstenlose Elektromotor eingeschaltet wird, der Blindwiderstand der Statorwicklung immer noch nicht durch das vom Rotor erzeugte Magnetfeld beeinflusst wird, gibt es einen starken Stromstoß, der mehrere Male größer ist als der Nennstrom des Verbrauchs.
Dieses Merkmal des Betriebs dieses Motortyps muss bei allen vorgesehenen Stromversorgungen verlegt werden, um Überlastungen zu vermeiden, insbesondere beim Anschluss von asynchronen Elektromotoren an mobile Generatoren mit begrenzter Leistung.
Geringes Anlaufmoment - Elektromotoren mit einem kurzgeschlossen, eine starke Abhängigkeit des Drehmoments von der Wickelgeschwindigkeit hat, so dass ihre Aufnahme unter der Last ist höchst unerwünscht: signifikant erhöhte Zeit auf Nennbetrieb und Ausgangsströme, die Statorwicklung überlastet ist.
Dies geschieht beispielsweise beim Einschalten tiefer Pumpen - in den Stromkreisen ihrer Stromversorgung muss eine fünf- bis siebenfache Stromreserve berücksichtigt werden.
Unmöglichkeit des direkten Starts in einphasigen Stromkreisen - Damit der Rotor zu rotieren beginnt, ist es notwendig, den Tippbetrieb zu starten oder zusätzliche phasenverschobene Phasenwicklungen einzuführen.
Um einen Asynchron-Wechselstrommotor in einem einphasigen Netz zu starten, wird entweder die manuell geschaltete Startwicklung getrennt, nachdem der Rotor entdrillt ist, oder die zweite Wicklung durch das Phasenrotationselement (meistens ein Kondensator mit der erforderlichen Kapazität).
Keine Möglichkeit, hohe Geschwindigkeit zu erhalten - bei der Drehung des Rotors und mit der Drehfrequenz des magnetischen Feldes des Stators nicht synchronisiert ist, aber es kann voraus sein, so dass die 50 Hz maximale Geschwindigkeit für einen Asynchronmotor mit Rotorkäfig - nicht mehr als 3000 U / min.
Die Erhöhung der Drehzahl eines Induktionsmotors erfordert die Verwendung eines Frequenzumrichters (Wechselrichters), wodurch ein solches System teurer wird als ein Kollektormotor. Wenn die Frequenz zunimmt, nehmen außerdem die reaktiven Verluste zu.
Die Schwierigkeit, Reverse zu organisieren - Dies erfordert eine vollständige Motorabschaltung und Phasenzusammensetzung in einer einphasigen Version - Phasenverschiebung in der Start- oder zweiten Phasenwicklung.
Die bequemste Verwendung eines asynchronen elektrischen Motors in einem industriellen drei-Phasen-Netzwerk , da die Erzeugung eines rotierenden Magnetfeldes durch die Phasenwicklungen selbst ohne zusätzliche Einrichtungen erfolgt.
In der Tat, eine Kette, bestehend aus Drehstromgenerator und den Motor kann als ein Beispiel einer elektro Übertragungen angesehen werden: Antriebsgenerator erzeugt darin ein rotierendes Magnetfeld in elektrische Stromschwingungen umgewandelt werden, die wiederum drehende Erregungs Magnetfeld in dem Motor.
Darüber hinaus ist es für die dreiphasig betriebene Motoren mit der höchsten Effizienz, weil einzelne Phase Magnetfeld, das durch den Stator erzeugt, im wesentlichen in zwei gegenphasige zerlegt werden kann, die die Übersättigung des nutzlosen Verlustes des Kerns erhöht. Daher werden leistungsstarke einphasige Elektromotoren üblicherweise gemäß einer Kollektorschaltung ausgeführt.
ELEKTROMOTOR-SAMMLER
Bei Elektromotoren dieser Art wird das Magnetfeld des Rotors durch Phasenwicklungen erzeugt, die mit dem Kollektor verbunden sind. Tatsächlich unterscheidet sich der Wechselstrommotorkollektor nur dadurch von dem Gleichstrommotor, dass die Reaktanz der Wicklungen in seine Berechnung einbezogen wird.
In einigen Fällen werden sogar generische Kollektormotoren erzeugt, bei denen die Statorwicklung einen Abzweig von dem unvollständigen Teil hat, der mit dem Wechselstromnetz zu verbinden ist, und die Stromquelle kann mit der vollen Wicklungslänge verbunden sein.
Die Vorteile dieses Motortyps liegen auf der Hand:
Fähigkeit, mit hoher Geschwindigkeit zu arbeiten ermöglicht die Herstellung von elektrischen Kollektormotoren mit einer Geschwindigkeit von bis zu mehreren zehntausend Umdrehungen pro Minute, die allen elektrischen Bohrmaschinen vertraut sind.
Keine Notwendigkeit für zusätzliche Trigger im Gegensatz zu den Motoren mit Kurzschlussläufer.
Hohes Startmoment, die den Ausgang in den Betriebsmodus beschleunigt, auch unter Last. Darüber hinaus ist das Drehmoment des Kollektormotors umgekehrt proportional zu den Umdrehungen und wenn die Last zunimmt, vermeidet es das Absenken der Drehzahl.
Einfache Geschwindigkeitskontrolle - Da sie von der Versorgungsspannung abhängen, ist es ausreichend, den einfachsten Triac-Spannungsregler zu haben, um die Drehzahl innerhalb der weitesten Grenzen einzustellen. Fällt der Regler aus, kann der Kollektormotor direkt an das Netzwerk angeschlossen werden.
Weniger Trägheit des Rotors - es kann viel kompakter als bei einem Kurzschluss gemacht werden, so dass der Kollektormotor selbst merklich kleiner wird.
Außerdem kann der Kollektormotor elementar umgekehrt sein, was besonders wichtig ist, wenn eine Vielzahl von Elektrowerkzeugen und eine Anzahl von Maschinen hergestellt werden.
Aus diesem Grund sind Kollektormotoren in allen einphasigen Verbrauchern weit verbreitet, wo eine flexible Geschwindigkeitssteuerung notwendig ist: in elektrischen Handwerkzeugen, Staubsaugern, Küchengeräten und so weiter. Eine Reihe von Konstruktionsmerkmalen bestimmt jedoch den spezifischen Betrieb des Kollektormotors:
Kollektormotoren erfordern einen regelmäßigen Austausch von Bürsten, die sich mit der Zeit abnutzen. Der Kollektor selbst trägt ebenfalls, während der Motor mit einem Kurzschlussläufer, wie oben bereits erwähnt, unter der Bedingung eines seltenen Lageraustausches praktisch ewig ist.
Unvermeidlich funken zwischen dem Kollektor und Bürsten (Ursache all den vertrauten Geruch von Ozon während des Betriebs des Kommutatormotors) reduziert nicht nur weiter die Ressource, sondern erfordert auch erhöhte Sicherheitsvorkehrungen wegen der Wahrscheinlichkeit einer Entzündung von brennbaren Gasen oder Staub.
© 2012-2017 Alle Rechte vorbehalten.
Alle Materialien auf dieser Website sind nur informativer Natur und können nicht als Richtlinien und normative Dokumente verwendet werden
Einphasen-Elektromotor 220V ist ein separater Mechanismus, der für den Einbau in eine Vielzahl von Geräten verwendet wird. Es kann für häusliche und industrielle Zwecke verwendet werden. Der elektrische Motor wird von einer gewöhnlichen Steckdose aus betrieben, wo notwendigerweise eine Leistung von mindestens 220 Volt vorhanden ist. Es sollte auf die Häufigkeit von 60 Hertz achten.
In der Praxis hat sich erwiesen, dass ein einphasiger 220 V-Motor zusammen mit Geräten verkauft wird hilfe umwandeln die Energie eines elektrischen Feldes, und akkumulieren auch die notwendige Ladung mit einem Kondensator. Moderne Modelle, die mit innovativen Technologien hergestellt werden, 220V Elektromotoren sind zusätzlich mit Geräten ausgestattet, um den Arbeitsplatz des Geräts zu beleuchten. Dies gilt für interne und externe Teile.
Es ist wichtig zu beachten, dass die Kapazität des Kondensators in Übereinstimmung mit allen grundlegenden Anforderungen gespeichert werden muss. Die beste Option ist der Ort, an dem die Lufttemperatur bleibt unverändert und unterliegt keinen Schwankungen. In dem Raum sollte das Temperaturregime nicht auf einen Minuswert abgesenkt werden.
Während der Verwendung des Motors empfehlen Experten, von Zeit zu Zeit die Kapazität des Kondensators zu messen.
 Asynchronmotoren werden heute für verschiedene Produktionsprozesse häufig verwendet. Für verschiedene Antriebe wird dieses Modell des Elektromotors verwendet. Einphasige asynchrone Strukturen helfen, Holzbearbeitungsmaschinen, Pumpen, Kompressoren, industrielle Lüftungsanlagen, Förderbänder, Aufzüge und viele andere Geräte zu fahren.
Asynchronmotoren werden heute für verschiedene Produktionsprozesse häufig verwendet. Für verschiedene Antriebe wird dieses Modell des Elektromotors verwendet. Einphasige asynchrone Strukturen helfen, Holzbearbeitungsmaschinen, Pumpen, Kompressoren, industrielle Lüftungsanlagen, Förderbänder, Aufzüge und viele andere Geräte zu fahren.
Der Elektromotor wird auch zum Antrieb kleiner Mechanisierungen verwendet. Dazu gehören die Futterhäcksler und Betonmischer. Kaufen Sie diese Strukturen nur von vertrauenswürdigen Lieferanten. Vor dem Erwerb ist es wünschenswert, die Konformitätsbescheinigungen und die Herstellergarantie zu überprüfen.
Lieferanten müssen ihre Kunden bereitstellen service des Elektromotors im Falle einer Störung oder eines Versagens. Dies ist eine der Hauptkomponenten, die während der Montage der Pumpeneinheit vervollständigt wird.
Bestehende Serie von Elektromotoren
Heute produzieren Industrieunternehmen die folgende Reihe von Einphasen-Elektromotor 220V:

Absolut alle Motoren sind auf ein Design unterteilt, durch die Art der Installation, sowie die Schutzart. Dadurch können Sie die Struktur vor Feuchtigkeit oder mechanischen Partikeln schützen.
Merkmale der A-Serie Elektromotoren
Elektrische Einphasenmotoren der Serie A sind einheitliche asynchrone Ausführungen. Sie sind durch einen kurzgeschlossenen Rotor vor äußeren Einflüssen geschlossen.
Die Motorstruktur hat folgende Ausführungsgruppen:

Die Kosten eines einphasigen 220V-Motors hängen von der Serie ab.
Was sind die verschiedenen Arten von Motoren?

Einphasenmotoren sind für den Betrieb von elektrischen Antrieben bestimmt, die einen häuslichen und industriellen Zweck haben. Solche Designs werden in Übereinstimmung mit staatlichen Standards hergestellt.
Anwendungsbereiche Asynchronmotoren mit niedriger Leistung (15 - 600 W) werden in automatischen Geräten und elektrischen Geräten zum Antrieb von Lüftern, Pumpen und anderen Geräten verwendet, die keine Drehzahlregelung benötigen. In elektrischen Geräten und Automaten werden üblicherweise einphasige Mikromotoren verwendet, da diese Geräte und Geräte üblicherweise von einem einphasigen Wechselstromnetz gespeist werden.
Das Prinzip der Operation und die Vorrichtung eines Einphasenmotors. Die Statorwicklung eines einphasigen Motors (Bild 4.60, a)befindet sich in Nuten, die etwa zwei Drittel des Umfangs des Stators einnehmen, was einem Polpaar entspricht. Ergebend
(siehe Kapitel 3), die Verteilung von MDS und Induktion im Luftspalt ist nahezu sinusförmig. Wenn der Wechselstrom die Wicklung durchläuft, pulsiert der MDS mit der Netzfrequenz in der Zeit. Induktion an einem beliebigen Punkt des Luftspaltes
In x = In m sinωtcos (πx / τ).
Bei einem einphasigen Motor erzeugt die Statorwicklung somit eine stationäre Strömung, die sich mit der Zeit verändert, und nicht wie bei Drehstrommotoren mit symmetrischer Leistung eine kreisförmige Drehströmung.
Um die Analyse der Eigenschaften eines einphasigen Motors zu vereinfachen, stellen wir (4.99) in der Form dar
Bei x = 0,5 V ist sin (ωt - πx / τ) + 0,5V sin (ωt + πx / τ),.
das heißt, wir ersetzen die feste pulsierende Strömung durch die Summe von identischen kreisförmigen Feldern, die in entgegengesetzten Richtungen rotieren und die gleichen Rotationsfrequenzen haben: n 1pr = n 1ob = n 1. Da die Eigenschaften eines Asynchronmotors mit einem rotierenden Kreisfeld in § 4.7 - 4.12 ausführlich behandelt werden, kann eine Analyse der Eigenschaften eines einphasigen Motors auf die Berücksichtigung der gemeinsamen Wirkung jedes der rotierenden Felder reduziert werden. Mit anderen Worten, ein einphasiger Motor kann als zwei identische Motoren dargestellt werden, deren Rotoren starr verbunden sind (Abbildung 4.60, b), mit der entgegengesetzten Drehrichtung der Magnetfelder und den von ihnen erzeugten Momenten M pr und M arr. Ein Feld, dessen Drehrichtung mit der Drehrichtung des Rotors übereinstimmt, wird als direkt bezeichnet; Feld der umgekehrten Richtung - invers oder umgekehrt.
Angenommen, die Drehrichtung der Rotoren fällt mit der Richtung eines der Drehfelder zusammen, beispielsweise mit n Pr. Dann erfolgt das Gleiten des Rotors relativ zur Strömung F pr
s pr = (n 1pr - n 2) / n 1 pr = (n 1 - n 2) / n 1 = 1 - n 2 / n 1..
Schlupf des Rotors relativ zur Strömung
s ob = (n 1obr + n 2) / n 1obr = (n 1 + n 2) / n 1 = 1 + n 2 / n 1..
Aus (4.100) und (4.101) folgt daraus
s o6p = 1 + n 2 / n 1 = 2 - s pr..
Elektromagnetische Momente M pr und M obr, gebildet durch direkte und umgekehrte Felder, sind in entgegengesetzte Richtungen gerichtet, und das resultierende Moment eines einphasigen Motors M Der Schnitt ist gleich der Differenz der Momente bei gleicher Rotordrehzahl.
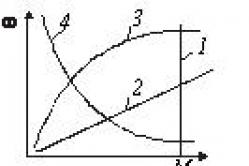
In Abb. 4.61 zeigt die Abhängigkeit M = f (s) für einen einphasigen Motor. In Anbetracht der Zeichnung können wir folgende Schlüsse ziehen:
a) der einphasige Motor hat kein Anlaufmoment; es dreht sich in der Richtung, in der es von einer äußeren Kraft angetrieben wird; b) die Frequenz der Drehung eines einphasigen Motors im Leerlauf ist geringer als die eines dreiphasigen Motors aufgrund des durch das Rückstellfeld erzeugten Bremsmoments;
c) die Leistung eines einphasigen Motors ist schlechter als die eines dreiphasigen Motors; es hat einen erhöhten Schlupf bei Nennlast, weniger Wirkungsgrad, weniger Überlastfähigkeit, was auch durch das Vorhandensein eines inversen Feldes erklärt wird;
d) die Leistung eines einphasigen Motors beträgt etwa 2/3 der Leistung eines gleich großen Drehstrommotors, da bei einem einphasigen Motor die Arbeitswicklung nur 2/3 der Statornuten einnimmt. Alle Statornuten füllen
da der Wicklungskoeffizient klein ist, erhöht sich der Kupferverbrauch um etwa das 1,5-fache, während die Leistung nur um 12% zunimmt.
Startgeräte. Um das Anlaufdrehmoment zu erhalten, haben einphasige Motoren eine Startwicklung, die um 90 Grad relativ zur Hauptarbeitswicklung verschoben ist. Für die Anlaufzeit ist die Anlaufwicklung über phasenschiebende Elemente - Kapazität oder aktiver Widerstand - mit dem Netzwerk verbunden. Nach dem Ende der Beschleunigung des Motors wird die Startwicklung abgeschaltet, während der Motor als einphasige Wicklung weiterarbeitet. Da die Startwicklung nur für kurze Zeit arbeitet, besteht sie aus einem Draht mit einem kleineren Querschnitt als der Arbeitsdraht und ist in eine kleinere Anzahl von Nuten gepackt.
Betrachten wir den Anlaufvorgang bei Verwendung der Kapazität C als phasenschie- bendes Element näher (Abb. 4.62, a). Auf der Startwicklung П Spannung
Ú
In = Ú
1 - Ú
C = Ú
1 +jÍ 1 n XCh. es ist gegenüber der Netzspannung phasenverschoben U 1, auf die Arbeitswicklung angewendet P. Folglich sind die aktuellen Vektoren in der Arbeit Ich 1p und starten Ich In Wicklungen sind in der Phase um einen Winkel verschoben. Wenn man die Kapazität eines phasenverschiebenden Kondensators in einer bestimmten Weise wählt, ist es möglich, einen Startmodus nahe bei einem symmetrischen (Fig. 4.62b) zu erhalten, dh ein kreisförmiges Drehfeld zu erhalten. In Abb. 4.62, in den gezeigten Abhängigkeiten M = f (s) für den Motor mit der (1) eingeschaltet und die Startwicklung aus (Kurve 2). Starten Sie den Motor wird auf einem Teil ausgeführt ab Eigenschaften 1; an dem Punkt bdie Startwicklung ist ausgeschaltet, und in Zukunft arbeitet der Motor an einem Teil cO Eigenschaften 2.
Da die Aufnahme der zweiten Wicklung die mechanischen Eigenschaften des Motors wesentlich verbessert, werden in einigen Fällen Einphasenmotoren verwendet, bei denen die Wicklungen A und B
sind die ganze Zeit enthalten (Abbildung 4.63, a). Solche Motoren werden als Kondensatoren bezeichnet.
Beide Wicklungen von Kondensatormotoren haben in der Regel die gleiche Anzahl von Steckplätzen und haben die gleiche Leistung. Wenn der Kondensator Motorstart das Startdrehmoment zu erhöhen, ist sinnvoll, die ein großen Kapazität C p + C p zu haben. Wenn die Motorbeschleunigung Charakterisierung 2 (Fig. 4,63, b) und den Stromteil Kondensator CH Verringerung ausgeschaltet ist, so dass, wenn der Nennbetrieb (wenn der Motorstrom kleiner wird, als beim Start), um den kapazitiven Widerstand zu erhöhen und Arbeit des Motors in den Bedingungen nahe bei der Arbeit an einem kreisförmigen rotierenden Feld zur Verfügung zu stellen. In diesem Fall arbeitet der Motor mit der Kennlinie 1.
Der Kondensatormotor hat einen hohen cos φ. Nachteile sind die relativ große Masse und Abmessungen des Kondensators sowie das Auftreten eines nichtsinusförmigen Stromes mit Verzerrungen der Versorgungsspannung, die in manchen Fällen zu schädlichen Auswirkungen auf die Kommunikationsleitung führt.
Bei leichten Startbedingungen (geringes Lastmoment in der Anlaufphase), Anfahrmotoren R (Abbildung 4.64, a). Das Vorhandensein eines aktiven Widerstandes in der Startwicklungsschaltung liefert eine kleinere Phasenverschiebung φn zwischen der Spannung und dem Strom in dieser Wicklung (Fig. 4.64, b) als die Phasenverschiebung Φp in der Arbeitswicklung. Die Ströme in den Arbeits- und Anlaufwicklungen erweisen sich dabei um einen Winkel φ p - φ n als phasenverschoben und bilden ein asymmetrisches (elliptisches) Drehfeld, wodurch das Anlaufmoment entsteht. Motoren mit Anlaufwiderstand sind zuverlässig im Betrieb und werden serienmäßig hergestellt. Der Anlaufwiderstand ist in das Motorgehäuse eingebaut und wird mit der gleichen Luft gekühlt, die den gesamten Motor kühlt.
Einphasige Mikromotoren mit geschirmten Polen. Bei diesen Motoren wird die mit dem Gitter verbundene Statorwicklung üblicherweise an den deutlich ausgedrückten Polen konzentriert und verstärkt (Abbildung 4.65, a), deren Bleche zusammen mit dem Stator gestanzt werden. An jedem Pol ist eine der Spitzen mit einer Hilfswicklung bedeckt, die aus einer oder mehreren kurzgeschlossenen Windungen besteht, die 1/5 bis 1/2 Polpole abschirmen. Der Rotor des Motors ist ein kurzgeschlossener herkömmlicher Typ.
Der magnetische Fluß der Maschine erzeugte die Statorwicklungen (pole Fluss), können als die Summe von zwei Komponenten (Figur 4,65, b.) F n = F + F n1, n2, wobei n1 F dargestellt werden - Durchfluss durch das Polstück nicht abgedeckt korotkozamknu- Spule; N n2 ist der Fluss, der durch einen Teil des Pols fließt und durch eine kurzgeschlossene Windung abgeschirmt wird.
Die Flüsse ÄP1 und NF2 durchlaufen verschiedene Teile des Polschuhs, dh sie sind im Raum um den Winkel β verschoben. Außerdem sind sie gegenüber dem MDS phasenverschoben F n Statorwicklungen in verschiedenen Winkeln - γ 1 und γ 2. Dies wird dadurch erklärt, dass jeder Pol des beschriebenen Motors in erster Näherung als ein Transformator betrachtet werden kann, dessen Primärwicklung die Statorwicklung und die Sekundärwicklung eine kurzgeschlossene Spule ist. Der Fluss der Statorwicklung induziert einen Kurzschluss der EMK E zu (Bild 4.65, c), wodurch ein Strom entsteht Ich zu und MDS F zu entwickeln mit dem MDS F n Statorwicklungen. Blindstromkomponente Ich k verringert den Fluss Φ n2, während der aktive ihn in Phase relativ zum MDS verschiebt F N. Da die Strömung F n1 nicht geschlossene Schleife enthält, γ 1 Winkel hat einen vergleichsweise kleinen Wert (4-9 °) - in etwa das gleiche wie die Phasenwinkel zwischen dem Stromwandler und der Primär von MDS in einem Leerlaufmodus Wicklung. Der Winkel γ 2 ist viel größer (etwa 45 °), d. H. Wie bei einem Transformator mit einer Sekundärwicklung, der kurzgeschlossen ist (beispielsweise in einem Strommesswandler). Dies erklärt sich dadurch, dass die von dem Winkel γ 2 abhängigen Leistungsverluste nicht nur von den magnetischen Leistungsverlusten im Stahl, sondern auch von den elektrischen Verlusten in der kurzgeschlossenen Spule bestimmt werden.
Abb. 4.65. Design-Diagramme eines einphasigen Motors mit geschirmten Polen und seiner
Vektordiagramm:
1
- Stator; 2 -
statorwicklung; 3 -
spritzen
Spule; 4 -
rotor; 5
- Stange
Die Ströme F n1 und P n2 sind im Raum um einen Winkel β versetzt und das phasenverschobene zeitlich um einen Winkel γ = γ 2 - γ l, ein elliptisches rotierendes Magnetfeld bilden (siehe Kapitel 3 ..), die das Drehmoment übernimmt auf dem Rotor wirkenden Motor in der Richtung von dem ersten Polstück, das nicht von der kurzgeschlossenen Windung bis zur zweiten Spitze bedeckt ist (in Übereinstimmung mit dem Wechsel der Maxima der "Phasen" -Ströme).
das Anlaufmoment des Gleichstrommotors zu erhöhen, indem sie an das kreisförmige Drehfeld unter Verwendung verschiedene Verfahren annähert: Zwischen Polflächen benachbarter Magnetpolen Shunts, die die magnetische Kopplung zwischen der Primärspule und der kurzgeschlossenen Windung und verbessern die Form des Magnetfeldes in dem Luftspalt zu verbessern; Vergrößern Sie den Luftspalt unter der Spitze, die nicht von einer kurzgeschlossenen Kurve abgedeckt wird; Verwenden Sie zwei oder mehr kurzgeschlossene Windungen an einer Spitze mit unterschiedlichen Deckungswinkeln. Es gibt auch Motoren ohne Kurzschluss an den Polen, aber mit einem asymmetrischen Magnetsystem: verschiedene Konfigurationen der einzelnen Teile des Pols und verschiedene Luftspalten. Solche Motoren haben ein kleineres Anlaufdrehmoment als Motoren mit abgeschirmten Polen, aber ihr Wirkungsgrad ist höher, da sie in kurzgeschlossenen Windungen keine Leistungsverluste haben.
Die betrachteten Konstruktionen von Motoren mit abgeschirmten Polen sind nicht umkehrbar. Um das Gegenteil in solchen Motoren anstelle von kurzgeschlossenen Spulen zu implementieren, werden Spulen verwendet B1, B2, B3und B4(Abbildung 4.65, in der), die jeweils die halbe Stange überspannen. Kurzschluss ein paar Spulen B1und B4oder B2und B3ist es möglich, die eine oder die andere Hälfte des Pols abzuschirmen und somit die Drehrichtung des Magnetfeldes und des Rotors zu ändern.
Der Motor mit abgeschirmten Polen weist eine Anzahl signifikanter Nachteile auf: relativ große Gesamtabmessungen und Masse; niedriger cos φ ≈ 0,4 ≈ 0,6; niedriger Wirkungsgrad η = 0,25 ÷ 0,4 wegen großer Verluste in der kurzgeschlossenen Spule; kleines Startdrehmoment usw. Vorteile des Motors sind die Einfachheit des Designs und daher eine hohe Zuverlässigkeit im Betrieb. Aufgrund des Fehlens von Zähnen am Stator ist das Motorgeräusch unbedeutend, weshalb es häufig in Geräten zur Wiedergabe von Musik und Sprache verwendet wird.
3-7. Vorrichtung von asymmetrischen einphasigen Elektromotoren
In Abb. 3-16 zeigt das Gerät eines asynchronen Einphasen-AOLB-Motors mit eingebautem Startwiderstand. Der Stator ist aus gestanztem Blech aus Elektrostahl 15 verdichtet und gefüllt in einen Aluminiumbeutel (Statorgehäuse) mit einer Doppelwand zusammengesetzt 13. Zwischen den Wänden Kanäle zur Luftkühlung der Statoroberfläche gebildet sind. Auf das Schärfen des Statorgehäuses sind zwei Abdeckungen 2 und 17 aus einer Aluminiumlegierung aufgegossen.
Die vordere Abdeckung 17 ist mit einer gestanzten Kappe 18 mit Löchern in der Endfläche versehen. Durch diese Öffnungen nimmt, wenn sich der Rotor dreht, das Gebläse 19, das an dem Ende der Rotorwelle angebracht ist, die Luft auf. Der Lüfter ist aus einer Aluminiumlegierung gegossen und mit einer Schraube an der Welle befestigt.
In den Statorblechen sind 24 Nuten der birnenförmigen Form eingeprägt. Von diesen sind 16 Schlitze an den Drähten der Arbeitswicklung und 8 Schlitze für die Drähte der Startwicklung besetzt. Auslaßenden der Arbeits- und Wicklungen beginnend von Kontaktschrauben zurückgezogen 4 angeordnet, in dem Anschlusskasten 11. Der Rotorkern 12 wird aus Elektrostahlblech zusammengebaut und gedrückt auf die gerillte Oberfläche des Mittelteils der Welle 1. Die Rotornuten gefüllt mit Aluminium 14 mit dem Verriegelungsring und den Lüfterschaufeln Wicklung. Der Zweck des Ventilators ist es, die erwärmte Luft zu den gekühlten Außenwänden des Gehäuses abzuleiten.
![]()
Der Fliehkraftschalter der Startwicklung ist auf dem Rotor montiert. Sie besteht aus zwei Hebeln 7 mit Gegengewichten 9, die auf den Achsen 8 sitzen, die in vier Lüfterflügel eingepreßt sind. Die Hebel werden mit Stiften 6 auf die frei auf der Welle sitzende Kunststoffhülse 5 gedrückt. Wenn die Beschleunigung des Rotors, wenn die Frequenz des Drehens der nominellen Gegengewichte unter der Wirkung der Zentrifugalkraft nähert divergieren, indem die Hebel um die Achsen drehen.
In diesem Fall bewegt sich die Hülse 5 nach rechts, komprimiert die Feder 10 und gibt den Federkontakt 4 frei, der den Startwicklungskreis schließt. Dieser Kontakt mit dem feststehenden Rotor ist durch das Ende der Hülse mit dem festen Kontakt 3 verschlossen.
Bewegend und stationäre Kontakte sind auf der Isolationsplatte an die Rückseite des Motors angebracht 2. Thermoschalter verstärkt, die den Motor aus dem Netz unterbrechen, wenn es zu heiß wird. Der Ständer 16 mit vier Bolzen dient zur Montage des Motors.
Die Schaltung zum Einschalten des Elektromotors ist in Abb. 3-17.
Die Versorgungsspannung wird den Anschlüssen C1 und C2 zugeführt. Von diesen Anschlüssen wird die Spannung an die Arbeitswicklung über die Kontakte des Thermorelais PT angelegt, bestehend aus einer Wicklung, einer Bimetallplatte und Kontakten. Wenn der Motor über die zulässige Platte erhitzt wird, biegen sich die Kontakte und öffnen sich. Wenn ein Kurzschluss durch die Wicklung des Thermorelais auftritt, fließt ein großer Strom, die Platte erwärmt sich schnell und öffnet die Kontakte. In diesem Fall werden die arbeitenden C- und Start-P-Wicklungen entregt, da beide durch ein thermisches Relais geführt werden. Somit schützt das thermische Relais den Motor sowohl vor Überlastung als auch vor Kurzschlüssen.
Die Startwicklung wird von den Anschlüssen C 1 und C 2 durch die Leitung C 2 -P 1, Kontakte gespeist ein Fliehkraftschalter VTS, VTS-RT Rangierkontakte das Thermorelais der RT. Wenn der Motor startet, wenn der Rotor eine Geschwindigkeit von 70-80% der Nenndrehzahl erreicht, öffnen sich die Kontakte des Fliehkraftschalters und die Startwicklung wird vom Netz getrennt. Wenn der Motor, wenn die Rotordrehzahl sinkt, wird der Fliehkraftschalter Kontakt wieder geschlossen und startet Wicklung für den nächsten Start vorbereitet werden.
In Abb. 3-18 zeigt den Aufbau des Motors Induktions ABE Diese Motoren in dem Netzwerk enthalten sind, ständig aktivierten Hilfswicklung in der Schaltung, die sequentiell geschalteten Kondensator (Fig. 3-9), AVE-Typ-Motoren haben nicht den starren Körper und somit sind sie eingebettet genannt. Mit dem Antriebsmechanismus werden die Motoren mit einem Flansch oder einer Halterung befestigt.
Das Gehäuse des Elektromotors ist eine Packung des Statorkerns 1, die aus Blechen aus 0,5 mm dickem Elektroblech zusammengesetzt ist. Die Verpackung wird mit einer Aluminiumlegierung gepresst und unter Druck gesetzt. An den Enden des Stators befinden sich Druckringe 5 und vier Aluminiumstäbe, die sie zusammenziehen. Die Spulen 6 der Arbeits- und Hilfswicklung sind in die Statornuten eingebettet. Auf den Druckringen 5 sind die Lagerschilde 4 und 7. Durch die Gummimanschette 9 im Lagerschild werden die Enden der Wicklungen 8 für ihr Abenteuer zum Netz gebracht. Lagerschilde sind mit vier Stehbolzen festgezogen.
Der Rotor des Elektromotors ist aus Elektroblechen aufgebaut und mit Aluminium 2 ummantelt. Neben der Wicklung des Rotors sind die Lüfterflügel zur Kühlung des Elektromotors vergossen. Der Rotor dreht sich in zwei Kugellagern 3.
Elektromotoren haben alphanumerische und numerische Bezeichnungen, zum Beispiel wird der Elektromotor ABE 041-2 wie folgt entschlüsselt: A - asynchron, - eingebettet, E - einphasig,
4 - Nummer der Hülle, 1 - Seriennummer der Länge des Statorkerns und die Nummer 2 durch den Strich - die Anzahl der Pole.
3-8. SYNCHRONE EINPHASIGE ELEKTROMOTOREN
In einigen Fällen werden Elektromotoren benötigt, deren Geschwindigkeit unabhängig von der Last streng konstant sein muss. Als solche werden Synchronmotoren verwendet, bei denen die Rotationsgeschwindigkeit des Rotors immer gleich der Frequenz der Rotation des Magnetfeldes ist und aus (3-2) bestimmt wird. Es gibt viele Arten von Synchronmotoren sowohl für einen Dreiphasen- als auch für einen Einphasenstrom. Hier betrachten wir nur zwei der einfachsten Arten von Einphasen-Synchronmotoren: Blind- und Kondensator-reaktiv.

In Abb. Fig. 3-19 zeigt ein schematisches Diagramm des einfachsten einphasigen reaktiven Motors, der in der Technik bekannt ist und das La Cura-Rad genannt wird. Stator 1 und Rotor 2 sind aus extrudierten Elektroblechen zusammengesetzt. Eine Spule, die aus einem einphasigen Wechselstromnetz gespeist wird, wird auf den Stator gewickelt, wodurch ein pulsierendes Magnetfeld erzeugt wird. Der Name des Strahltriebwerks liegt daran, dass der Rotor aufgrund der Reaktionen zweier magnetischer Anziehungskräfte rotiert.
Bei einem pulsierenden Feld hat der Motor kein Anlaufmoment und muss von Hand aufgedreht werden. Die magnetischen Kräfte, die auf die Zähne des Rotors einwirken, neigen immer dazu, ihn gegen die Pole des Stators anzuordnen, da in dieser Position der Widerstand gegen den magnetischen Fluß minimal ist. Der Rotor passiert jedoch durch die Trägheit diese Position während der Zeit, wenn das pulsierende Feld abnimmt. Mit dem nächsten Anstieg des Magnetfeldes wirken die magnetischen Kräfte auf den anderen Zahn des Rotors und seine Rotation wird fortgesetzt. Für die Stabilität des Hubes muss der Rotor des reaktiven Motors eine große Trägheit aufweisen.
Reaktive Motoren arbeiten stabil nur bei einer niedrigen Geschwindigkeit von etwa 100-200 U / min. Ihre Leistung übersteigt normalerweise 10-15 Watt nicht. Rotordrehzahl von der Netzfrequenz f bestimmt wird, und der Anzahl der Rotorzähne Z. Da eine einzelne Halbwelle Änderungen des magnetischen Flusses auf dem Rotor gedreht wird 1 / Z Umsatz pro 1 Minute, enthaltend 2 f 60 Halbzyklen wird es rotieren 60 2 f / Z Umdrehungen . Bei einer Wechselstromfrequenz von 50 Hz beträgt die Rotordrehzahl:
![]()
Um das Drehmoment zu erhöhen, erhöhen Sie die Anzahl der Zähne am Stator. Die größte Wirkung kann erzielt werden, indem so viele Zähne am Stator wie am Rotor angebracht werden. In diesem Fall wirkt die magnetische Anziehung nicht auf ein Paar Zähne, sondern auf alle Zähne des Rotors, und das Drehmoment wird signifikant ansteigen. Bei solchen Motoren besteht die Statorwicklung aus kleinen Spulen, die zwischen den Zähnen um den Statorrand gewickelt sind. Bei elektrischen Schreibern alter Bauart wurde ein Elektromotor mit 77 Zähnen am Stator und am Rotor verwendet, der eine Scheibendrehzahl von 78 U / min sicherstellte. Der Rotor war einer mit der Scheibe, auf der die Platte lag. Um den Elektromotor zu starten, war es notwendig, die Scheibe mit dem Finger zu drücken.
Der Stator des Synchronkondensatorstrahlmotors unterscheidet sich nicht von dem Stator des Kondensator-Asynchronelektromotors. Der Rotor des Elektromotors kann aus dem Rotor eines asynchronen Elektromotors hergestellt werden, indem Nuten in Bezug auf die Anzahl der Pole profiliert werden (Abbildungen 3-20). Gleichzeitig sind die Stäbe des Eichhörnchenkäfigs teilweise abgeschnitten. Bei der Herstellung solcher Elektromotoren mit Rotorblechen, die mit Polvorsprüngen gestanzt sind, spielen einige der Käfigläuferstangen die Rolle einer Startwicklung. Der Rotor beginnt sich wie der Rotor eines asynchronen Elektromotors zu drehen, dann zieht er sich synchron zum Magnetfeld zurück und dreht sich dann mit einer synchronen Frequenz.
Die Qualität des Betriebs des Kondensatormotors hängt stark von der Betriebsart ab, in der der Elektromotor ein kreisförmiges Drehfeld aufweist. Die Elliptizität des Feldes im synchronen Modus führt zu einem Anstieg von Rauschen, Vibrationen und Störung der Gleichförmigkeit der Rotation. Wenn ein kreisförmiges Drehfeld in einem asynchronen Modus auftritt, hat der Motor ein gutes Startdrehmoment, aber kleine Momente des Eintritts und des Austritts aus dem Synchronismus. Wenn das kreisförmige Feld zu höheren Frequenzen hin verschoben wird, nimmt das Startdrehmoment ab, und die Eintritts- und Austrittszeiten der Synchronität nehmen zu. Die grßten Momente des Eintritts und des Austritts aus dem Synchronismus werden in dem Fall erhalten, wenn das kreisförmige Drehfeld im synchronen Modus stattfindet. In diesem Fall wird jedoch das Startdrehmoment stark reduziert. Um es zu erhöhen, wird der Widerstand der kurzgeschlossenen Wicklung des Rotors gewöhnlich etwas erhöht.

Ein Nachteil einiger Arten von Kondensator-Reaktivmotoren ist das Festkleben des Rotors, das darin besteht, dass sich der Rotor während des Startens nicht dreht, sondern in jeder Position stoppt.
Typischerweise zeigt sich das Anhaften des Rotors in Motoren mit einer nicht erfolgreichen Beziehung zwischen den Abmessungen der Vertiefungen und den Polvorsprüngen. Das größte Reaktionsdrehmoment auf einem niedrigen elektrischen Energieverbrauch erhalten wird, wenn das Verhältnis der Polbogen b n die Polteilung ungefähr 0,5-0,6 m, und die Tiefe der Vertiefungen h bei 9-10-fachen des Luftspalt zwischen den Polvorsprüngen und dem Stator ist.
Eine positive Eigenschaft von Kondensator-reaktiven Motoren ist ein hoher Leistungsfaktor, der signifikant höher ist als der von dreiphasigen Elektromotoren und manchmal 0,9-0,95 erreicht. Dies liegt daran, dass die Induktivität des Kondensatormotors durch die Kapazität des Kondensators weitgehend kompensiert wird.
Synchronstrahlmotoren sind die gebräuchlichsten Synchronmotoren aufgrund der Einfachheit der Konstruktion, der geringen Kosten und der Abwesenheit von Schleifkontakten. Sie fanden Anwendung in den Systemen der synchronen Kommunikation, in Installationen von Tonkino, Tonaufnahmen und Fernsehen.
3-9. Verwendung von dreiphasigen asynchronen elektrischen Motoren als einphasig
In der Praxis gibt es Fälle, in denen ein dreiphasiger Elektromotor an ein einphasiges Netz angeschlossen werden muss. Zuvor wurde geglaubt, dass dies das Zurückspulen des Stators des Elektromotors erfordert. Gegenwärtig sind viele Schemata zum Schalten von dreiphasigen elektrischen Motoren in ein einphasiges Netzwerk entwickelt und in der Praxis ohne irgendwelche Änderungen in den Statorwicklungen getestet worden.

Kondensatoren werden als Startelemente verwendet.
Die Schlussfolgerungen der Statorwicklung eines dreiphasigen Elektromotors haben die folgenden Bezeichnungen: C1 - der Beginn der ersten Phase; C2 ist der Beginn der zweiten Phase; СЗ-Beginn der dritten Phase; C4 - das Ende der ersten Phase; C5 - das Ende der zweiten Phase; C6 ist das Ende der dritten Phase. Diese Bezeichnungen sind auf Metallanhängern an den Anschlussdrähten der Wicklung aufgeprägt.
Die Wicklung eines dreiphasigen Elektromotors kann mit einem Stern (Abbildung 3-21, a) oder mit einem Dreieck (Abbildung 3-21, b) verbunden werden. Beim Verbinden mit einem Stern sind die Anfangs- oder Endpunkte aller drei Phasen mit einem Punkt verbunden und die verbleibenden drei Anschlüsse sind mit einem Dreiphasen-Netzwerk verbunden. Verbinden Sie in einem Dreieck das Ende der ersten Phase mit dem Anfang der zweiten, das Ende der zweiten mit dem Anfang der dritten und das Ende der dritten mit dem Anfang der ersten. Aus den Anschlussstellen ergeben sich die Schlussfolgerungen für den Anschluss des Motors an das Drehstromnetz.
Das Dreiphasensystem unterscheidet zwischen Phasen- und Linearspannungen und -strömen. Wenn Sie einem Stern zwischen ihnen beitreten, gelten folgende Beziehungen:
wenn man einem Dreieck beitritt
Die meisten Drehstrommotoren werden für zwei Netzspannungen, beispielsweise 127/220 V oder 220/380 V, hergestellt. Bei einer niedrigeren Netzspannung ist die Wicklung mit einem Dreieck und bei einer höheren Spannung mit einem Stern verbunden. Bei solchen Elektromotoren auf der Tafel: alle sechs herausführenden Leiter der Wicklung leiten ab.

Es gibt jedoch Elektromotoren pro Netzspannung, bei denen die Wicklung innerhalb des Elektromotors mit einem Stern oder einem Dreieck verbunden ist und nur drei Leiter mit der Klemmleiste verbunden sind. Natürlich wäre es in diesem Fall möglich, den Elektromotor zu demontieren, die verketteten Verbindungen zu trennen und drei zusätzliche Ausgänge herzustellen. Dies kann jedoch nicht durch Verwendung einer der Schaltungen des Motors in einem einphasigen Netzwerk erreicht werden, die nachstehend angegeben sind.
Eine schematische Darstellung des Anschlusses eines dreiphasigen Elektromotors mit sechs Zuleitungen an ein einphasiges Netz ist in Abb. 3-22, a. Zu diesem Zweck sind die zwei Phasen in Reihe geschaltet und an ein einphasiges Netzwerk angeschlossen, und die dritte Phase ist mit ihnen parallel verbunden, einschließlich des Startelements 1 mit Schalter 2. Das Startelement kann ein aktiver Widerstand oder ein Kondensator sein. In diesem Fall belegt die Arbeitswicklung 2/3 der Statornuten und der Start 1/3. Somit liefert die Dreiphasenwicklung das erforderliche Verhältnis der Schlitze zwischen den Arbeits- und Startwicklungen. Bei dieser Verbindung beträgt der Winkel zwischen Arbeits- und Anlaufwicklung 90 ° el. (Abbildung 3-22, b).
Wenn zwei Phasen in Reihe geschaltet werden, muss sichergestellt werden, dass sie in Übereinstimmung mit und nicht umgekehrt enthalten sind, wenn n. mit. Verbundene Phasen werden subtrahiert. Wie aus der Schaltung in Abb. 3-22, a, sind die Enden der zweiten und dritten Phase C5 und C6 mit einem gemeinsamen Punkt verbunden.
Es ist möglich, einen dreiphasigen Elektromotor und einen Kondensator gemäß der Schaltung in Fig. 2 zu verwenden. 3-23 mit einem Betriebskondensator 1 oder mit einem Arbeitskondensator 1 und einem Startkondensator 2. Mit diesem Schaltkreis wird die Kapazität des Arbeitskondensators μF durch die Formel bestimmt:
wo I ist der Nennstrom des Motors, A; U ist die Netzspannung, V.
Ein dreiphasiger Elektromotor mit drei Anschlüssen und einer Statorwicklung, die mit einem Stern verbunden ist, ist an ein einphasiges Netz angeschlossen, wie in Fig. 3 gezeigt. 3-24. In diesem Fall wird die Kapazität des Arbeitskondensators durch die Formel bestimmt
Die Kondensatorspannung U 1 = 1,3 U.
Ein dreiphasiger Elektromotor mit drei Anschlüssen und einer Statorwicklung, die in einem Dreieck verbunden sind, ist mit einem einphasigen Netzwerk verbunden, wie in Fig. 3 gezeigt. 3-25. Die Kapazität des Arbeitskondensators wird durch die Formel bestimmt
Die Kondensatorspannung U = 1,15 V.
In allen drei Fällen kann die Kapazität der Startkondensatoren näherungsweise aus der Beziehung bestimmt werden
![]()
Bei der Auswahl des Schaltplans sollten die Spannung, auf die der Drehstrommotor ausgelegt ist, und die Spannung des einphasigen Netzes geführt werden. Die Phasenspannung der dreiphasigen

Ein Beispiel.Ein dreiphasiger Elektromotor mit einer Leistung von 250 W, einer Spannung von 127/220 V mit einem Nennstrom von 2 / 1,15 A sollte in einem einphasigen Netz mit einer Spannung von 220 V enthalten sein.
Bei Verwendung der Schaltung in Abb. 3-24 Kapazität des Arbeitskondensators:
![]()
spannung am Kondensator U 1 = 1,3 220 = 286 V.
Kondensatorkapazität starten
Wenn ein dreiphasiger Elektromotor als einphasige Leistung verwendet wird, wird er als einphasiger Kondensator auf 50% reduziert - bis zu 70% der Nennleistung eines dreiphasigen Elektromotors.
N.V. Vinogradov, Yu. N. Winogradow
Wie man einen Elektromotor berechnet und macht
Moskau 1974