Bolalar uchun antipiretiklar pediatr tomonidan belgilanadi. Biroq, bolaga dori darhol berilishi kerak bo'lgan isitma uchun favqulodda yordam ko'rsatish hollari mavjud. Keyin ota-onalar mas'uliyat olib, antipiretik preparatlarni qo'llashadi. Chaqaloqlarga nima berish mumkin? Qanday qilib kattaroq bolalardagi haroratni pasaytira olasiz? Qaysi dorilar eng xavfsiz?
Elektr chizig'ini loyihalashda mexanik mexanik xususiyatlar ishlab chiqarish mexanizmining mexanik xususiyatlariga mos keladigan tarzda tanlanishi kerak. Mexanik xarakteristikalar o'zgaruvchan rejimlarning barqaror rejimlarda o'zaro bog'liqligini ta'minlaydi.
Mexanizmning mexanik xarakteristikasi burchak tezlik va mexanizmning qarshilik harakati o'rtasidagi munosabatni, ya'ni motor miliga tushiriladi) ō = f (mk).
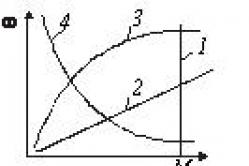
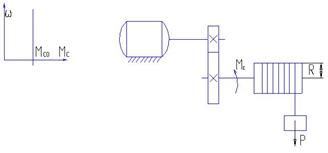
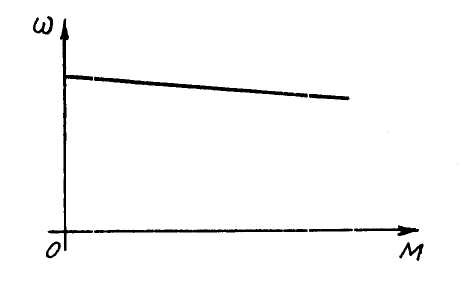
Shakl. Mexanizmlarning mexanik xususiyatlari
Turlarning ichida mexanizmlarning mexanik xususiyatlarining bir nechta o'ziga xos turlari mavjud:
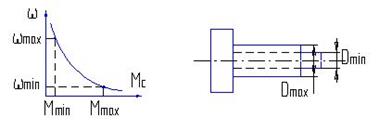
1. Tezlikka bog'liq bo'lmagan qarshilik harakati bilan xos (1-rasmda to'g'ri chiziq 1). Tezlik-mustaqil mexanik xarakteristikasi, bu holda vertikal aylanish o'qiga parallel ravishda tekis chiziq bilan tasvirlangan. Bunday xarakteristikalar, masalan, doimiy ko'tarish balandligi va hokazo. Bilan ko'tarilgan kranlarni, vagonlarni, pistonli nasoslarni o'z ichiga oladi.
qarshilik Turk 2. Characterisation tezligi (shakl 2-yo'nalish. 1) doğrusal bog'liq. Bu qaramlik, masalan, mustaqil yuk tashish bilan bevosita oqim generatorining haydovchisiga xos bo'lib, doimiy yuk ostida ishlaydi.
3. Momentning chiziqli bo'lmagan o'sishiga xos xususiyat (3-rasmda egri 3). Tipik misollar fanatlarning xususiyatlari, markazlashtirilgan nasoslar, pervanellardir. Ushbu mexanizmlar uchun MK burchak tezlikining kvadratiga bog'liqω
. Bu so'zda. parabolik (fan) mexanik xarakteristikasi.
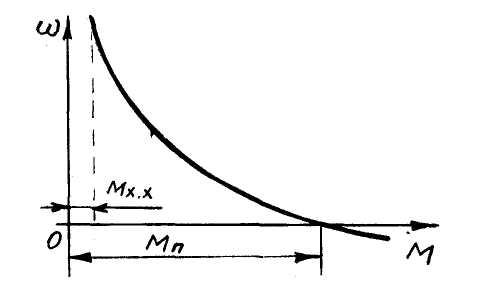
4. Qarshilikning chiziqli bo'lmagan pasayishi bilan xarakterli (4-rasmda 4-chiziq). Bu erda qarshilik harakati aylanish tezligiga teskari proportsionaldir. Bu holda mexanizm mexanizmning barcha ish tezligi oralig'ida sobit turadi. Misol uchun, ba'zi bir metall kesish mashinalarining (torna, frezeleme, zerikarli) asosiy harakat mexanizmlarida Mn moment bilan teskari ravishda o'zgaradi va mexanizm tomonidan iste'mol qilinadigan quvvat sobit turadi.
Elektr motorining mexanik xususiyatlari lahzani Haydash - Bu qat'i nazar, aylanish yo'nalishi Dvigatel mil moment M ijobiy deb tushunish kerak moment ω d = f (M) .Bu uning burchak tezligi qaramligini chaqirdi. Shu bilan birga, qarshilik harakati momaqaldiroq vaqtida salbiy belgilar mavjud.
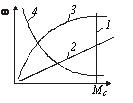
Shakl. 2 mexanik xususiyatlarini ko'rsatadi: 1 - sinxron vosita; 2 - mustaqil bevosita akkumulyator; 3 - ketma-ket ekskluzivlikdagi shahar mexanizmi.
![]()
Shakl. 2. Elektr motorlarining mexanik xususiyatlari
Elektr chizig'ining mexanik xususiyatlarining xususiyatlarini baholash uchun xarakteristikaning qat'iyligi tushunchasi qo'llaniladi. Mexanik xarakteristikaning qat'iyligi ifoda bilan aniqlanadi
b = dM / dō
qaerda d M - vosita momentini o'zgartirish; d ō d burchak tezlikidagi mos keladigan o'zgarishdir.
Lineer xarakteristikalar uchun b ning qiymati sobit bo'lib qoladi, doğrusal bo'lmaganlar uchun esa operatsion nuqtaga bog'liq.
Ushbu kontseptsiyadan foydalanib, shakl. 2, sifat jihatidan quyidagi kabi baholanishi mumkin: 1 - mutlaq rigid (b = ∞); 2 - qattiq; 3 - yumshoq.
Albatta, qattiq xarakterli - Dvigatel hajmi noldan nominalgacha o'zgarganda vosita tezligi o'zgarmagan holda qoladi. Sinxron motorlar bu xarakterga ega.
Qattiq xarakterli - yuk noldan nominalgacha o'zgarganda, aylanish tezligi bir oz farq qiladi. Ushbu xarakteristikada parallel qo'zg'alishga ega bo'lgan bevosita oqimli motor, shuningdek xarakteristikaning chiziqli qismi hududida indüksiya motori mavjud.
Yumshoq xususiyat - Dvigatelning aylanish tezligi yukning nisbatan kichik o'zgarishi bilan sezilarli darajada farq qiladi. Bunday xarakteristikaga seriyali, aralash yoki parallel uyg'unlikdagi, lekin armatura devorida qo'shimcha qarshilik ko'rsatadigan, shuningdek, rotor deviridagi qarshilik bilan mos kelmaydigan DC vosita egalik qiladi.
Ko'pgina ishlab chiqarish mexanizmlari uchun, sincap kafesli rotorlu asenkron motorlar qattiq mexanik xususiyatlarga ega.
Elektr motorlarining barcha mexanik xususiyatlari tabiiy va sun'iy ravishda bo'linadi.
Tabiiy mexanik xususiyat parametrlarning nominal qiymatlari bilan ishlaydigan vosita ishining holatini bildiradi.
Masalan, parallel qo'zg'alishga ega vosita uchun armatura va kuchlanish oqimining nominal qiymatiga ega bo'lgan va armatura devirida qo'shimcha qarshilik mavjud bo'lmagan holatlar uchun tabiiy xarakteristikani yaratish mumkin.
Asenkron motorning tabiiy xarakteristikasi nominal zo'riqish va motorning statoriga etkazilgan muqobil tokning nominal chastotasiga mos keladi, bu holda rotor devirida qo'shimcha qarshilik mavjud emas.
Shunday qilib, har bir dvigatel uchun tabiiy xarakteristikalar faqat bittasi, sun'iy - cheksiz ko'p bo'lishi mumkin. Misol uchun, DC vosita armatura har bir yangi qarshilik qiymati yoki asenkron vosita rotor zanjiri o'z mexanik xususiyatlariga ega.
Dvigatelning statik mexanik xususiyati tezlikni dvigatelning momentiga bog'liqligi deb atagan. w = | (M). Dvigatellarning deyarli barcha turlarida vosita momentining kamayib borayotgan funksiyasi mavjud. Bu sanoatda ishlatiladigan an'anaviy elektr motorlar, ya'ni mustaqil, ketma-ket va aralash qo'zg'almas DC vositalariga, shuningdek asinxron cho'tkasi va kollektorli AC motorlariga taalluqlidir. Biroq, turli motorlar uchun torkning o'zgarishi bilan tezlikni o'zgarish darajasi farq qiladi va " qat'iylik ularning mexanik xususiyatlari.
Chalg'igan mexanik xususiyatlarining mustahkamligi- Elektr dvigatel qurilmasi tomonidan ishlab chiqarilgan moment o'zgarishining nisbati, tezlikni o'zgarishi bilan elektr chiziqning burchak tezliklarida mos keladigan farqga:
![]()
Odatda, ish joylarida dvigatellarning mexanik xarakteristikalari b ning salbiy qat'iyligiga ega<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Mexanik xarakteristikaning geometrik mantiqdagi qat'iyligi mexanik mexanik xususiyatlarning burchidir.
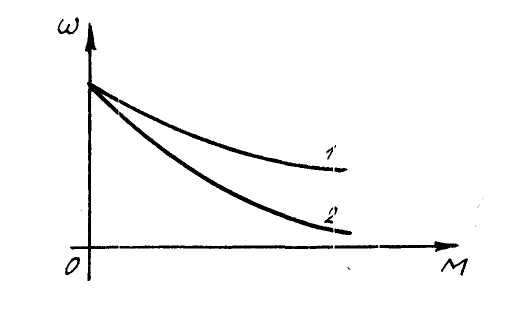
Agar siz 1 va 2 xususiyatlarini solishtirsangiz, xarakteristik 1 yumshoq bo'ladi uning moyilligi kamroq
DM 1\u003e DM 2 Þ b 1\u003e b 2 dan boshlab, va.
Elektr motorlarining mexanik xususiyatlari to'rt asosiy toifaga bo'linishi mumkin:
1. Albatta, qattiq mexanik xarakter (b = ∞) momentning o'zgarishi bilan o'zgarishning o'zgaruvchanligi xarakterlidir. Sinxronlash motorlar bu xarakteristikaga ega (1-rasmda to'g'ri chiziq 1).
2. Qattiq mexanik xususiyat Bu tork o'zgarishining tezligi, ammo u ozayib qolsa-da, xarakterli xususiyatdir. Mexanik xarakteristikaning ish qismidagi mustaqil harakatsiz shahar mexanizmlari, shuningdek asenkron motorlar (1-rasmda 2-rasm) qattiq mexanik xarakteristikaga ega.
Bir indüksiyon vosita uchun, mexanik xarakteristikaning turli nuqtalarida qat'iylik farq qiladi. Mexanik Mk, q va generator Mk, r modalarining maksimal (kritik) qiymatlari o'rtasida indüksiyon motorining xarakteristikasi nisbatan yuqori qat'iylikka ega.
 3. Yumshoq mexanik xususiyat tezlikni moment o'zgarishi bilan sezilarli darajada o'zgarganligi xarakterlidir. Bunday xususiyatlar, xususan, kichik momentlar zonasida (2-rasmda 3-chi egri) seriyali qo'zg'alishning DC-motorlari egallaydi. Ushbu dvigatellar uchun qattiqlik barcha xususiyatlar uchun doimiy bo'lib qolmaydi.
3. Yumshoq mexanik xususiyat tezlikni moment o'zgarishi bilan sezilarli darajada o'zgarganligi xarakterlidir. Bunday xususiyatlar, xususan, kichik momentlar zonasida (2-rasmda 3-chi egri) seriyali qo'zg'alishning DC-motorlari egallaydi. Ushbu dvigatellar uchun qattiqlik barcha xususiyatlar uchun doimiy bo'lib qolmaydi.
Mexanik xarakteristikaning qattiqligining qiymatiga qarab, aralash va tashkillashtirishning shahar motorlari ikkinchi yoki uchinchi guruhga berilishi mumkin.
4. Albatta, yumshoq mexanik xarakter (B = 0) motorning burchak tezligi o'zgarmasligi xarakteristikasi. Bunday xususiyatlar, masalan, oqim manbalaridan oziqlantirganda yoki armatura oqimini barqarorlashtirish rejimida elektr chalg'igan yopiq tizimlarida ishlaganda mustaqil harakatlanish to'g'ridan-to'g'ri oqim motorlari orqali amalga oshiriladi (2-rasmda 4-chizma).
Ish mashinasining mexanik xususiyatlari Ishlaydigan mashina tezligini qarshilik paytidagi bog'liqlik, u = | (M c) hosil qiladi.
Mexanik xarakteristikalar elektr haydovchi yukini ta'riflaydi.
Odatda yuklarning tasnifi:
1. Qarshilik faolligi M c = konstr
Misol: vinçli vince chalg'igan.
Yuk mexanizmni o'zi faollashtira oladi, shuning uchun uni faol deb atash mumkin. Qurilish uchun avtotormoz qo'yish kerak.
2. rezistent qarshilik harakati m = s = konst (momentning turg'un turdagi yuki)
"Quruq ishqalanish" kabi mexanizmlar uchun odatda.
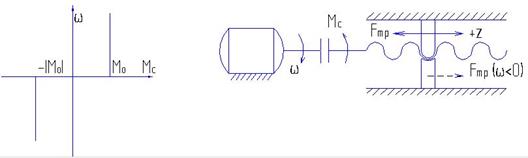
M c = M 0 belgisi (w).
w\u003e 0 M M c\u003e 0; w<0 Þ М с <0.
Reaktiv moment - tezligi w ga reaktsiya.
3. Viskoz ishqalanish
M c = a BT ō
Qarshilik harakati tezligi proportsionaldir.
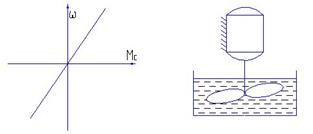
bw - yopishqoq ishqalanish koeffitsienti.
4. Ventilyatsiya momenti
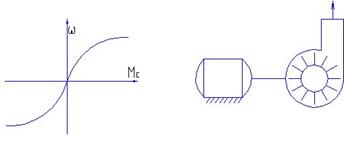
M c = kw 2 belgisi (w).
Santrifüj fanatlar va pompalar uchun odatda.
Kirish yopiq bo'lsa, yuk torku kamayadi.
P = M c w kuchdir.
Ruxsat etilgan kuch P = konst
Qaerda R c = const.
Tez-tez ishlatiladigan dastgohlar (tornalama, frezeleme, burg'ulash, silliqlash va boshqa mashinalar) uchun ishlatiladi.
w max ∙ M min = w min ∙ M max = konst.
Keling, o'ylaymiz:
w = const, F = poydevor.

Planer uchun:
R 1 = v min ∙ F maksimal ish zarbasi, R 1 = v maks. ∙ F min - Bo'ston.
P 1 »P 2 = konst.
Dvigatel tanlash xususiyatlari:
R 1 = 5 kVtda R dv = 5 ∙ 100 = 500 kV ga teng bo'ladi.
Motorni chegara qiymatlaridan to'g'ridan-to'g'ri tanlab olish D w vaqtida o'rnatilgan dvigatelning kuchini oshiradi, bu erda tezlikni nazorat qilish diapazoni. Darhaqiqat, tezlikni boshqarish oralig'ini tanlash bilan dvigatel kuchi qisqartirilishi mumkin.
DFT uchun HB qo'zg'alish oqimlari uchun tezlikni nazorat qiladi.
Dvigatelning mexanik xususiyatlari aylanish tezligining qaramligini deb atadi rotor n = f (M2) chizig'idagi momentdan boshlab. Yuk ostida bo'lganligi sababli bo'sh turgan tork kichik, undan keyin M2 ≈ M va mexanik xarakteristikasi n = f (M) ga bog'liqdir. Agar s = (n1 - n) / n1 o'zaro bog'liqligini hisobga oladigan bo'lsak, mexanik xarakteristikaning grafik va qarama-qarshiligini N va M koordinatalarida ko'rsatish orqali erishish mumkin (2-rasm).
Shakl. 1. Asynchronous vosita mexanik xarakteristikasi
Indüksiyon motorining tabiiy mexanik xususiyatlari uning kiritilishining asosiy (pasport) sxemasi va besleme quvvati nominal ko'rsatkichlariga mos keladi. Sun'iy xususiyatlarhar qanday qo'shimcha elementlar kiritilgan taqdirda olinadi: qarshilik , reaktorlar , kondansatörler . Motor nominal bo'lmagan kuchlanish bilan ishlaganda, bu xususiyatlar tabiiy mexanik xususiyatlardan farq qiladi.
Mexanik xarakteristikalar elektr qurilmaning statik va dinamik usullarini tahlil qilish uchun juda qulay va foydali vositadir.
Mexanik xususiyatlarning asosiy nuqtalari: kritik qaymoq va chastota, maksimal moment, dastlabki moment, nominal moment.
Mexanik xarakteristika - bu Turkning kaymalarga yoki boshqa aytganda aylanishlarning soni bo'yicha bog'liqligi:
![]()
Ifodadan 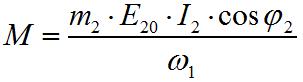 bu qaramlik juda murakkab ekanligi ko'rinadi, chunki formulalar ko'rinishida)
bu qaramlik juda murakkab ekanligi ko'rinadi, chunki formulalar ko'rinishida)  va
va  , slip ham ifodalarga kiradi Men 2
va cos? 2. Asenkron motorning mexanik xususiyati odatda grafik jihatdan berilgan
, slip ham ifodalarga kiradi Men 2
va cos? 2. Asenkron motorning mexanik xususiyati odatda grafik jihatdan berilgan
Xarakteristikaning boshlanish nuqtasi mos keladi n = 0 va b = 1: bu mexanizmi ishga tushirishning dastlabki paytidir. Boshlang moment M n - Dvigatelning operatsion xususiyatlarining juda muhim xususiyati. Agar M n kichik, nominal ish momentidan pastroq bo'lsa, dvigatel faqat ishlamay qolishi yoki mos ravishda kamaytirilgan mexanik yuk bilan ishlay boshlaydi.
Tasavvur qiling M np Mexanik ishlaydigan milga mexanik yuk tomonidan yaratilgan (tormozlanish) moment. Dvigatelni ishga tushirish ehtimoli aniq: M n > M np . Agar bu shart bajarilsa, vosita rotori harakatlanadigan aylana miqdori o'zgaradi n ko'tariladi va toyadi b kamaytirish. Yuqoridagi tasvirdan ko'rinib turganidek, vosita momenti ortadi M n maksimal darajada M m , kritik slipga mos keladi b kp, shuning uchun momentlarning farqi bilan aniqlangan vosita kuchining ortiqcha bo'lishi M va M np .
Mavjud motor torku orasidagi farq (operatsiya xarakteristikasida ma'lum bir slip bilan bo'lishi mumkin) M va qarshi M np , vositani ishga tushirish rejimi va vosita tez aylanish tezligiga etadi.
Mexanik xarakteristikaga ko'ra, muayyan miqdordagi inqiloblar (at b = b kp) vosita mavjud torki berilgan dvigatel uchun maksimal mumkin (ma'lum voltajda U ) qiymatlari M t . Bundan tashqari, vosita aylanish tezligini oshirishda davom etadi, ammo mavjud moment tezlik bilan kamayadi. Ba'zi qadriyatlarda n va b vosita momenti qarshi torka teng bo'ladi: mexanizmi ishga tushirilganda uning tezligi nisbati mos keladigan qiymatga o'rnatiladi:
![]()
Ushbu nisbat mexanizmning barcha yuk sharoitlari, ya'ni barcha qiymatlar uchun majburiydir M np maksimal vosita momentidan oshmasligi kerak M t . Ushbu chegaralar ichida vosita avtomatik ravishda barcha yuklarni almashtirishga moslashadi: agar mexanik ish paytida uning mexanik yuki oshsa, M np vosita tomonidan ishlab chiqilgan vaqtdan ko'proq bo'ladi. Dvigatelning tezligi pasayishi boshlanadi, va moment tezlashadi.
Aylanish tezligi tenglikka muvofiq yangi bosqichda o'rnatiladi M va M np . Yuk tushganda, yangi yuk rejimiga o'tish jarayoni tiklanadi.
Agar yuk torku M np oshadi M t , vosita zudlik bilan to'xtaydi, vosita tezligida keyingi pasayishi bilan birga, vosita torku kamayadi.
Shuning uchun maksimal vosita torku M t shuningdek, burilish yoki tanqidiy moment deb ataladi.
Agar hozirda formula ![]() o'rniga:
o'rniga:
unda biz:
Birinchi lotinni olish M va uni nolga tenglashtirsak, torkning maksimal qiymati quyidagicha kelib chiqadi:
ya'ni, bu slayd bilan b = s kp , Rotorning faol qarshiligi induktiv qarshilikka teng
![]()
Qadriyatlar s kp Asenkron motorlarning ko'pchiligi 10-25% oralig'ida joylashgan.
Agar faol qarshilik o'rniga ondagi yuqoridagi formulada r 2 induktivni formulalar bilan almashtiring
![]()
Maksimal moment asenkron vosita magnit oqining kvadratiga (va shuning uchun kuchlanishning kvadratiga) mutanosib, rotorning sarg'ishining tarqalish indüktansına qarshi mutanosib ravishda orantılıdır.
Dvigatelga tatbiq etilgan kuchlanish doimiy bo'lsa, uning oqimi F deyarli o'zgarishsiz qolmoqda.
Rotor zanjirining tarqalish indüktenti ham deyarli o'zgarmaydi. Shuning uchun, rotor pallasida faol qarshilik o'zgarganda, Turkning maksimal qiymati M t U o'zgarmaydi, lekin turli xil slippalar (rotorning faol qarshiligi ortishi bilan - katta slip qiymatlari uchun) keladi.
Shubhasiz, dvigatelning maksimal yuki qiymati bilan belgilanadi M t . Dvigatelning ishlaydigan qismi tor doiradagi tezlikda bo'ladi n, mos keladigan M t qadar. Qachon n = n 1 (xarakteristikaning so'nggi nuqtasi) M = 0, chunki sinxron rotor tezligida b = 0 va I 2 = 0.
Motorning nominal kuchini aniqlovchi nominal moment odatda 0,4-0,6 ga teng bo'ladi M t . Shunday qilib, asinxron motorlar qisqa muddatli 2-2,5 marta yuklashga imkon beradi.
asenkron mexanizmi ishlashini xarakterlovchi asosiy parametr s ingrash - rotor tezligi n va dala n o'rtasidagi o'zaro farq: (- n n o) / n O s =.
0 ≤ s ≤ 1 ga mos keladigan mexanik xarakteristikaning maydoni motorlar rejimining hududi, b< s кр работа двигателя устойчива, при s > CR ning beqarorligi. S uchun< 0 и s > 1 vosita momenti uning rotorining aylanish yo'nalishiga qarshi yo'naltiriladi (mos ravishda regenerativ tormozlash va qarama-qarshi frenleme).
Dvigatelning mexanik xususiyatlarining barqaror qismi odatda ta'riflanadi kloss formula , U ichiga nominal rejim parametrlarini o'rniga qo'yib, tanqidiy slipni aniqlash mumkin:
 ,
,
bu erda: L = M kp / M n - dvigatelning ortiqcha yuk hajmi.
Katalog yoki katalog ma'lumotlariga ko'ra mexanik xususiyatlar taxminan to'rtta nuqtada yaratilishi mumkin (7.1-rasm):
Point 1 - ideal orqali bandlik, n = n o = 60 f / p, M = 0,: p - avtomobil sohasidagi magnit qutb juft soni;
Point 2 - nominal, rejimi: n = n n, M = 9550 n = P n / n n qaerda P n - kVt nominal motor quvvati;
3-nuqta - muhim rejim: n = n cr, M = M cr = l M n;
4-nuqta - boshlash rejimi: n = 0, M = M start = b M N.
M N Dvigatel operatsion yuk qator tahlil va bir oz ko'proq barqaror qismi mexanik xususiyatlari taxminan to'g'ri chiziq tenglamasi n = 0 n tomonidan tasvirlangan mumkin bo'lsa - M yilda koeffitsienti "a" osonlik tezligini n N va M N baholadi tenglama parametrlari kirib o'rnini bosuvchi tomonidan belgilanadi.
Statorning sarg'ish dizayni. Bir qatlamli va ikki qatlamli lentli sariq.
Sariq dizayni bo'yicha sarımlar yumshoq bobinlarga bo'linadi va rulonli va rulonli rulonli bobinlar mavjud. Yumshoq rulolar yumaloq izolyatsiya qilingan teldan tayyorlanadi. qolip bo'yicha oldindan jarohat istalgan shaklga bermoq va keyin izolyatsiya qilingan trapezoidal truba joylashtirildi uchun (qarang. sek. 3,4, ichida, gva 3,5, ichida); sarg'ish jarayonida bosqichma-bosqich izolyatsion qistirmalar o'rnatiladi. So'ngra takozlar yoki panellari orqali uyalariga yilda mustahkamlash halqa, o'rash va uning İmpregnasyon Banding amalga oshiriladi, ularga (frontal qismini tashkil) yakuniy shaklga bering. V-tipli sariqlarni tayyorlashning butun jarayoni to'liq mexanizatsiyalashtirilishi mumkin.
Qattiq qatlamlar (yarim-sariq) to'rtburchak izolyatsiyalangan simlardan yasalgan. Yakuniy shakli quyishdan oldin ularga beriladi; bir vaqtning o'zida ular tanaga va bosqichma-bosqich izolyatsiyaga qo'shiladi. So'ngra, rulonlarni oldindan izolyatsiya qilingan ochiq yoki yarim ochiq oluklarga qo'yishadi , mustahkamlash va shavqsizlik.
1. Bir qavatli sariq - Bu holatda, chunki, mexanizatsiyalashgan uzatishning uchun, ayniqsa, munosib, konsentrik va ikki tomon ham bir vaqtning o'zida stator bobinler uyalariga joylashtirilgan bo'lishi kerak o'rash. Biroq, ulardan foydalanish oldingi qismlarning sezilarli uzunligi tufayli sariq simni ortib borishiga olib keladi. Bundan tashqari, bunday simlarning havo teshikka shakli-magnit maydon yomonlashuvi olib keladi qadamlar qisqarishi, qo'shimcha yo'qotishlar ortishi, mexanik xususiyatlari uzilishlarning yuzaga amalga va shovqin bilan oshirish mumkin emas. Biroq, uning soddaligi va bunday o'tkazish ucuzluğu tufayli keng kuch-quvvati kam asinxron 10-15 kVt ishlatiladi.
2. Ikki qavatli sariq ranglar- shunday qilib doka tomonidan ishlab chiqarilgan magnit maydon shaklini yaxshilash, tish bo'linmalari, har qanday miqdordagi o'rash maydonni qisqartirish amalga, va EMF egri oliy Harmonisinden bostiradi mumkin. Bundan tashqari, er-xotin qavatli sariq choklar bilan oldingi frontal birikmalarning oddiy shakli olinadi, bu esa o'rash ishlab chiqarishni osonlashtiradi. Bunday sariqlar 100 kVt quvvatga ega dvigatellar uchun qo'lda joylashtirilgan qattiq rulonlarda qo'llaniladi.
Stator sariqlari. Bir qavatli va ikki qavatli to'lqinli sariq
Stator yadroining trubkasida, muqobil oqim tarmog'iga ulangan ko'p fazli sariq bor. Ko'p fazali nosimmetrik sariq tichiga oladi tyulduz yoki poligonga ulanadigan fazalar. Misol uchun, uch fazali stator sargisi holatida, fazalar soni m =3 va sariq yulduz yoki uchburchakka ulanishi mumkin. Bosqichlar orasidagi sariqlik 360 / t deg; Uch fazli sariqlik uchun bu burchak 120 °.
O'zgarishlar sariqlari ketma-ket, parallel yoki ketma-ket parallel ravishda bog'langan alohida boblardan ishlab chiqariladi. Bunday holda, lasanbir xil oluklarda joylashgan va yivning devorlariga nisbatan umumiy izolyatsiyaga ega bo'lgan stator plitasining bir qator ketma-ket ulangan sariqlarini bildiradi. O'z navbatida lasanikki qo'shni qarama-qarshi qutblar ikki uyalariga yilda hasrat va ketma-ket bir-biriga bog'liq, faol (m. E. Stator asosiy ajratish) dirijyor hisoblanadi. Stator yadrosi tashqarisida joylashgan va faol o'tkazgichlarni bir-biriga bog'laydigan o'tkazgichlarga sarg'ishning oldingi qismlari deyiladi. Oluklarga qo'yilgan sarg'ish bobinlarning tekisliklar qismi bobinlarning yoki oluklarning tomonlari deb ataladi.
Statorli yivlar statorning ichki tomonida tish deb ataladi. Stator yadroining ikki ulashgan tish markazlari orasidagi masofa havo bo'shlig'iga qaragan sirtida o'lchangan. tish bo'limiyoki slot bo'limi.
Ko'p qatlamli silindrsimon bobin sariqlari (3-rasm) dumaloq teldan o'raladi va chiziq bo'ylab joylashgan ko'p qatlamli disk bobinlaridan iborat. Sovutish uchun rulon orasiga (har bir rulon orqali yoki ikki yoki uch dumba orqali) radiusli kanallar qo'yish mumkin. Bunday sariqlar yuqori voltaj tomonida ishlatiladi S ≤ 335 kV × A, Men ≤ 45 A va U ltr ≤ 35kV.
Yagona-qatlam va ikki qatlamli tsilindrik halqa (4-shakl) bir yoki parallel to'g'ri burchakli o'tkazgichlar (to'rt gacha) ko'proq jarohat va uchun ishlatiladi S ≤ 200 kV × A, Men ≤ 800 A va U ltr ≤ 6kV.
Dars mazmuni 10
Elektr motorlarining mexanik xususiyatlari
Dars rejasi
1. Tabiiy va sun'iymexanik xususiyatlarielektr motorlar
- Qattiqligicha mexanik xususiyatlari
- Parallel uyg'otishning to'g'ridan-to'g'ri oqimi vositasining tabiiy mexanik xarakteristikasi
- Tabiiy mexanik xususiyat
- Tabiiy
- Sinxron motorning mexanik xarakteristikasi. Kema ustida sinxronlashtiruvchi vositalarning maydoni
dvigateli mexanik xususiyatlari, qat'i nazar, toki qanday vosita mil tezligi ō burchak bog'liqligi elektromagnit avtomobil Turk (bundan buyon matnda ?? Dvigatel), ya'ni qaramlik ω () deyiladi.
Bu erda muhim kuzatuvlarni amalga oshirishimiz kerak: momentlarning tenglamasiga muvofiq, barqaror holatida = motorning elektromagnit momenti muvozanatlashgan statik moment (moment ohm qarshilik) mexanizm. Bu degani vosita elektromagnit momentining kattaligi mexanizmning momentiga to'liq bog'liqdir?? Mexanizmning tormoz momenti qanchalik ko'p bo'lsa, mexanizmning momenti shunchalik katta bo'ladi va aksincha.
Ya'ni, har qanday vosita uchun kirish qiymati mexanizmning momenti va chiqishi?? uning tezligi.
deyarli barcha Motors darajasi Dvigatel Turk kamayish funktsiyasi, ya'ni, moment o'sish darajasi kamayadi [Chill 33] bo'ladi. Biroq, turli elektr motorlar uchun tezlikni o'zgartirish tezligi farq qiladi parametr bilan tavsiflanadi mexanik xususiyatlarning qat'iyligi.
Qattiqlik elektr haydovchi mexanik xususiyatlari β diskda burchak tezliklar orasidagi farq mos turli xil tezlik bilan elektromagnit avtomobil Turk farq nisbati.
b = (M 2 Ì 1) / (ō2 ō1) = D / Dō
Odatda ish joylarida elektr motorlarining mexanik xususiyatlari salbiy qat'iylikka ega b< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Taniqli tabiiy va sun'iymexanik xususiyatlariva elektr motorlar.
Tabiiy mexanik xarakteristikasi? Bu odatdagi olingan ō () ga bog'liqdir vosita ish sharoitlari, ya'ni. nominal parametrlar bo'yicha ta'minot tarmog'i va qo'shimcha qarshilikning yo'qligidvigatellarning sariq zanjirlarida.
Elektr ta'minotining parametrlari: doimiy oqimda? o'zgaruvchan oqim bilan kuchlanish va oqim chastotasi.
Kerakli sharoitlarda olingan xususiyatlar, odatdagidan tashqari, sun'iy deyiladi.
Sun'iy xususiyatlari, masalan tutashuv o'rash tutashuv yoki kirish avtomobil rotor o'rash shahar vosita armatura uchun chidamli, joriy tomonidan, masalan, mexanizmi parametrlarini o'zgartirib, olingan yoki elektr parametrlarini o'zgartirish mumkin o'zgaruvchan tokning kuchlanishi va chastotasi.
Har bir elektr qidiruvi mavjud tabiiy va sun'iy to'siq xususiyatlari. sun'iy xususiyatlari soni shahar vosita Dinamo qornini reostat elektron bog'ichlarida bosqichlarida sonini sozlash, masalan, sozlash a'zosi bosqichlarida soniga bog'liq bo'ladi. Agar shunday bosqichlar vositasi bo'lsa? beshta, unda bu vosita oltita xususiyatga ega? beshta sun'iy va bitta tabiiy.
Sun'iy mexanik xususiyatlar bunday vosita ish rejimlarini tezlikni boshqarish, teskari, elektr tormozlash va boshqalar sifatida olish uchun ishlatiladi.
Tabiiylikni ko'rib chiqaylikth mexanizmlarning mexanik xususiyatlariturli xil turlari.
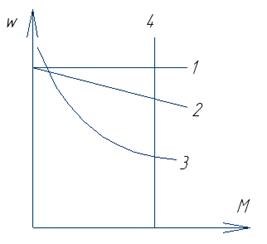
Shakl. 10.1 Sinxron motorning tabiiy mexanik (a) va burchak (b) xususiyatlari; θ stator sargının magnit maydonining o'qidan rotor o'qining qarama-qarshi burchagi
Sinxron motorning tabiiy mexanik xarakteristikasi
Tabiiy mexanikbelgilar sinxron vosita(Rasm 10.1a)? albatta qattiq?? bu shunchaki xarakterlivaqt o'zgarishi bilan tezlik o'zgarmaydi, uning qat'iyligi (b = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C tabilnost sinxron vosita rotor burchak tezlik, () (Fig. 10,1 b) quyidagicha mexanik yuk rotora qo'llaniladigan bo'lsa, rotor o'qi va stator simlarning aylantirib magnit maydon, ya'ni bir xil bir sinxronlash vosita th xususiyatlarini tushuntiradi th = 0 ° (shakl 10.1da nuqta 0). Dvigatelning elektromagnit momenti M = 0 bo'lsa, dvigatel bo'sh ishlaydi.
mexanik yuk avtomobil şaftına tatbiq va uni oshirish bo'lsa, mexanik stress ta'siri ostida rotor stator simlarning magnit maydoni, barcha katta burchagi th davom etadi.
Milga mexanik yuk katta bo'lsa, bu burchakdan qanchalik katta va mexanik aylanadigan elektromagnit moment katta bo'ladi.
Bu momentni bir vaqtning o'zida oshirish vosita, mexanizmning tormoz momentini oshirish natijasida yuzaga keladi faqatgina vosita tezligi barqarorligini ta'minlaydi (10.1 rasmda xarakterli bo'lim = 0 dan = ga teng).
Biroq, vosita tezligi barqarorligi θ ≤ 90 ° burchakka qadar saqlanadi. V = 90 ° da vosita kritik (maksimal) momentni (10.1 a-rasmda A nuqtasini) rivojlantiradi.
Mexanik yuk yana 90% gacha oshirilsa, elektromagnit moment mexanik ravishda kamayadi (burchak xarakteristikasining segmenti), ya'ni, bu moment mexanizmning tormoz momentidan kamroq bo'ladi. Natijada, vosita rotor tezligi pasayadi va oxir-oqibatda rotor to'xtaydi.
Bu holda rotor tezligi stator simlarning aylantirib magnit maydon tezligi kamroq ekan, mexanizmi vaqtda tashlab qildi.
motor burchak xususiyatlaridan quyidagicha, eşzamanlılık holatini avtomobil zarar bo'ladi: θ≤90 °.
Amalda nominal burchak = 20 ... 40 °.
Sinxron motorlar doirasi: kemalarda? elektr motorlari, qaytib vintlardek; qirg'oqda ?? Masalan, gaz nasos stantsiyalaridagi kompressorlar kuchli mexanizmlarni boshqarishda.
Dvigatel mexanikasining tabiiy mexanik xususiyati
Tabiiy dvigatel mexanikasining mexanik xususiyatlariparallel uyg'otish (8.5-rasm).xo'sh, chunki uning qattiqligi
b = D / dō ≤ 10%.
Shakl. 10.2 Tabiiy parallel to'g'ridan-to'g'ri oqim mexanikasining mexanik xarakteristikasi
Bu keng tezligi elektromagnit moment qiymati etarlicha barqaror bo'lsa (masalan, sezilarli darajada o'zgarmaydi), degan ma'noni anglatadi.
Bunday dvigatellari Dvigatel tezligi keng doiradagi mexanizmi yuk keskin o'zgardi kerak emas qaerda qachon ishlatiladi ?? nasoslar, fanatlar va boshqalarni elektrga ulashda foydalaniladi.
Shakl. 10.3 Tabiiy mexanik xarakteristikasito'g'ridan-to'g'ri oqim DC vosita
Tabiiy dvigatelning seriyali qo'zg'alish mexanizmining mexanik xususiyati (Fig. 10.3) ?? yumshoq , chunki uning qat'iyligi
b = A / dō\u003e 10%.
Bu degani, mexanizmi elektromagnit momenti o'zgarib turganda, hatto kichik diapazonda ham uning tezligi sezilarli darajada o'zgaradi.
Bu dvigatelning ikkita xarakteristik xususiyatini eslaylik to'g'ridan-to'g'ri oqim DC vosita:
- Shiling ustidagi mexanik yukning kamayishi yoki uning yo'qligi (=)
vosita tezligi keskin ko'tariladi, dvigatel "sotuvga chiqadi". Shuning uchun, bu vosita milga tushirilmaydi;
- Dastlabki vaqtda vosita boshqa turdagi motorlarga qaraganda boshlang'ich daqiqalarni ko'paytiradi.
Ushbu motorlar, ular mil ustida yuk holda chap va (bo'sh joy trolleybusda qaratib) qaysi yuqori boshlang'ich moment kerak emas, avtomobil, xususan, elektr transport, masalan, sudlarga taalluqli emas, balki sohil ishlatiladi.
Shakl. 10.4 Tabiiy karma qo'zg'alishning DC motorlarining mexanik xususiyatlari: 1 s parallel-ketma-ket keladigan qo'zg'alish;
2-chi ketma-ketlikda parallel uyg'otish
Tabiiy aralash-qo'zg'aladigan dvigatel mexanikasining mexanik xususiyati parallel va ketma-ket motorlarning xususiyatlari bilan oraliq bo'lib, magnit qo'zg'atish oqimi har ikkala sariqning qo'shma ta'siridan hosil bo'ladimi? parallel va ketma-ketlik.
Ikkita aralashma qo'zg'atadigan motor mavjud:
- parallel? qator uyg'onishi Natijada yuzaga kelgan magnit oqi etgan asosiy qismi bir parallel, 70% gacha (qolgan 30% o'rash ishlab chiqaradi ketma-ketlik);
2. navbat bilan parallel qo'zg'alish bo'lib, natijada hosil bo'lgan magnit oqining asosiy qismi bir qator sarg'ish (70% gacha, qolgan 30%parallel.
Shuning uchun, birinchi turdagi mexanizmning mexanik xususiyatlari grafikasi ikkinchi turdagi mexanizmdan ko'ra qattiqroq bo'ladi.
Mexanik xususiyatlari ham?? yumshoq , chunki ularning qattiqligi
b = A / dō\u003e 10%.
Kema ustida, tartibga solinadigan elektr drayvlarda aralash qo'zg'alish motorlari ishlatilganmi? vintlardek, musluklar, shamshaflar va shpiller.
Indüksiyon motorining tabiiy mexanik xususiyatlari
Tabiiy bir indüksiyon motorining mexanik xususiyati ikki qismdan iborat. ishlamaydigan (mustahkamlovchi) AB va ishchi samolyotlarD (rasm 8.8).
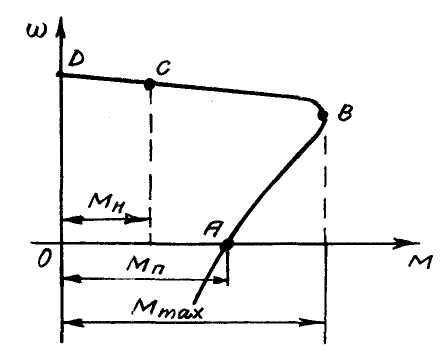
Shakl. 10.5 Tabiiy indüksiya motorining mexanik xususiyatlari
Dastlabki vaqtda vosita dastlabki momentni ishlab chiqadi(segment OA), undan keyin u ABC yo'lining bo'ylab S nuqtasiga tezlashadi. Bunda AB sektsiyasida ham tezlik, ham momentning ortishi B nuqtada vosita maksimal momentni. Samolyot qismida tezligi oshib, nominalga (nuqta S) tushadi. SaytdaBC vosita haddan tashqari yuklangan, t. Ushbu bobning har qanday joyida vositaning elektromagnit momenti nominal momentdan katta (> >).
Oddiy sharoitda, vosita S qismida ishlaydiD , qattiqligi
β = Δ / Δω < 10%.
Bu shuni anglatadiki, tork katta diapazonda o'zgarib turganda, vosita tezligi sezilarli darajada o'zgaradi.
Asenkron motorlar AC elektrostantsiyasi bilan jihozlangan kemalarda eng keng dasturni topdi.
Sanoat, masalan, turli qator kemalar Asenkron motorlar uchun maxsus ishlab chiqaradi, 4A ... OM2 (to'rtinchi qator motorlar), MAP (Marine mos kelmaydigan, polyusopereklyuchaemy), MTF (c rotorlu) va boshqalar.
Shunday qilib, 4A seriyali motorlar? bitta-tez, MAP seriyali? ikki va uch tezlikli MTF seriyali? tezlikni nazorat qilish davri orqali aniqlanadi (5 tezlikka qadar).
Dars berish 7.
2.5. Seriyali qo'zg'alish bilan dvigatelning mexanik xususiyatlari. Motor tartibi
Dvigatelni ishga tushirish sxemasi sek. 2.8. Langar avtomobil M va LM uyg'onishi ketma-ket ulangan doka va shu sababli yagona manbai U. tomonidan armatura oqimi quvvatlanadi Men men ham ogohlantiruvchi oqimdir Men ichida . o'rash armatura bilan bir xil tasavvurlar yasalgan qator uyg'onishi dirijyor bilan LM DPT o'rash qo'zg'alishi: Bu jihat alohida qo'zg'alishi bilan motor izchil qo'zg'alishi bilan Dvigatel dizayn yagona farq belgilaydi.
Shakl. 2.8. Ardışık uyarılma bilan DCT'nin qo'shilishi diagrammasi.
O'zgaruvchan qaytib armatura bilan emf indüklenir. aylanish ^ E. Dvigatel yo'nalishini yoqish sxemasida E yo'nalishga qarshi U, bu vosita ish rejimiga mos keladi. Qiymat E quyidagilarga teng:
Qaerda ?
- mexanik burchak tezligi; F - Dvigatel oqimi;  - Yo'naltiruvchi kitoblarda berilgan hisoblash uchun vosita ma'lumotlarining konstruktiv koeffitsienti. Bu erda s - vosita qutblarining juftlari soni; N - faol armatura o'tkazgich kabellarining soni; a - armatura sargısının parallel shoxlari juftlarining soni.
- Yo'naltiruvchi kitoblarda berilgan hisoblash uchun vosita ma'lumotlarining konstruktiv koeffitsienti. Bu erda s - vosita qutblarining juftlari soni; N - faol armatura o'tkazgich kabellarining soni; a - armatura sargısının parallel shoxlari juftlarining soni.
Anchor oqimi yo'nalishi Men Men , yo'nalish kabi E vosita ish rejimi uchun ulanish diagrammasi ko'rsatilgan.
Dvigatelning assimilyatsiya oqimining ruxsat etilgan qiymati Men men qo'shmoqchiman armatura shartlarini va mexanik dayanım shartlari bilan cheklangan va nominal tokdan oshmasligi kerak Men yang 2,5 martadan ortiq Men men qo'shmoqchiman ? 2.5 I yang .
barqaror mexanizmi ishga da stress muvozanat tenglamasi muvofiq, kuchlanish U, armatura pallasida kuchlanish tomchi bilan muvozanat avtomobil armatura pallasida qo'llaniladigan Men men R. tuxum va armaturalarni o'rab olishda indikatorga ega. aylanish E:
U = I Ya R YTS + E
Qaerda R. QK = R Men + R DP + R KO + R In + R P. - zanjirning umumiy qarshiligi. Bu erda R. Men - armatura qatlamlariga qarshilik; R. DP - qo'shimcha qutbalarni o'rash qarshiligi; R. KO - kompensatsiya sargının qarshiligi; R. In - qo'zg'atuvchi o'rashning qarshiligi; R. P. - boshlang'ich reostatning qarshiligi.
Qiymat Men Men barqaror holatda bo'ladi:
Boshlash rejimida ^ E = 0, shuning uchun sariqlarning kichik qarshiligi, dastlabki oqim tufayli Men Men ruxsat etilgan qiymatdan oshib ketishi mumkin. Ishlash oqimini cheklash uchun qarshilik ko'rsatadigan dastlabki reostat qo'llaniladi R. P. shu tarzda tanlangan Men Men ? Men Men DOPman
muvozanat tenglamasi dan dvigateli mexanik xususiyatlari uchun analitik ifodasini olish mumkin langar zanjirlar uchun keskinliklarni.
Emf o'rniga uni almashtirish. aylanish ^ E uning qiymatini va natijada hosil bo'lgan tenglamani tezlik bilan bog'liq holda hal qilishda vosita tezligining bog'liqligiga erishamiz ? armatura oqimidan Men Men ? = f (I Men ) , elektromexanik xarakterli deyiladi:
Tashviqot o'tkazish mexanizmi vosita armaturasi bilan bir-biriga ulanganligi sababli, u tomonidan ishlab chiqarilgan magnit oqim ^ PH armatura oqimi funksiyasi Men Men . Qaramlik F = f (I Men ) "magnitlanishi" chizig'i deb ataladi va "to'yingan zona" turiga xos bo'lmagan xarakterga ega. Bu egri aniq tahliliy ta'rifi, bir qator uyg'onishi, Poydevor mexanik xususiyatlari, shuning uchun hech qanday aniq tahliliy tavsifi mavjud emas. Agar magnit tizimning to'yinganligini e'tiborsiz qoldiradigan bo'lsak, biz chiziqli munosabatlarga egamiz F va Men Men mutanosiblik koeffitsienti bilan, ya'ni, F =? I Men , u holda moment:
M = kfiI H = k? I H 2
Shunday qilib, armatura tokining qiymati quyidagicha bo'ladi:
Elektromekanik xarakteristikaning tenglamasini almashtirish uchun qiymat Men men mexanik xarakteristikaning tenglamasini qo'lga kiritamiz:
Qaerda A = U / k; B = R QK / (k?) - doimiy qiymatlar.
Olingan tenglamani tahlil qilish ordinat o'qining egri uchun asimptot ekanligini va uning kichik qiymatlari mintaqasida uning katta tikuvchilikka ega ekanligini ko'rsatadi
Qachon R. P. =0 va U = U janob vosita tabiiy xarakteristikada ishlaydi. Tabiiy xarakteristikani yaratish uchun har bir dvigatel seriyasidagi kataloglarda berilgan universal xususiyatlar qo'llaniladi. Ular qaramliklarni anglatadi n = f (I Men ) va M = f (I Men ) nisbatan birliklarda. Dvigatelning nominal ma'lumotlarini bilish mutlaq qiymatlarda uning xarakteristikasini qurish mumkin. Ushbu xarakterli xususiyatlar shakl. 2.9.
Shakl. 2.9. Dvigatelning seriyali qo'zg'alish mexanizmining mexanik xususiyatlari.
Xarakteristikaning o'ziga xos xususiyati qarshilik paytidagi pasayish bilan tezlikning keskin o'sishidir M bilan . Shu sababli, ketma-ket eksklyuziv konturli shahar mexanizmi ishga tusha olmaydi M bilan janob , chunki vosita tezligi ruxsat etilgan qiymatdan oshib ketishi mumkin ?
qo'shimcha =2,5 ?
janob . Bu xususiyatni yukning kamayishi bilan dvigatelda yuz beradigan jarayonlarni hisobga olish bilan izohlash mumkin. Mexanizmi A nuqtasida tabiiy xarakteristikada ishlagan deb hisoblaymiz (2.9-rasmga qarang). Tezlik bilan barqaror holatda ?
1
. Qarshilik paytidagi qiymatdan tushganda M c1 Masalan, yuqoriga M c2 , ijobiy dinamik moment paydo bo'ladi M D >0
va vosita tezligi ortib bormoqda. Mustaqil qo'zg'alish bilan, buning natijasi emfning o'sishidir. aylanish  va armatura oqimining pasayishi
va armatura oqimining pasayishi  va Turk
va Turk  . Tezlikni oshirish va vosita momentini kamaytirish motor torkigacha davom etadi M teng bo'ladi M c2 va M D nolga aylanadi.
. Tezlikni oshirish va vosita momentini kamaytirish motor torkigacha davom etadi M teng bo'ladi M c2 va M D nolga aylanadi.
Emfni ketma-ket harakatlantirish bilan. aylanish E tezligi ortib borayotgan ikki miqdor funktsiyasi bo'ladi ? va oqim kamayadi F. Natijada, miqdori E, va shuning uchun miqdori Men Men va M, tezlikni oshishi bilan sezilarli darajada o'zgarmaydi, bu esa konservatsiyaga olib keladi M D >0 va tezlikni yanada oshiradi. Agar boshlang'ich reostatning qarshiligi bo'lsa R. P. >0 , keyin statik tezlikni pasayishi ?? bilan Dvigatelning ayni paytda tabiiy xarakteristikasidan ko'proq bo'ladi. Shuning uchun reostat xususiyatlari abscissa o'qiga katta moyil bo'ladi.
Ardışık qo'zg'alish bilan, tork, armatura tokining kvadratiga proportsionaldir  va boshlang'ich tokini qiymati bilan chegaralash Men Men DOPman 2.5I YaN mustaqilligimizdan ko'ra ko'proq narsani olishga imkon beradi M DOP = 5 M H . Dvigatelning tork momentlarini ogohlantiruvchi vosita overcurrent faktor
va boshlang'ich tokini qiymati bilan chegaralash Men Men DOPman 2.5I YaN mustaqilligimizdan ko'ra ko'proq narsani olishga imkon beradi M DOP = 5 M H . Dvigatelning tork momentlarini ogohlantiruvchi vosita overcurrent faktor
K P. = M DOP / M H beshga teng. Ushbu ortiqcha yuk hajmi bir nechta elektr motoriga ega emas. Bu xususiyat tufayli, elektr transportida va ko'tarish mexanizmlarida ketma-ket harakatga keladigan motorlar ishlatiladi.
Dars 8.
^ 2.6. Seriyali qo'zg'alish bilan dvigatelning mexanik xususiyatlari. Elektr tormozlanish tartibi.
Elektr tormozlanishning ikki turi bor: dinamik tormozlash va qarama-qarshi tomondan tormozlash. Regenerativ inhibisyon emf, chunki bu mumkin emas. aylanish Ebir zanjirli manba voltajidan ortiq bo'lishi mumkin emas U.
^ Dinamik tormozlash ikki yo'l bilan amalga oshiriladi: o'z-o'zini uyg'otish va mustaqil tashviqot bilan. Dvigatelni ishga tushirish sxemasi va birinchi holda mexanik xarakteristikalar shakl bo'yicha berilgan. 2.10.
Shakl. 2.10. a) mexanizmni o'zboshimchalik bilan dinamik tormozlash rejimida yoqish sxemasi;
B) o'z-o'zini uyg'unlashtiradigan dinamik tormoz rejimida mexanizmning xususiyatlari.
Dvigatel manba voltajidan uzilib qoladi va maydonni o'rash oqimning yo'nalishi bo'yicha o'zgaradi. Men In Bu erda vosita rejimida bo'lgani kabi bir xil edi (2.8-rasmga qarang). Joriy yo'nalishning bu tutilishi vosita statorining magnitlanishi bilan bog'liq bo'lgan kichik qoldiq oqimni yo'q qilishni bartaraf etadi. Bu oqim o'z-o'zidan qo'zg'alishning sababi hisoblanadi: oldingi yo'nalishda inertial kuchlar ta'siri ostida aylanuvchi armatura o'rab, emf hosil bo'ladi. E, uning yo'nalishi vosita rejimida bir xil. Aksiya doirasida E Dinamik tormozlash devorida oqim paydo bo'ladi, bu F ning oqimining o'sishiga olib keladi, emf. E va joriy Men Men . Hozirgi paytdan beri Men Men vosita rejimiga qarama-qarshi yo'nalishga ega bo'lsa, vosita momenti inhibitor bo'lib qoladi. Birinchi kvadrantdagi A nuqtasidan olingan vosita ikkinchi kadranda dinamik tormozlanish xarakteristikasi bo'yicha B yoki C nuqtalariga o'tadi. Dastlab, o'z-o'zidan harakat qilish jarayoni juda tez o'tadi va bu mexanizmning mexanik qismiga ta'sir etishi mumkin bo'lgan tormoz burg'ulash momentiga olib keladi. Shuning uchun mustaqil harakatlanish bilan dinamik tormozlash tez-tez ishlatiladi. Dvigatelni ishga tushirish sxemasi va mexanik xususiyatlar shakl. 2.11.
Shakl. 2.11. a) Dvigatelni dinamik ravishda ishga tushirish sxemasi
Mustaqil qo'zg'alish bilan tormozlash;
B) dinamikadagi dvigatelning xususiyatlari
Mustaqil qo'zg'alish bilan tormozlash.
Motor armatura kelepçeleri dinamik tormoz qarshilik qisqa tutashuvi R. DT , va o'rash o'rni qarshilik orqali manba kuchlanishiga bog'liq R. In . Undagi oqim vosita rejimida yo'naltiriladi va nominalga teng bo'ladi. Xarakteristikalar DCT ning mustaqil harakatlanishi bilan bir xildir: ular lineer, ikkinchi kadranda joylashgan va kelib chiqishi orqali o'tadi.
^ Yomonlashuv to'xtashi , DCT mustaqil harakatga ega bo'lgan holda, vosita o'rashlarni bir yo'nalish bo'yicha yoqilganda va vosita armatura inertiya kuchlari yoki faol qarshilik harakati ta'siri ostida - teskari yo'nalishda aylantiriladi.
Keyingi ketma-ket qo'zg'alish bilan DKTni ishga tushirish uchun qayta ishlanadigan sxemasi shakl. 2.12.
![]()
Shakl. 2.12. Seriyali qo'zg'alish bilan DCTni almashtirishning teskari sxemasi.
Elementlarning maqsadi, sek. 2.5. Dvigatel armatura tarafidan teskari yo'naltirilganda, ogohlantiruvchi sariq LMdagi oqim yo'nalishi saqlanadi. Shuning uchun, tormozlash jarayonida barcha jarayonlar, sek. 2.5. Dvigatelning xususiyatlari quyidagicha: 2.13.

Shakl. 2.13.a) pastlab rejimida ketma-ket ekskluzivlik bilan DKKning xarakteristikasi antikansiallik bilan belgilanadi.
B) aktiv M bilan o'xshash xususiyatlar.
Dars berish 9.
^ 2.7. İndüksiyon motorlarining mexanik xususiyatlari. Motor tartibi.
Asenkron motorlar (AD) - eng ko'p ishlatiladigan motorlar turi ular oddiyroq va ishonchli ishda, teng kuch bilan DPT bilan taqqoslaganda kichikroq massa, o'lchamlar va xarajatlar mavjud. Qon bosimini kiritish uchun sxemalar shakl. 2.14.
Yaqin vaqtgacha, tartibsiz bo'lmagan elektr drayvlarda ADP sincap kafesli rotor ishlatilgan. Biroq ADning stator saratmalari bilan ta'minlaydigan kuchlanishdagi tristist chastotali konvertorlarning (TPR) paydo bo'lishi bilan sozlanishi elektr drayvlarda sincap-qafasli motorlar ishlatilgan. Hozirgi vaqtda chastotali konvertorlarda kuch-tranzistorlar va programlanadigan kontrolatorlar ishlatiladi. Tezlikni tartibga solish usuli impuls deb nomlanadi va uni takomillashtirish elektr chovgumni rivojlantirishning eng muhim yo'nalishi hisoblanadi.
Shakl. 2.14. a) sincap kafesli rotor bilan ADni ochish sxemasi;
B) ADni faza rotori bilan almashtirish sxemasi.
Qon bosimining mexanik xususiyati uchun tenglama qon bosimi o'zgarish sxemasi asosida olinishi mumkin. Agar statorning bu davrda faol qarshiligini e'tiborsiz qoldirsak, mexanik xarakterga ega bo'lgan ifodalar quyidagicha bo'ladi:
 ,
,
Qaerda  ;
;  .
.
Bu erda M uchun – muhim moment; S uchun - tegishli kritik slaydni; U f - tarmoqning fazaviy kuchlanishining samarali qiymati; ? 0 = 2? F / s - aylanadigan magnit maydonning AD (sinxron tezlik) burchak tezligi; f Besleme voltajining chastotasi; s - qon bosimining qutblari juftligi soni; x uchun - induktiv fazli qisqa tutashuvdagi qarshilik (almashtirish devoridan aniqlanadi); S = (? 0 -?)/? 0 - surma (aylanish maydonining tezligiga nisbatan rotor tezligi); R. 2 1 - Rotorning umumiy faol qarshiligi.
Sincap kafesli rotor bilan ADning mexanik xususiyati shakl 1da ko'rsatilgan. 2.15.
Shakl. 2.15. Qisqa chizilgan rotor mexanik xarakteristikasi.
Unda uchta xarakterli nuqta bor. Birinchi nuqta koordinatalari ( S = 0; ? =? 0 ; M = 0). Rotorning tezligi aylanadigan magnit maydonining tezligiga teng bo'lganda ideal bo'shashish rejimiga mos keladi. Ikkinchi nuqta koordinatalari ( S = S uchun ; M = M uchun). Motor maksimal moment bilan ishlaydi. Qachon M bilan \u003e M uchun vosita rotori to'xtatishga majbur bo'ladi, bu esa vosita uchun qisqa tutashuv rejimidir. Shu sababli, bu nuqtada vosita momenti tanqidiy deb nomlanadi M uchun . Uchinchi nuqta koordinatalari ( S = 1; ? = 0; M = M n). Ushbu nuqtada, vosita ishga tushirish rejimida ishlaydi: rotor tezligi = 0 va dastlabki moment sobit rotor ustida harakat qiladi. M n . Birinchi va ikkinchi xarakterli nuqtalar orasidagi mexanik xarakteristikaning bo'limi ishchi qism deb ataladi. Buning ustiga, vosita barqaror holda ishlaydi. Qisqa davriy rotor bilan, agar shartlar bo'lsa U = U janob va f = f janob mexanik xarakteristikaga tabiiy deb ataladi. Bu holda, xarakteristikaning ish qismida dvigatelning nominal ish rejimiga mos keladigan nuqta va koordinatalari ( S janob ; ? janob ; M janob).
Qon bosimining elektromekanik xususiyatlari ? = f (I f ) DCT ning elektromexanik xususiyatlaridan farqli ravishda, kesma chiziq sifatida shakllantirilgan. 2.15 da faqat uning ish qismida mexanik xarakteristikaga mos keladi. Buning sababi, emfning o'zgaruvchan chastotasiga qarab ishga tushirish vaqtida. rotorli sariqlikda E 2 sarg'ishning indikativ va faol qarshiligining oqimi va chastotasi o'zgaruvchan: boshlanish boshida oqim chastotasi katta va induktiv qarshilik faol bo'lganidan katta; rotor tezligi ortib boradi ? rotor oqimining chastotasi va shuning uchun sariqning induktiv qarshiligi kamayadi. Shuning uchun ADning to'g'ridan-to'g'ri ishga tushirish rejimida chiqish oqimi nominal qiymatdan 5-7 baravar yuqori Men fn , va dastlabki moment M n nominalga teng M janob . DPTdan farqli o'laroq, boshlang'ich davrda va boshlang'ich momentni cheklash kerak, ADni ishga tushirishda dastlabki oqim cheklangan bo'lishi va boshlanish momenti ortishi kerak. Oxirgi holatlar eng muhimdir, chunki DCT mustaqil harakatlanish bilan boshlanadi M bilan janob , DFT ning navbatdagi qo'zg'alishi bilan M bilan janob , va tabiiy bosim ostida ish paytida qon bosimi M bilan janob .
ADda sincap kafesli rotor bilan o'sish kuzatiladi M n Rotor o'rashining maxsus dizayni taqdim etiladi. Rotorni o'rash uchun truba chuqurlashgan va sarg'ishning o'zi ikki qatlamda joylashtirilgan. Motor ishga tushganda chastota E 2 va rotor oqimlari katta, bu esa oqim oqimining faqat sarg'ishning yuqori qatlamida oqishi ta'siriga olib keladi. Shuning uchun, mexanik sariq qarshilik va dastlabki moment M P. . Uning kattaligi erisha oladi 1.5M janob .
ADda bosqichma-bosqich rotor bilan o'sish kuzatiladi M P. mexanik xususiyatlarini o'zgartirish orqali ta'minlanadi. Agar qarshilik bo'lsa R. P. , Rotorning oqim yo'lida joylashgan, nolga teng - motor tabiiy xarakteristikada ishlaydi M P. = M H . Qachon R. P. >0 rotor fazasining umumiy faol qarshiligi ortadi R. 2 1 . Muhim sirtish S uchun kabi R. 2 1 ham ortadi. Natijada ADda o'zgarishlar rotori bilan introduktsiya R. P. rotorning oqim yo'lida almashtirishga olib keladi M To katta slaydlar tomon yo'naltiriladi. Qachon S To = 1 M P. = M To . Atom mexanik xususiyatlari R. P. >0 sun'iy yoki reostatik deyiladi. Ular rasmda ko'rsatilgan. 2.16.
Shakl. 2.16. AD rotorining mexanik xususiyatlari.
Sincap kafesi rotorlu bir indüksiyon motori boshlanadi M n \u003e M bilan va A nuqtasida ishlaydi (2.15-rasmga qarang). Shundan so'ng qarshilik harakati M bilan ko'paytirish mumkin M To . AD, shuningdek, shahar dvigatellari kuchayib boradi M bilan tashqi aralashuvisiz avtomatik ravishda tezlikni kamaytiradi ? va torkni oshiring M uzoq vaqt davomida M va M bilan Hajmi teng emas, ya'ni. barqaror rejimdan yuqori tezlik bilan pastroq tezlik bilan sobit rejimga o'tish uchun. Kamlashda M bilan buning aksi kuzatiladi - past tezlikda sobit holatdagi vosita avtomatik ravishda yuqori tezlikda sobit rejimga o'tadi. Qon bosimining mexanik tavsifining ishchi qismini DCT ning mustaqil harakatlanishi bilan o'xshashligi - abscissa tizmasiga mos keladigan tekis chiziq.
Qon bosimining bunday xususiyatlari emfga bog'liq. E 2 , rotorning sargardagi statorning qaytib magnit maydoni tomonidan indüklenir. Qachon M bilan \u003e M dinamik moment M g va rotor tezligi ? kamayadi. Statorning magnit maydoni doimiy tezlikda aylanadi ? 0 (sinxron tezlik) rotorning sarg'ishini yuqori chastotali tezlik bilan kesib o'tadi. Shuning uchun, E 2 , rotorli sariqlikdagi oqim, Ampere kuchi o'z navbatida harakat qiladi va shuning uchun moment M.
AD uchun momentni haddan tashqari yuklab olish qobiliyati muhim momentni nisbati bilan belgilanadi M To nominal vaqtga ko'ra M H . Sincap kafesli rotor bilan an'anaviy AD uchun M To / M H =1,7 , o'zgarishlar rotori bilan M To / M H =1,8 . MTK tipidagi sincap kafesli rotori va MTKF tipidagi o'zgarishlar rotori bilan maxsus kran bosimi uchun M To / M H = 2.3 h3.4.