Antipiretici za djecu propisuje pedijatar. Ali postoje situacije hitne nege groznice, kada dete treba odmah da lek. Zatim roditelji preuzmu odgovornost i primenjuju antipiretičke lekove. Šta je dozvoljeno dijete? Kako možete smanjiti temperaturu kod starije dece? Koji su lekovi najsigurniji?
Prilikom projektovanja električnog pogona, motor mora biti odabran tako da njegove mehaničke karakteristike odgovaraju mehaničkim karakteristikama proizvodnog mehanizma. Mehaničke karakteristike daju međusobnu povezanost varijabli u režimima stabilnog stanja.
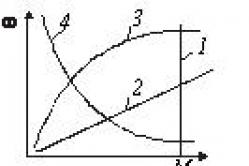
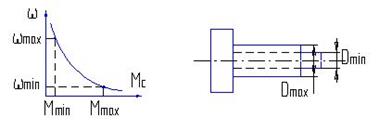
Mehanička karakteristika mehanizma nazvana je veza između ugaone brzine i momenta otpora mehanizma, svedena na osovinu motora) ω = f (Mc).
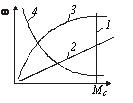
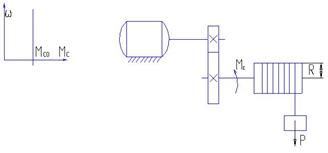
Fig. 1. Mehaničke karakteristike mehanizama
Među sortama su nekoliko karakterističnih vrsta mehaničkih karakteristika mehanizama:
1. Karakteristično sa momentom otpora, a ne zavisno od brzine (ravna linija 1 na slici 1). Mehanička karakteristika nezavisna od brzine grafički je predstavljena ravnom linijom paralelnom sa osa rotacije, u ovom slučaju vertikalnom. Takve karakteristike su, na primer, podizanje kranova, vitla, klipnih pumpi sa konstantnom visinom izvlačenja itd.
2. Karakteristično sa momentom otpornosti linearno u zavisnosti od brzine (ravna linija 2 na slici 1). Ova zavisnost je inherentna, na primer, na pogon generatora jednosmerne struje sa nezavisnom ekscitacijom, koja posluje na konstantnom opterećenju.
3. Karakteristika sa nelinearnim porastom momenta (kriva 3 na Sl. Tipični primeri su karakteristike ventilatora, centrifugalnih pumpi, propelera. Za ove mehanizme, trenutak Mc zavisi od kvadrata ugaone brzineω
. Ovo je tzv. parabolične (ventilatorske) mehaničke karakteristike.
4. Karakteristika sa nelinearnim opadajućim momentom otpora (krivina 4 na slici 1). Ovde je trenutak otpora obrnuto proporcionalan brzini rotacije. Snaga u ovom slučaju ostaje konstantna u čitavom opsegu brzine rada mehanizma. Na primjer, u mehanizmima glavnog kretanja nekih mašina za sečenje metala (okretanje, glodanje, bušenje), trenutak Mc varira obratno sa ω, a snaga potrošena mehanizmom ostaje konstantna.
Mehanička karakteristika elektromotora je zavisnost njegove ugaone brzine na momentu ω d = f (M). Ovde treba imati u vidu da trenutak M na vratilu motora, bez obzira na pravac rotacije, ima pozitivan znak - trenutak kretanja. Istovremeno, trenutak otpornosti Mc ima negativan znak.
Kao primeri na Sl. 2 prikazuje mehaničke karakteristike: 1 - sinhroni motor; 2 - nezavisni motor jednosmerne struje; 3 - DC motor serijske ekscitacije.
![]()
Fig. 2. Mehaničke karakteristike elektromotora
Da bi se procenili osobine mehaničkih karakteristika električnog pogona, koristi se koncept rigidnosti karakteristika. Rigidnost mehaničke karakteristike određuje se izrazom
β = dM / dω
gdje d M - promeni obrtni moment motora; d ω d je odgovarajuća promena u ugaonoj brzini.
Za linearne karakteristike, vrednost β ostaje konstantna, za nelinearne one zavisi od radne tačke.
Koristeći ovaj koncept, karakteristike prikazane na Sl. 2, može se kvalitativno ocijeniti na sljedeći način: 1 - apsolutno krut (β = ∞); 2 - kruta; 3 - meko.
Apsolutno kruta karakteristika - brzina motora ostaje nepromenjena kada se opterećenje motora razlikuje od nule do nominalne. Sinhroni motori imaju ovu karakteristiku.
Rigidna karakteristika - brzina rotacije je neznatna kada se opterećenje promeni od nule do nominalne. Ova karakteristika ima motor sa jednosmernom strujom uz paralelno uzbuđenje, kao i indukcioni motor u području linearnog dela karakteristike.
Mekana karakteristika - Brzina rotacije motora značajno varira s relativno malim promjenama u opterećenju. Takvu karakteristiku poseduje DC motor sa serijskim, mešanim ili paralelnim uzimanjem, ali sa dodatnim otporom u krugu armature, a takođe je asinhroni sa otporom u krugu rotora.
Za većinu proizvodnih mehanizama koriste se asinhroni motori sa vibracionim kavezom sa krutim mehaničkim karakteristikama.
Sve mehaničke karakteristike elektromotora podeljene su na prirodne i veštačke.
Prirodne mehaničke karakteristike odnosi se na radne uslove motora sa nominalnim vrednostima parametara.
Na primer, za motor sa paralelnim ekscitacijom može se konstruisati prirodna karakteristika za slučaj kada napon na armaturi i struja ekscitacije imaju nominalne vrijednosti, a nema dodatnog otpora u krugu armature.
Prirodna karakteristika asinhronog motora odgovara nominalnom naponu i nominalnoj frekvenciji izmenjive struje koja se isporučuje statoru motora, pod uslovom da nema dodatne otpornosti u krugu rotora.
Prema tome, za svaki motor, prirodna karakteristika se može izgraditi samo jednim, a veštačko - neograničen broj. Na primjer, svaka nova vrijednost otpornosti motornog armatura DC ili u lancu rotorja asinhronog motora ima svoje mehaničke karakteristike.
Statička mehanička karakteristika motora nazvana je zavisnost brzine od obrtnog momenta motora. w = | (M). Gotovo svi motori imaju svojstvo da njihova brzina predstavlja smanjenu funkciju obrtnog momenta motora. Ovo se odnosi na sve konvencionalne elektromotore koji se koriste u industriji, to jest na DC motore nezavisnog, sekvencijalnog i mešovitog uzimanja, kao i na asinhronim četkicama bez četkica i kolektora. Međutim, stepen promjene brzine sa varijacijom obrtnog momenta za različite motore je drugačiji i karakteriše ga tzv rigidnost njihove mehaničke karakteristike.
Rigidnost mehaničkih karakteristika pogona- je odnos povećanja obrtnog momenta razvijenog uređaja elektromotora, sa promenom brzine, do odgovarajuće razlike u ugaonim brzinama električnog pogona:
![]()
Tipično, u radnim područjima, mehaničke karakteristike motora imaju negativnu čvrstoću β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Rigidnost mehaničke karakteristike u geometrijskom smislu je nagib mehaničke karakteristike motora.
Ako uporedite karakteristike 1 i 2, karakteristika 1 je mekša, jer Njegov nagib je manji
DM 1\u003e DM 2 Þ b 1\u003e b 2, od i.
Mehaničke karakteristike elektromotora mogu se podeliti u četiri glavne kategorije:
1. Apsolutno kruta mehanička svojstva (β = ∞) je karakteristika u kojoj brzina sa promjenom trenutka ostaje nepromijenjena. Sinhroni motori imaju ovu karakteristiku (ravna linija 1 na slici 1).
2. Kruta mehanička karakteristika Ovo je karakteristika u kojoj brzina s promenom obrtnog momenta, iako se smanjuje, ali u manjem obimu. Krutu mehaničku karakteristiku poseduju DC motori nezavisnog uzimanja, kao i asinhroni motori unutar radnog dijela mehaničke karakteristike (kriva 2 na slici 1).
Za indukcioni motor, krutost na različitim tačkama mehaničke karakteristike je različita. Između maksimalnih (kritičnih) vrednosti trenutaka u motoru Mk, q i generatora Mk, r modova, karakteristika indukcionog motora ima relativno visoku rigidnost.
 3. Meke mehaničke karakteristike je karakteristika u kojoj se brzina značajno menja s promjenom trenutka. Ovakve karakteristike poseduju DC motori serijske ekscitacije, posebno u zoni malih trenutaka (kriva 3 na slici 2). Za ove motore, krutost ne ostaje konstantna za sve tačke karakteristika.
3. Meke mehaničke karakteristike je karakteristika u kojoj se brzina značajno menja s promjenom trenutka. Ovakve karakteristike poseduju DC motori serijske ekscitacije, posebno u zoni malih trenutaka (kriva 3 na slici 2). Za ove motore, krutost ne ostaje konstantna za sve tačke karakteristika.
DC motori mešovitog uzbuđenja mogu se dodijeliti drugoj ili trećoj grupi, zavisno od vrijednosti rigidnosti mehaničke karakteristike.
4. Apsolutno mekana mehanička karakteristika (β = 0) je karakteristika u kojoj ugaona brzina motora ostaje nepromenjena. Ovakve karakteristike poseduju, na primer, motori sa jednim uzdužnim strujanjem, koji se napajaju iz strujnog izvora ili kada rade u zatvorenim sistemima električnog pogona u načinu stabilizacije struje armature (linija 4 na slici 2).
Mehaničke karakteristike radne mašine Da li je zavisnost brzine radne mašine u momentu otpora, što stvara w = | (M c).
Mehaničke karakteristike opisuju opterećenje na električnom pogonu.
Klasifikacija tipičnih opterećenja:
1. Aktivni moment otpora M c = const
Primer: pogon vitla za dizanje.
Opterećenje je u mogućnosti da aktivira sam mehanizam, zbog čega se naziva aktivnim. Za konstrukciju mora biti obezbeđena parking kočnica.
2. reaktivni moment otpora M c = const (opterećenje tipa konstantnosti momenta)
Tipično za mehanizme kao što su "suvo trenje".
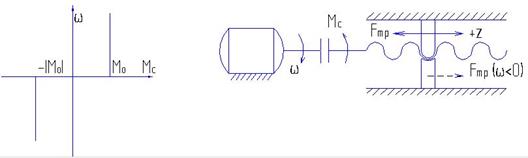
M c = M 0 znak (w).
w\u003e 0 Þ M c\u003e 0; w<0 Þ М с <0.
Reaktivni moment je reakcija na brzinu w.
3. Viskozno trenje
M c = α BT ω
Moment otpora je proporcionalan brzini.
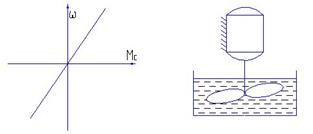
bw je koeficijent viskoznog trenja.
4. Momenat ventilacije
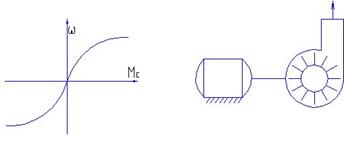
M c = kw 2 znak (w).
Tipično za centrifugalne ventilatore i pumpe.
Ako je ulaz zatvoren, obrtni moment će se smanjiti.
P = M c w je snaga.
5. Konstantna snaga P = const
Gde je P c = const.
Često se koristi za glavne pogone alatnih mašina (struganje, glodanje, bušenje, brušenje i druge mašine).
w max ∙ M min = w min ∙ M max = konst.
Hajde da razmislimo o pretvaranju:
w = const, F p = const.

Za planere:
P 1 = v min • F max - radni hod, P 1 = v max • F min - prazan hod.
P 1 »P 2 = konst.
Karakteristike izbora motora:
Kod P 1 = 5 kW dobijamo P dv = 5 ∙ 100 = 500 kW.
Direktni izbor motora od graničnih vrijednosti dovodi do precjenjivanja instalirane snage motora u D w puta, pri čemu je D w opseg kontrole brzine. Zapravo, snaga motora se može posebno smanjiti, izborom opsega kontrole brzine.
Za DFT, HB je kontrola brzine za strujne struje.
Mehanička karakteristika motora nazvana zavisnost brzine rotacije rotor od momenta na osovinu n = f (M2). Pošto je ispod opterećenja, obrtni momenat je mali, onda je M2 ≈ M, a mehanička karakteristika predstavlja zavisnost n = f (M). Ako uzmemo u obzir međusobnu relaciju s = (n1 - n) / n1, onda se mehanička karakteristika može dobiti dobijanjem grafičke zavisnosti u koordinatama n i M (sl.
Fig. 1. Mehanička karakteristika asinhronog motora
Prirodna mehanička karakteristika indukcionog motora odgovara glavnoj (pasošnoj) šemi njenog uključivanja i nominalnim parametrima napona napajanja. Veštačke karakteristikese dobijaju ako su uključeni dodatni elementi: otpornici , reaktori , kondenzatori . Kada se motor napaja nepreviznim naponom, karakteristike se takođe razlikuju od prirodnih mehaničkih karakteristika.
Mehaničke karakteristike su vrlo zgodan i koristan alat za analizu statičkih i dinamičkih režima električnog pogona.
Glavne tačke mehaničkih karakteristika: kritični klizač i frekvencija, maksimalni obrtni momenat, startni moment, nominalni obrtni moment.
Mehanička karakteristika je zavisnost obrtnog momenta na klizanju, ili, drugim rečima, od broja revolucija:
![]()
Iz izraza  može se videti da je ova zavisnost vrlo komplikovana, jer, kako se kaže formula,
može se videti da je ova zavisnost vrlo komplikovana, jer, kako se kaže formula,  i
i  , slip takođe ulazi u izraze za Ja 2
i cos? 2. Mehanička karakteristika asinhronog motora obično se daje grafički
, slip takođe ulazi u izraze za Ja 2
i cos? 2. Mehanička karakteristika asinhronog motora obično se daje grafički
Početna tačka karakteristike odgovara n = 0 i s = 1: ovo je prvi trenutak pokretanja motora. Startni moment M n - veoma važna karakteristika operativnih osobina motora. Ako je M n mala, manja od naznačenog operativnog obrtnog momenta, motor se može pokrenuti samo u praznom hodu ili sa odgovarajućim smanjenim mehaničkim opterećenjem.
Obeležite M np Kretanje obrtnog momenta (kočenja) stvorenog mehaničkim opterećenjem na vratilu na kojem motor počinje. Očigledan uslov za mogućnost pokretanja motora je: M n > M np . Ako je ovaj uslov ispunjen, pokretač motora će se pomeriti, broj njegovih obrtaja n će se povećati i kliziti s da se smanji. Kao što se vidi iz gornje slike, obrtni moment motora se povećava M n do maksimuma M m , što odgovara kritičnom klizanju s kp, dakle, višak raspoložive snage motora, određen je razlikom u trenucima M i M np .
Što je veća razlika između raspoloživog momenta motora (moguće sa datim klizačem u radnoj karakteristici) M i suprotstavljanje M np , lakše je pokretanje i brži motor postiže stabilnu brzinu rotacije.
Kako pokazuju mehaničke karakteristike, u određenom broju obrtaja (u s = s kp) raspoloživi obrtni moment motora dostigne maksimalno moguće za dati motor (pri datom naponu U ) vrijednosti M t . Nadalje, motor nastavlja da povećava brzinu rotacije, ali raspoloživi obrtni moment se brzo smanjuje. U nekim vrednostima n i s obrtni moment motora postaje jednak counter-momentu: početak motora se završava, njegova brzina se podešava na vrijednost koja odgovara odnosu:
![]()
Ovaj odnos je obavezan za sva opterećenja motora, odnosno za sve vrednosti M np , ne prelazeći maksimalni obrtni moment motora M t . U okviru ovih granica, motor se automatski prilagođava svim fluktuacijama opterećenja: ako se tokom rada motora povećava mehaničko opterećenje, za trenutak M np biće više od trenutka koji je razvio motor. Brzina motora počinje da se smanjuje, a trenutak će se povećati.
Brzina rotacije utvrđena je na novom nivou koji odgovara ravnopravnosti M i M np . Kada se opterećenje smanji, proces prelaska na novi režim opterećenja će se promeniti.
Ako je obrtni moment opterećenja M np će biti veća M t , motor se odmah zaustavlja, jer se sa smanjenjem broja obrtaja motora smanjuje.
Dakle, maksimalni obrtni momenat motora M t se takođe zove preokret ili kritičan trenutak.
Ako u ovom trenutku formula ![]() zameni:
zameni:
onda dobijamo:
Uzimajući prvi derivat M i izjednačavanjem na nulu, utvrdimo da maksimalna vrijednost momenta dolazi kada:
to jest, sa takvim klizanjem s = s kp , pri čemu je aktivni otpor rotora jednak induktivnom otpornosti
![]()
značenje s kp većina asinhronih motora leži u rasponu od 10 do 25%.
Ako je u gornjoj formuli trenutka umjesto aktivnog otpora r 2 zamenite induktivnu formulu
![]()
Maksimalni obrtni momenat asinhroni motor je proporcionalan kvadratu magnetnog fluksa (a samim tim i kvadrata napona) i obratno proporcionalan induktivnosti raspršivanja navijanja rotora.
Kada je napon na motoru konstantan, njegov fluks F ostaje skoro nepromenjena.
Induktivnost rasipanja lanca rotor je takođe praktično konstantna. Stoga, kada se aktivni otpor u krugu rotora menja, maksimalna vrednost obrtnog momenta M t Neće se menjati, već će se pojaviti na različitim listovima (sa povećanjem aktivnog otpora rotor-za velike vrijednosti klizanja).
Očigledno je maksimalno opterećenje motora određeno njegovom vrednošću M t . Radni deo performansi motora leži u uskom rasponu brzine od n, odgovarajuće M t , do. Kada n = n 1 (kraj tačke karakteristike) M = 0, s obzirom na brzinu sinhronog rotora s = 0 i I 2 = 0.
Nominalni obrtni moment koji određuje vrijednost nominalne snage motora obično se uzima od 0,4-0,6 M t . Stoga, asinhroni motori omogućavaju kratko vreme preopterećenja od 2,5 puta.
Glavni parametar koji karakteriše rad indukcijski motor klizi e - relativna razlika između brzine rotora n i polje n: s = (n o - n) / n o.
Površina mehaničke karakteristike koja odgovara 0 ≤ s ≤ 1 je oblast režima motora, sa s< s кр работа двигателя устойчива, при s > s cr je nestabilna. Za s< 0 и s > 1 obrtni moment motora je usmeren prema smeru rotacije njegovog rotora (odnosno regenerativnog kočenja i kočenja suprotno).
Često se opisuje stabilan deo mehaničkih karakteristika motora formula Kloss , supstitujući u njega parametre nominalnog moda, može se odrediti kritični klip s cr:
 ,
,
gde: λ = M kp / M n - preopterećenje motora.
Mehaničke karakteristike prema katalogu ili katalogu mogu približno biti konstruirane na četiri tačke (slika 7.1):
Point 1 - idealno u praznom hodu, n = n o = 60 f / p, M = 0, gdje je: p - broj magnetni pol parova polja motora;
Tačka 2 - nominalno, način rada: n = n n, M = M n = 9550 P n / n n, gde P n - nazivna snaga motora u kW;
Tačka 3 - kritični mod: n = n cr, M = M cr = λ M n;
Tačka 4 - način rada: n = 0, M = M start = β M N.
Kada se analizira opseg rada motora teret za M n i nešto stabilnije dijela mehaničke karakteristike može se približno opisati jednadžbe ravne linije n = 0 n - u M, gdje je koeficijent "a" se lako određuje zamjenom u jednadžbu parametara obrtaja n i M n.
Stator namotaja dizajna. Jedno-slojni i dvoslojni obujmice petlje.
Prema dizajnu kalema, namotaji su podeljeni na mekane kalemove sa navojima i navojima sa krutim navojima ili kalemovima. Mekani namotaji su izrađeni od žice okruglog izolacionog materijala. Da prenese željeni oblik pre-rana na predlošku, a zatim stavlja u izoliranim trapeznog žljebovima (vidi. Sl. 3.4, u, gi 3.5, u); međufazne izolacione podloge se postavljaju tokom procesa navijanja. Onda je jačanje zavojnica u utore pomoću klinova ili poklopaca, dati im konačni oblik (formirana frontalni dio) se vrši banding navijanje i njegove impregnacije. Celokupni proces izrade navoja tipa V može se potpuno mehanizirati.
Kruti kalemi (polu-navoje) su napravljeni od pravougaone izolovane žice. Konačni oblik se daje pre nego što se ingu. istovremeno su nadvišene na tijelo i izolaciju od faze do faze. Zatim, zavojnice se postavljaju u izolovane otvorene ili poluotvorene žlebove , ojačati i impregnirati.
1. Jednoslojni namotaji - posebno pogodan za mehanizovanu polaganje, jer u ovom slučaju, navijanje bi trebao biti koncentrični i stavlja u slotove namotaja statora obje strane istovremeno. Međutim, njihova upotreba dovodi do povećane potrošnje žice za namotavanje zbog značajne dužine čelnih dijelova. Osim toga, u takvim namotaja nije moguće izvršiti skraćivanje koraka, što dovodi do pogoršanja oblika magneta polje u prazninu zraka, dodatno povećanje gubitaka, pojava kvarova u mehaničke karakteristike i povećanje buke. Međutim, zbog svoje jednostavnosti i jeftinoća takvih navijanje je naširoko koristi u low-power indukcije motora 10-15 kW.
2. Dvoslojni namotaji- omogućiti skraćivanje tačke navijanja na bilo koji broj delova zuba, čime se poboljšava oblik magnetskog polja proizvedenog namotavanjem i potisnu viši harmonici u EMF krivulji. Osim toga, sa dvoslojnim namotajima dobija se jednostavniji oblik frontalnih veza, što pojednostavljuje proizvodnju namotaja. Takvi namotaji se koriste za motore snage preko 100 kW sa krutim kalemima koji se postavljaju ručno.
Statorski namotaji. Jednoslojni i dvoslojni talasni namotaji
U žljebovima jezgra statora postoji višefazni namotaj, koji je povezan na mrežu naizmenične struje. Višestazni simetrični namotaji sa više faza tuključi tfazni namotaji koji se povezuju na zvezdu ili poligonu. Tako, na primer, u slučaju trofaznog namotaja statora, broj faza m =3 i namotaja se mogu povezati sa zvezdom ili trouglom. Namotavanje između faza je nadoknađeno za ugao od 360 / t deg; za trofazni namotaj, ovaj ugao je 120 °.
Fazni namotaji se izrađuju iz odvojenih zavojnica povezanih serijski, paralelno ili serijski paralelno. U ovom slučaju, namotajmislimo na nekoliko sukcesivno povezanih namotaja statorskih namotaja koji se nalaze u istim žljebovima i imaju zajedničku izolaciju u odnosu na zidove žljebova. Zauzvrat namotajdva aktivna (tj. Smeštena u jezgru statorskog) provodnika postavljena su u dva žljebnjaka uz susedne suprotne polove i povezana su jedna s drugim u nizu. Provodnici koji se nalaze izvan jezgra stora i povezuju aktivne provodnike jedni sa drugima nazivaju se prednji dijelovi namotaja. Pravolinijski delovi namotaja namotaja, položeni u žljebove, nazivaju se strane kalemova ili žljebova.
Statorski žljebovi u kojima se namotaju lukovi od tzv. Zuba na unutrašnjoj strani stora. Poziva se razdaljina između centara dva susedna zuba jezgra statora, merena duž njegove površine okrenuta vazdušnom jastu podela zubaili slot divizija.
Višeslojni cilindrični namotaji namotaja (slika 3) su navijeni od okrugle žice i sastoje se od višeslojnih disk namotaja koji se nalaze duž šipke. Između navojnika (preko svakog kalema ili kroz dva ili tri kalema) može se ostaviti radijalni kanali za hlađenje. Takvi namotaji se koriste na visokonaponskoj strani kada S ≤ 335 kV × A, Ja ≤ 45 A i U ltr ≤ 35 kV.
Jednoslojni i dvoslojni cilindrični namotaji (slika 4) su navijeni od jednog ili više (do četiri) paralelnih pravougaonih provodnika i koriste se za S ≤ 200 kV × A, Ja ≤ 800 A i U ltr ≤ 6 kV.
TEMA PREDAVANJA 10
Mehaničke karakteristike elektromotora
PLAN PREDAVANJA
1. Prirodni i veštačkimehaničke karakteristikeelektromotori
- Tvrdoća mehaničke karakteristike
- Prirodna mehanička karakteristika strujnog motora paralelnog uzimanja
- Prirodne mehaničke karakteristike
- Prirodno
- Mehanička karakteristika sinhronog motora. Obim sinhronih motora na brodovima
Mehanička karakteristika motora, bez obzira na vrstu struje, je zavisnost ugaone brzine osovine motora ω (u daljem tekstu motor) na elektromagnetnom momentu motora, tj. Zavisnosti od ω (ω).
Ovde treba napraviti važno zapažanje: u skladu sa jednačinom trenutaka, u stalnom stanju =, elektromagnetni moment motora counterbalanced statički moment (trenutak ohm otpora) mehanizam. To znači veličina elektromagnetnog momenta motora potpuno zavisi od trenutka mehanizma?? Što je kočni moment mehanizma veći, veći je obrtni momenat motora i obrnuto.
To jest, za bilo koji motor, ulazna vrednost je trenutak mehanizma i izlaz?? njegova brzina.
Stopa gotovo svih motora je opadajuća funkcija obrtnog momenta motora, i.e. moment stopa rasta je smanjena [chill 33]. Ali brzina promene brzine za različite elektromotore je različita i karakteriše se parametrom rigidnost mehaničkih karakteristika.
Krutost mehaničke karakteristike električnog pogona β odnos razlike elektromagnetskog momenta motora pri različitim brzinama odgovara razlici između ugaonih brzina pogona.
β = (M 2 M 1) / (ω 2 ω 1) = Δ / Δω
Obično u radnim područjima mehaničke karakteristike elektromotora imaju negativnu čvrstoću β< 0, так как(ω2 < ω1 ,
M 1< М 2 ) при большей скорости электромагнитный момент меньше.
Odlično prirodni i veštačkimehaničke karakteristikei elektromotori.
Prirodne mehaničke karakteristike ?? ovo je zavisnost ω (), uzeta na normalu uslovi rada motora, npr. pri nominalnim parametrima mreža za snabdevanje i odsustvo dodatnih otpornikau lancima namotaja motora.
Parametri napajanja su: u stalnoj struji? napon, sa izmenjivom strujom? napona i frekvencije struje.
Karakteristike uzete pod uslovima, osim normalne, zvana vještačka.
Artificial karakteristike mogu se dobiti mijenjanjem parametara motora, npr uvođenjem otpornika za DC motor armature navijanje spoja ili u indukcionog motora namotaja rotora spoja, ili promijeniti mrežni parametri, i.e. napona i frekvencije promjene struje.
Svaki elektromotor ima jedan prirodan i set veštačkih karakteristike. Broj umjetnih karakteristika ovisi o broju faza prilagođavanja članica, na primjer, podešavanje broj faza u Reostat namotaja krug DC motor armature. Ako je motor takvih faza? pet, onda ovaj motor ima šest karakteristika? pet veštačkih i jedno prirodno.
Veštačke mehaničke karakteristike koriste se za dobijanje takvih režima rada motora kao što su kontrola brzine, obrnuto, električno kočenje itd.
Razmislite o prirodnomth mehaničke karakteristike motorarazličite vrste.
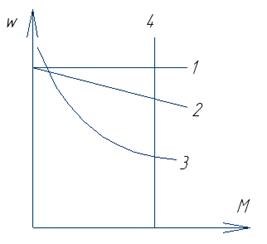
Fig. 10.1 Prirodni mehanički (a) i uglovi (b) karakteristike sinhronog motora; θ ugao zaustave osovine rotora sa osi magnetnog polja statorskog vijka
Prirodna mehanička karakteristika sinhronog motora
Prirodna mehaničkakarakterizacija sinhroni motor(Slika 10.1a)? apsolutno kruto?? ovo je karakteristika u kojojbrzina promene trenutka se ne menja, njegova rigidnost (β = ∞)
β = Δ / Δω = Δ / 0 = ∞.
C tabilnost sinkroni rotora ugaone brzine objašnjava karakteristike sinhronog motora θ () kako slijedi (Sl. 10.1 b), ako je mehaničko opterećenje se ne primjenjuje na rotoru, ose rotora i obrtnog magnetnog polja statora namotaja su isti, i.e., θ = 0 ° (tačka 0 na slici 10.1 b). Ako je elektromagnetni moment motora M = 0, motor radi u praznom hodu.
Ako se nanosi na osovinu motora mehaničkih opterećenja i povećati, rotor pod dejstvom mehaničkog stresa će zadržati magnetskog polja statora namotaja sve veći kut θ.
Što je veće mehaničko opterećenje na vratilu, veći je ovaj ugao i veći rotacioni elektromagnetni moment motora.
Ovo istovremeno povećanje obrtnog momenta motor, uzrokovano povećanjem kočnog momenta mehanizma samo obezbeđuje stabilnost brzine motora (na slici 10.1 a karakteristični deo je od = 0 do =).
Međutim, postojanost broja obrtaja motora se održava sve dok ugao θ ≤ 90 °. Kod θ = 90 °, motor razvija kritični (maksimalni) moment (tačka A na slici 10.1 a).
Ako θ = 90 ° ponovo povećati mehaničko opterećenje (θ\u003e 90 °), elektromagnetskih moment motora će se smanjiti (segment AB ugaoni karakteristike), i.e. ovaj trenutak će biti manji od kočnog momenta mehanizma. Kao rezultat, brzina rotora motora će se smanjiti, i na kraju će se rotor zaustaviti.
Budući da je u ovom slučaju brzina rotora manja od brzine obrtnog magnetnog polja statora namotaja, kažu da je motor je ispao iz synchronism.
Kao što sledi iz uglovne karakteristike motora, uslov za gubitak motora od sinhronizma je: θ≤90 °.
U praksi, nominalni ugao je θ = 20 ... 40 °.
Obim sinhronih motora: na brodovima ?? kao vjetroelektrični motori, okretni vijci; na obali? za pokretanje moćnih mehanizama, na primjer, kompresora na pumpnim pumpama.
Prirodna mehanička karakteristika motora DC
Prirodno mehaničke karakteristike DC motoraparalelno uzbuđenje (slika 8.5) ??pa, jer njegova krutost
β = Δ / Δω ≤ 10%.
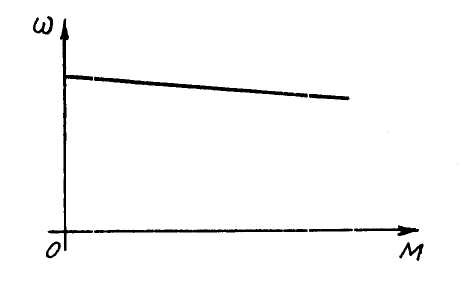
Fig. 10.2 Prirodno mehanička karakteristika paralelnog motora jednosmerne struje
To znači da kada elektromagnetskog momenta motora u širokom rasponu brzina je dovoljno stabilna (i.e., ne bitno promijeniti).
Takvi motori se koriste, gdje se, kada se opterećenje mehanizma razlikuje u širokim granicama, brzina motora ne bi trebalo da se oštro menja? u električnim pogonima pumpi, ventilatora itd.
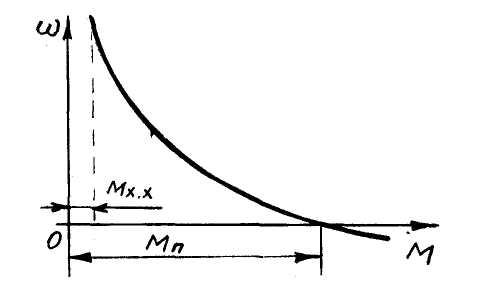
Fig. 10.3 Prirodno mehaničke karakteristikedC motor jednosmerne struje
Prirodno mehaničke karakteristike DC motora serijske ekscitacije (Sl. 10.3) ?? meko , jer je njegova rigidnost
β = Δ / Δω\u003e 10%.
To znači da kada se elektromagnetni moment motora menja, čak iu malom opsegu, njegova brzina se značajno menja.
Podsetimo se na dve karakteristične karakteristike ovog motora DC motor jednosmerne struje:
- Sa smanjenjem mehaničkog opterećenja na vratilu ili njegovim odsustvom (=)
brzina motora naglo se povećava, motor "ide u vožnji". Zbog toga se ovaj motor ne može ostaviti istovarenim na vratilu;
- Prilikom pokretanja motor razvija početne momente više od drugih tipova motora.
Ovi motori se ne odnose na sudove, ali se koriste na plaži, na primjer, u električnom transportu, posebno u kolicima, gdje su nije ostavio bez tereta na vratilu i koje je potrebno velikim momentom (kada vuče kolica sa prostorom).
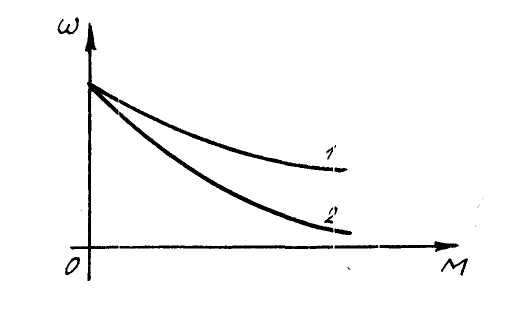
Fig. 10.4 Prirodno mehaničke karakteristike DC motora mešovite ekscitacije: 1 s paralelno-sekvencijalno uzbuđenje;
2-s sekvencijalno paralelno uzbuđenje
Prirodno mehanička karakteristika motora DC mešovitog uzimanja je posredna između karakteristika paralelnih i sekvencijalnih motora, magnetni tok ekscitacije stvoren je zajedničkim dejstvom oba namotaja? paralelni i serijski.
Postoje dve vrste mešovitih motora za uzbunu:
- sa paralelnim ?? serija pobude čiji je najveći dio rezultanta magnetskog toka stvara paralelni navijanje (do 70%, preostalih 30% sekvencijalni);
2. sa sekvencijalno šant, u kojoj je većina rezultanta magnetskog toka stvara niz navijanje (do 70%, preostalih 30%paralelno.
Prema tome, grafikon mehaničkih karakteristika motora prvog tipa je strožiji od motora drugog tipa.
Obe mehaničke karakteristike?? meko , jer je njihova rigidnost
β = Δ / Δω\u003e 10%.
Na brodovima, mešani motori za uzbunu se koriste u regulisanim električnim pogonima? vitle, slavine, sidrne vitke i ograde.
Prirodna mehanička karakteristika indukcionog motora
Prirodno mehanička karakteristika indukcionog motora ima dva dijela? ne-radni (obnovljivi) AB i radni avioniD (slika 8.8).
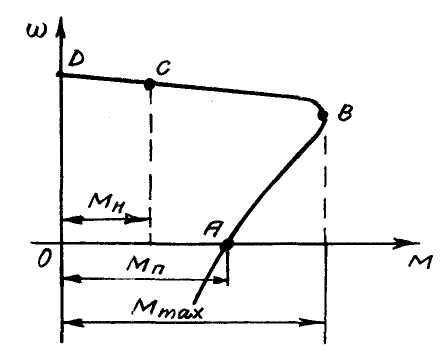
Fig. 10.5 Prirodno mehaničke karakteristike indukcionog motora
Pri startovanju motor razvija početni moment(Segment OA), a zatim ubrzava stazom ABC do tačke C. Tako području AB istovremeno povećanje i brzinu i obrtnog momenta, u jednom trenutku u motor proizvodi maksimalni obrtni moment. Na sekciji vazduhoplova brzina nastavlja da se povećava, a trenutak se smanjuje, na nominalni (tačka C). Na lokacijiBC motor je preopterećen, t. bilo gdje u ovom odeljku elektromagnetni obrtni moment motora je veći od nominalnog obrtnog momenta (> >).
U normalnim uslovima, motor radi u odeljku CD , čija je rigidnost
β = Δ / Δω < 10%.
To znači da kada se obrtni moment razlikuje u širokom opsegu, brzina motora se menja neznatno.
Asinhroni motori pronašli su najširu primenu na brodovima sa AC elektranom.
Industrija proizvodi posebno za brodove asinhrone motore različitih serija, na primjer, 4A ... OM2 (četvrta serija asinhroni motori), MAP (Marine asinhroni polyusopereklyuchaemy), MTP (c rana rotora) i drugi.
Tako motori serije 4A ?? jednokratna, MAP serija ?? dvo-i tri brzine, serija MTF ?? broj brzina određuje kontrolni krug (do 5 brzina).
Predavanje 7.
2.5. Mehaničke karakteristike DC motora sa serijskom ekscitacijom. Motorni režim
Shema za uključivanje motora prikazana je na Sl. 2.8. Sidro motor M i LM pobudnog namotaja su povezani u seriju i pokreće jedan izvor U. Dakle, armatura struja Ja ja takođe je struja uzbuđenja Ja u . Ova okolnost određuje jedina razlika u dizajnu s uzastopnim uzbude motora sa zasebnim pobude: pobudnog namotaja LM DTP sa serijom pobude dirigent od istog presjeka kao kod armature navijanje.
Fig. 2.8. Dijagram uključivanja DCT uz uzastopno uzbuđenje.
Sa rotirajućom armaturom u svom namotaju, indukuje se emf. rotacija ^ E. Na šemi uključivanja smera motora E suprotno smeru U, što odgovara režimu rada motora. Vrednost E jednak je:
Gde ?
- uglovna brzina motora; F - protok motora;  - Konstruktivni koeficijent podataka motora za obračun, koji su navedeni u referentnim knjigama. Ovde str - broj parova motornih polova; N - broj aktivnih provodnika za namotavanje armature; a - broj parova paralelnih grana namotaja armature.
- Konstruktivni koeficijent podataka motora za obračun, koji su navedeni u referentnim knjigama. Ovde str - broj parova motornih polova; N - broj aktivnih provodnika za namotavanje armature; a - broj parova paralelnih grana namotaja armature.
Smer struje sidra Ja Ja , poput pravca E na dijagramu veze se prikazuje za režim rada motora.
Dozvoljena vrednost struje sidra motora Ja ja dodam ograničena je uslovima preklapanja i mehaničkom čvrstinom armature i ne smije prelaziti nominalnu struju Ja yang više od 2,5 puta Ja ja dodam ? 2.5 I yang .
U skladu sa ravnoteže jednadžbe stresa na stabilan rad motora, napon U, na motor armature kolo uravnotežena od pada napona u armaturu kolo Ja ja R jaje i indukovano u armaturu namotaja emf. rotacija E:
U = I Â R ÂC + E
Gde R JC = R Ja + R DP + R KO + R U + R P - ukupan otpor sidrenog lanca. Ovde R Ja - otpornost na navijanje armature; R DP - otpornost navijanja dodatnih polova; R KO - otpornost navijanja kompenzacije; R U - otpornost navijanja uzbude; R P - otpor startnog reostata.
Vrednost Ja Ja u stabilnom stanju će biti:
U režimu starta ^ E = 0, stoga, zbog male otpornosti namotaja, startna struja Ja Ja sam može premašiti dozvoljenu vrijednost. Da bi se ograničila startna struja koristi se početni reostat čiji je otpor R P izabran je na takav način da Ja Ja sam ? Ja Ja sam DOP
može dobiti analitički izraz za mehaničke karakteristike motora iz jednadžbe ravnoteže napona za sidreni lanac.
Zamenjuje ga umesto emf. rotacija ^ E njegovu vrednost i rešavanje rezultirajuće jednačine u odnosu na brzinu, dobijamo zavisnost brzine motora ? od struje struje Ja Ja ? = f (I Ja ) , što se zove elektromehanička karakteristika:
S obzirom da je namotaj ekscitacije povezano serijsko sa armaturom motora, magnetni tok koji ga generiše ^ Φ funkcija toka armature Ja Ja . Zavisnost F = f (I Ja ) naziva se kriva magnetizacije i ima nelinearni karakter tipa "zasićenja". Precizan analitički opis ove krive ne postoji, stoga nema precizne analitičke opis mehaničkih karakteristika niza pobude DTP. Ako, zanemarujući zasićenost magnetnog sistema, pretpostavljamo linearnu vezu između F i Ja Ja sa koeficijentom proporcionalnosti?, to jest, F =? I Ja , onda je obrtni moment:
M = kΦI H = k? I H 2
Stoga će vrednost struje armature biti:
Zamenjujući u jednačinu elektromehaničke karakteristike vrijednost za Ja ja , dobijamo jednačinu mehaničke karakteristike:
Gde A = U / k?; B = R JC / (k?) - konstantne vrijednosti.
Analiza dobijene jednačine pokazuje da je osa ordinata asimptota za krivu i da u regionu malih vrednosti momenta ima veliku strmošću
Kada R P =0 i U = U gospodin motor radi na prirodnoj karakteristici. Da bi se izgradila prirodna karakteristika, koriste se takozvane univerzalne karakteristike, koje su date u katalogima za svaku seriju motora. Oni predstavljaju zavisnosti n = f (I Ja ) i M = f (I Ja ) u relativnim jedinicama. Poznavajući nominalne podatke motora, moguće je konstruisati njegovu karakteristiku u apsolutnim vrijednostima. Ova karakteristika je prikazana na Sl. 2.9.
Fig. 2.9. Mehaničke karakteristike DC motora serijske ekscitacije.
Karakteristika karakteristika je naglo povećanje brzine s smanjenjem momenta otpora M sa . Dakle, DC motor sa serijskom ekscitacijom ne može se započeti u onim slučajevima gde M sa gospodin , jer brzina motora može premašiti dozvoljenu vrednost ?
dodatni =2,5 ?
gospodin . Ova karakteristika se može objasniti razmatranjem procesa koji se javljaju u motoru uz smanjenje opterećenja. Pretpostavimo da je motor radio na tački A na prirodnoj karakteristici (pogledajte sliku 2.9.) U stalnom stanju brzinom ?
1
. Kada se trenutak otpora smanji od vrednosti M c1 na primjer, do M c2 , pojavljuje se pozitivan dinamični trenutak M D >0
a brzina motora počinje da se povećava. Uz nezavisno uzbuđenje, posledica ovoga je povećanje emisije. rotacija  i smanjenje struje armature
i smanjenje struje armature  i obrtnog momenta
i obrtnog momenta  . Povećanje brzine i smanjenje obrtnog momenta motora nastaviće do momenta motora M on će postati jednak M c2 i M D postaje nula.
. Povećanje brzine i smanjenje obrtnog momenta motora nastaviće do momenta motora M on će postati jednak M c2 i M D postaje nula.
Uz uzastopno uzbuđenje emf. rotacija E ispada da je funkcija dve veličine - povećanje brzine ? i smanjenje protoka F. Kao rezultat, količina E, a time i količine Ja Ja i M, sa povećanjem brzine neće se značajno mijenjati, što dovodi do očuvanja M D >0 i dalje povećavaju brzinu. Ako je otpor početnog reostata R P >0 , onda statička brzina pada ?? sa u istom momentu motora će biti više nego na prirodnim karakteristikama. Prema tome, karakteristike reostat će imati veliki nagib osi abscisa.
Uz uzastopno uzbuđenje, obrtni moment je proporcionalan kvadratnom strujom armature  i ograničavanje startne struje na vrednost Ja Ja sam DOP ? 2.5I YaN dozvoljava nam da steknemo mnogo više od nezavisnog uzbuđenja M DOP = 5 M H . Prekomerni strujni motor motora sa serijskim uzbuđenjem pomoću obrtnog momenta
i ograničavanje startne struje na vrednost Ja Ja sam DOP ? 2.5I YaN dozvoljava nam da steknemo mnogo više od nezavisnog uzbuđenja M DOP = 5 M H . Prekomerni strujni motor motora sa serijskim uzbuđenjem pomoću obrtnog momenta
K P = M DOP / M H je jednako pet. Ovaj kapacitet preopterećenja ne poseduje više od jednog elektromotora. Zahvaljujući ovom svojstvu, motori sa sekvencijalnim uzbuđenjem koriste se u mehanizmu električnog transporta i podizanja.
Predavanje 8.
^ 2.6. Mehaničke karakteristike DC motora sa serijskom ekscitacijom. Način električnog kočenja.
Postoje dva načina električnog kočenja: dinamično kočenje i kočenje suprotstavljanjem. Regenerativna inhibicija nije moguća, jer emf. rotacija Ene može biti više od napona izvornog sidra U.
^ Dinamičko kočenje realizuje se na dva načina: sa samosvesti i uz nezavisno uzbuđenje. Shema za uključivanje motora i mehaničke karakteristike za prvi slučaj prikazana su na Sl. 2.10.
Fig. 2.10. a) shemu uključivanja motora u način dinamičkog kočenja sa samosvjetom;
B) karakteristike motora u načinu dinamičkog kočenja sa samosvjetom.
Motor se isključuje od izvora napona, a namotavanje polja se uključuje tako da je pravac struje Ja U u njemu je bio isti kao u režimu motora (pogledajte sliku 2.8). Ovo zadržavanje trenutnog pravca eliminiše uništavanje malog preostalog fluksa povezanog sa magnetizacijom stator motora. Ovaj potok je uzrok sebi pobude: u armaturu navijanje, rotirajući pod djelovanjem sile inercije u istom pravcu, inducirana EMS E, u pravcu koji je isti kao u režimu motora. Pod akcijom E Struja se pojavljuje u dinamičkom kočionom krugu, što dovodi do povećanja fluksa F, emf. E i struja Ja Ja . Od trenutka Ja Ja u odnosu na režim motora ima suprotan smer, obrtni moment motora postaje inhibitorni. Motor iz tačke A u prvom kvadrantu prelazi na tačku B ili C na karakteristiku dinamičkog kočenja u drugom kvadrantu. U početku, proces samo-pobude je vrlo intenzivan, a to dovodi do roll kočnica momenta mogu izazvati udaraca mehanički dio pogona. Zbog toga se češće koristi dinamično kočenje sa nezavisnom ekscitacijom. Šema za uključivanje motora i mehaničke karakteristike su prikazane na Sl. 2.11.
Fig. 2.11. a) shemu za uključivanje motora u dinamiku
Kočenje sa nezavisnom ekscitacijom;
B) karakteristike motora u dinamici
Kočenje uz nezavisno uzbuđenje.
Pričvršćivači armaturnih motora su kratki do dinamičkog otpora kočenja R DT , a navijanje polja je povezano sa naponom izvora kroz otpor R U . Struja u njoj je usmerena kao u režimu motora i podešena je jednaka nominalnoj. Karakteristike su slične onima u DCT sa nezavisnim uzbunom: one su linearne, nalaze se u drugom kvadrantu i prolaze kroz poreklo.
^ Zaustavljanje usporavanja Što se tiče DTP nezavisne uzbude se vrši u slučaju kada je namotaja motora su uključeni u jednom smjeru vrtnje, i motor armature pod uticajem sila inercije ili moment otpora aktivnog se rotira u suprotnom smjeru - uključivanje.
Reverzibilna šema za uključivanje DCT uz uzastopno uzbuđenje je prikazana na Sl. 2.12.
![]()
Fig. 2.12. Reverzibilna šema prelaska na DCT uz serijsku ekscitaciju.
Svrha elemenata je ista kao u kolu na Sl. 2.5. Kada se motor okrene sa strane armature, zadržava se trenutni pravac u LM navijanju. Dakle, svi procesi tokom kočenja su analogni onima koji se javljaju u krugu na Sl. 2.5. Karakteristike motora su prikazane na Sl. 2.13.

Fig. 2.13.a) karakteristike DCT uz uzastopno uzbuđenje u režimu usporavanja antikoincidencijom.
B) slične karakteristike sa aktivnim M s.
Predavanje 9.
^ 2.7. Mehaničke karakteristike indukcionih motora. Motorni režim.
Asinhroni motori (AD) - najčešći tip motora, jer oni su jednostavniji i pouzdani u radu, sa jednakom snagom imaju manju masu, dimenzije i troškove u poređenju sa DPT-om. Sheme za uključivanje krvnog pritiska prikazane su na Sl. 2.14.
Do nedavno su se u nereguliranim električnim pogonima koristili AD sa rotorom veveričnog kaveza. Međutim, s pojavom tiristorski frekventnih regulatora (TFC) napon napajanja BP namotaja statora kavez motora počeo da se koristi u kontroliranim električnih pogona. Trenutno, tranzistori snage i programabilni kontroleri se koriste u frekventnim pretvaračima. Način regulacije brzine naziva se impuls i njegovo unapređenje je najvažniji pravac u razvoju elektromotornog pogona.
Fig. 2.14. a) shemu uključivanja AD sa rotorom veveričnog kaveza;
B) shemu za uključivanje AD sa faznim rotorom.
Jednačina mehaničke karakteristike krvnog pritiska može se dobiti na osnovu sheme supstitucije krvnog pritiska. Ako zanemarimo aktivni otpor statora u ovom krugu, izraz za mehaničke karakteristike će izgledati:
 ,
,
Gde  ;
;  .
.
Ovde M to – kritičan trenutak; S to - odgovarajući kritični klizač; U f - efektivna vrednost faznog napona mreže; ? 0 = 2? F / str - ugaona brzina rotirajućeg magnetnog polja AD (sinhroni broj obrtaja); f Učestalost napona napajanja; str - broj parova pola krvnog pritiska; x to - otpornost na kratkospojnu indukcijsku fazu (određena iz kruga zamjene); S = (? 0 -?)/? 0 - klizanje (brzina rotora u odnosu na brzinu rotirajućeg polja); R 2 1 - ukupan aktivni otpor faze rotora.
Mehanička karakteristika AD s rotorom veveričnog kaveza prikazana je na Sl. 2.15.
Fig. 2.15. Mehanička karakteristika kratkospojnog rotora.
Na njemu postoje tri karakteristične tačke. Koordinate prve tačke ( S = 0; ? =? 0 ; M = 0). Odgovara idealnom režimu rada u praznom hodu, kada je brzina rotora jednaka brzini rotirajućeg magnetnog polja. Koordinate druge tačke ( S = S to ; M = M to). Motor radi sa maksimalnim obrtnim momentom. Kada M sa \u003e M to motor će biti primoran da se zaustavi, a za motor je kratki spoj. Zbog toga je obrtni moment motora u ovom trenutku kritičan M to . Koordinate treće tačke ( S = 1; ? = 0; M = M n). U ovom trenutku, motor radi u startnom režimu: brzina rotora? = 0, a startni obrtni moment deluje na fiksni rotor M n . Odjeljak mehaničke karakteristike lociran između prve i druge karakteristične tačke naziva se radni deo. Na njemu, motor radi u stabilnom stanju. Sa kratkim spojem rotor, ako su uslovi U = U gospodin i f = f gospodin mehanička karakteristika se zove prirodna. U ovom slučaju, u radnom delu karakteristike postoji tačka koja odgovara nominalnom načinu rada motora i ima koordinate ( S gospodin ; ? gospodin ; M gospodin).
Elektromehaničke karakteristike krvnog pritiska ? = f (I f ) , što je prikazano na Sl.2.15 kao isprekidana linija, za razliku od elektromehaničkih karakteristika DCT-a, poklapa se sa mehaničkim karakteristikama samo u svom delovnom delu. Ovo je zbog činjenice da je prilikom pokretanja zbog promjene frekvencije emf. u navoju rotora E 2 frekvencija struje i odnos induktivnih i aktivnih otpornosti navoja varira: na početku starta frekvencija struje je velika, a induktivni otpor je veći od aktivnog; sa povećanjem brzine rotora ? smanjuje se frekvencija struje rotora, a time i induktivni otpor njenog navijanja. Dakle, ulazna struja AD u režimu direktnog starta je 5-7 puta veća od naznačene vrednosti Ja fn , i početni moment M n je jednak nominalnom M gospodin . Za razliku od DPT-a, gde je kod start-upa potrebno ograničiti startnu struju i početni obrtni moment, prilikom pokretanja AD, startna struja mora biti ograničena, a startni moment povećan. Poslednja okolnost je najvažnija, pošto se DCT sa nezavisnom ekscitacijom aktivira kada M sa gospodin , DFT sa sekvencijalnom ekscitacijom na M sa gospodin , i krvni pritisak tokom rada na prirodnoj karakteristici M sa gospodin .
U AD sa rotorom veverer-kaveza, povećanje M n Obezbeđen je poseban dizajn navijanja rotor. Žleb za navijanje rotorja je napravljen duboko, a sam navijanje je raspoređen u dva sloja. Kada se motor pokreće, frekvencija E 2 a struje rotora su velike, što dovodi do pojave efekta trenutnog pomjeranja - struja tekuje samo u gornjim slojevima namotaja. Dakle, otpornost na navijanje i startni moment motora M P . Njena veličina može da dostigne 1.5M gospodin .
U AD sa faznim rotorom, povećanje M P se obezbeđuje promenom njegovih mehaničkih karakteristika. Ako je otpor R P , uključen u trenutni protok rotor, je nula - motor radi na prirodnim karakteristikama i M P = M H . Kada R P >0 ukupan aktivni otpor faze rotora je povećan R 2 1 . Kritično klizanje S to as R 2 1 takođe se povećava. Kao posledica, u AD sa faznim rotorom, uvod R P u trenutnom putu protoka rotora dovodi do pomeranja M To u pravcu velikih slajdova. Kada S To = 1 M P = M To . Mehaničke karakteristike AD sa faznim rotorom na R P >0 se zovu veštački ili reostatični. Oni su prikazani na Sl. 2.16.
Fig. 2.16. Mehaničke karakteristike AD sa faznim rotorom.
Indukcioni motor sa rotorom veveričnog kaveza počinje sa radom M n \u003e M sa i raditi u tački A (vidi sliku 2.15). Posle ovoga, trenutak otpora M sa može se povećati M To . AD, kao i DC motori, sa povećanjem M sa automatski će, bez vanjskih smetnji, smanjiti brzinu ? i povećati obrtni moment M koliko god M i M sa Ne jednaka po veličini, npr. iz režima stabilnog stanja sa većom brzinom za pomeranje u stabilan način sa manjom brzinom. Kada se smanjuje M sa obratiti se suprotnoj - motor iz stabilnog stanja sa nižim brzinama automatski će se prebaciti na stabilan način pri većoj brzini. Radni deo mehaničke karakteristike krvnog pritiska je analogan mehaničkim karakteristikama DCT sa nezavisnim uzbunom - ravnom linijom nagnuto osi abscisa.
Takva svojstva krvnog pritiska su posledica emf. E 2 , što je indukovano rotirajućim magnetnim poljem statora u navijanju rotora. Kada M sa \u003e M dinamičan trenutak M d i brzinu rotora ? opada. Magnetno polje statora rotira sa konstantnom brzinom ? 0 (sinhrona brzina) prelazi navijanje rotora sa visokom frekvencijom. Zbog toga, E 2 , struju u navitku rotora, Ampereovu silu koja deluje na njegovim okretima, a time i obrtni moment M.
Sposobnost preopterećenja AD-a za trenutak je određena odnosom kritičnog momenta M To do vremena nominalnog M H . Za konvencionalne AD s rotorom veveričnog kaveza M To / M H =1,7 , sa faznim rotorom M To / M H =1,8 . Za posebne pritiske krana s rotorom veveričnog kaveza tipa MTK i faznim rotorom tipa MTKF, odnos M To / M H = 2.3 h3.4.